计算机视觉2D几何基元及其变换介绍和OpenCV WarpPerspective源码分析
2D图像几何基元
一般的,表示一个2d几何基元只用两个维度(比如x,y)就可以表示了,但是在计算机视觉研究中,为了统一对2d几何基元的操作(后面讲到的仿射,透射变换),一般会以增广矢量的方式表示几何基元。
1. 区分n维空间的点和向量,一个点的第n+1维为非零值,而向量的n+1维为02. 统一几何基元的旋转,平移,拉伸,投影等操作(只用一个矩阵就可以表示)
 ,其中仅在尺度上不同的矢量被视为等同的,被称作为2D投影空间,其次矢量
,其中仅在尺度上不同的矢量被视为等同的,被称作为2D投影空间,其次矢量 可以通过除以最后你一个元素
可以通过除以最后你一个元素 来转换为非齐次矢量X,即:其中,是增广矢量,如果最后w为0,则称此点为理想点或者无穷远点,它没有等同的非齐次表达
来转换为非齐次矢量X,即:其中,是增广矢量,如果最后w为0,则称此点为理想点或者无穷远点,它没有等同的非齐次表达
 表示,其对应的直线方程为:
表示,其对应的直线方程为:
 ,其规范化表达为,如果 l = (0,0,1),则包含所有无穷远点
,其规范化表达为,如果 l = (0,0,1),则包含所有无穷远点
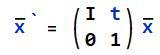 ,其中I是2x2的单位矩阵
,其中I是2x2的单位矩阵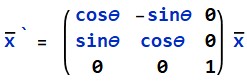

import numpy as np
import cv2 as cv
from numba import jit
import matplotlib.pyplot as plt
from matplotlib.font_manager import FontProperties def MoveT(tx, ty, lastOp = None)->np.ndarray:
op = np.array([[1, 0, tx], [0, 1, ty], [0, 0, 1]], dtype=np.float32)
if lastOp is not None:
op = np.dot(op, lastOp)
return op def RotateT(r, lastOp = None)->np.ndarray:
op = np.array([[np.cos(r), -np.sin(r), 0], [np.sin(r), np.cos(r), 0], [0, 0, 1]], dtype=np.float32)
if lastOp is not None:
op = np.dot(op, lastOp)
return op def ZoomT(rx, ry, lastOp = None)->np.ndarray:
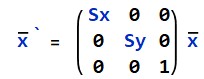
op = np.array([[rx, 0, 0], [0, ry, 0], [0, 0, 1]], dtype=np.float32)
if lastOp is not None:
op = np.dot(op, lastOp)
return op def Transform(imgSrc:np.ndarray, op)->np.ndarray:
h, w = imgSrc.shape[:2]
imgDst = np.zeros(imgSrc.shape, dtype=imgSrc.dtype)
for i in range(h):
v1 = np.stack((np.arange(w), np.ones(w)*i, np.ones(w)),axis=-1)
v2 = np.dot(v1, op)
tpx, tpy, tpz = np.hsplit(v2, 3)
for iy, ix, iz, j in zip(tpy, tpx, tpz, range(w)):
py, px = int(iy/iz), int(ix/iz)
if 0<= py < h and 0 <= px < w:
imgDst[int(py), int(px)] = imgSrc[i, j] return imgDst
if __name__ == "__main__":
font_set = FontProperties(fname=r"c:\windows\fonts\msyh.ttc", size=12)
imgSrc = plt.imread("E:/Users/Administrator/pictures/Test/user.jpg")
op = np.transpose(MoveT(10,30, RotateT(np.pi/12, ZoomT(1.1, 1.2)))) imgDst = Transform(imgSrc, op)
plt.figure(1), plt.imshow(imgDst), plt.title("Resuult", fontproperties=font_set)
plt.show()
1. 对y尺度放大1.1倍,x尺度放大1.2倍2. 绕z轴(垂直于x,y)旋转π/12度3. x方向移动30像素,y方向移动10像素
 |
 |
| fig1: 原图 | fig2: 仿射变换结果 |
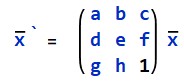
 ,并且设h33 = 1,那么就要把剩下的8个参数给解出来,8个未知数需要8个方程,又因为从仿射变换的对应关系,可以列方程为:
,并且设h33 = 1,那么就要把剩下的8个参数给解出来,8个未知数需要8个方程,又因为从仿射变换的对应关系,可以列方程为: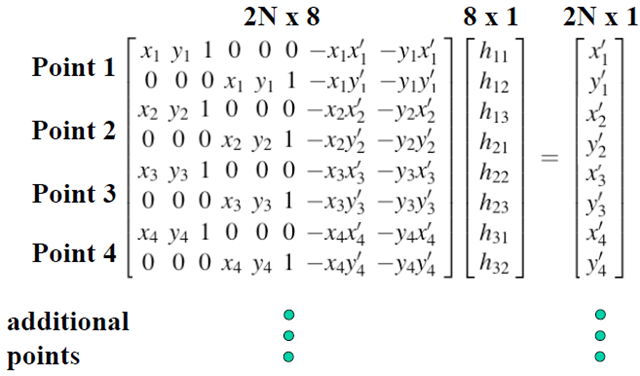
# WarpCorrection.py @jit
def BilinearInterpolation(imgSrc:np.ndarray, h, w, sx:float, sy:float)->float:
"""
对图片的指定位置做双线性插值
:param imgSrc:源图像
:param h: src的高度
:param w: src的宽度
:param sx: x位置
:param sy: y位置
:return: 所插入的值
"""
intSx, intSy = int(sx), int(sy)
if 0 <= intSx < w - 1 and 0 <= intSy < h - 1:
x1, x2 = intSx, intSx + 1
y1, y2 = intSy, intSy + 1
H1 = np.dot(np.array([x2 - sx, sx - x1]), imgSrc[y1: y2 + 1, x1:x2 + 1])
return H1[0]*(y2 - sy) + H1[1]*(sy - y1)
else:
return imgSrc[intSy, intSx] def WarpCorrection(imgSrc:np.ndarray, dots:tuple)->np.ndarray:
assert len(dots) == 4 # 四个点的顺序一定要按照左上,右上,右下,左下的顺时针顺序点
d1, d2, d3, d4 = dots
x1, x2, x3, x4 = d1[0], d2[0], d3[0], d4[0]
y1, y2, y3, y4 = d1[1], d2[1], d3[1], d4[1]
assert x1 < x2
assert x4 < x3
assert y1 < y4
assert y2 < y3 objW = np.round(np.sqrt((x1 - x2) ** 2 + (y1 - y2) ** 2))
objH = np.round(np.sqrt((x2 - x3) ** 2 + (y2 - y3) ** 2)) # 在这里我简单地设为把所输入的四个点的位置,通过2D变换,变换为长方形的四个顶点的位置(以x1为起点)
t1, t2, t3, t4 = (y1, x1), (y1, x1 + objW), (y1 + objH, x1 + objW), (y1 + objH, x1), rx1, rx2, rx3, rx4 = t1[1], t2[1], t3[1], t4[1]
ry1, ry2, ry3, ry4 = t1[0], t2[0], t3[0], t4[0] # ================Step 0: 根据 8个点两两对应关系找到Homography矩阵================
# 把8个约束写成方程组,以矩阵的形式表达
m = np.array([
[y1, x1, 1, 0, 0, 0, -ry1 * y1, -ry1 * x1],
[0, 0, 0, y1, x1, 1, -rx1 * y1, -rx1 * x1],
[y2, x2, 1, 0, 0, 0, -ry2 * y2, -ry2 * x2],
[0, 0, 0, y2, x2, 1, -rx2 * y2, -rx2 * x2],
[y3, x3, 1, 0, 0, 0, -ry3 * y3, -ry3 * x3],
[0, 0, 0, y3, x3, 1, -rx3 * y3, -rx3 * x3],
[y4, x4, 1, 0, 0, 0, -ry4 * y4, -ry4 * x4],
[0, 0, 0, y4, x4, 1, -rx4 * y4, -rx4 * x4],
]) vectorSrc = np.array([ry1, rx1, ry2, rx2, ry3, rx3, ry4, rx4])
vectorSrc.shape = (1, 8)
HFlat = np.dot(np.linalg.inv(m), np.transpose(vectorSrc))
a, b, c, d, e, f, g, h = HFlat[0, 0],HFlat[1, 0],HFlat[2, 0],HFlat[3, 0],HFlat[4, 0],HFlat[5, 0],HFlat[6, 0],HFlat[7, 0] H = np.array([[a, b, c],
[d, e, f],
[g, h, 1]], dtype=np.float32) # ================Step 1: 通过对原图像四个顶点进行正向投射变换,确定目标图像区域================
height, width = imgSrc.shape[:2]
matrixOriginVertex = np.array([[0, 0, 1],
[0, width - 1, 1],
[height - 1, width - 1, 1] ,
[height - 1, 0, 1]]) result = np.dot(matrixOriginVertex, np.transpose(H))
minX = int(min(result[0, 1]/result[0, 2], result[1, 1]/result[1, 2], result[2, 1]/result[2, 2], result[3, 1]/result[3, 2]))
maxX = int(max(result[0, 1]/result[0, 2], result[1, 1]/result[1, 2], result[2, 1]/result[2, 2], result[3, 1]/result[3, 2]))
minY = int(min(result[0, 0]/result[0, 2], result[1, 0]/result[1, 2], result[2, 0]/result[2, 2], result[3, 0]/result[3, 2]))
maxY = int(max(result[0, 0]/result[0, 2], result[1, 0]/result[1, 2], result[2, 0]/result[2, 2], result[3, 0]/result[3, 2])) # ================Step 2: 反向变换+双二次插值校正图像================
vtr = np.empty((0,3),dtype=np.float32)
for i in range(minY, maxY):
arr1 = np.arange(minX, maxX)
arr2 = np.ones(maxX - minX)
vt1 = np.stack((arr2*i, arr1 , arr2), axis=-1)
vtr = np.concatenate((vtr, vt1), axis=0) # 请注意,因为传进去的是规范化后(Y, X, 1)的值,所以得到的其实是(y/Z, x/Z, 1/Z的值)
vts = np.dot(vtr,np.linalg.inv(np.transpose(H)))
dstHeight, dstWidth = maxY - minY + 1, maxX - minX + 1
imgDst = np.zeros((dstHeight, dstWidth, imgSrc.shape[2]), dtype=imgSrc.dtype) for (r, s) in zip(vtr, vts):
ry, rx = int(r[0]), int(r[1])
iy, ix = s[:2]
# 需要解 [y, x] = [iy*(g*y + h*x + 1), ix*(g*y + h*x + 1)]这个方程
TH = np.linalg.inv(np.array([[iy * g - 1, iy * h],
[ix * g, ix * h - 1]])) vxy = np.dot(TH, np.array([[-iy], [-ix]]))
sy, sx = vxy[0, 0], vxy[1, 0] if 0 <= round(sy) < height and 0 <= round(sx) < width:
imgDst[ry - minY, rx - minX] = BilinearInterpolation(imgSrc, height, width, sx, sy) return imgDst
这里使用了双二次插值,双二次插值的公式推导如下:
 |
 |
| fig3. 双二次插值公式推导 | fig4. 双二次插值图像解释 |
# -*- coding: utf-8 -*-
import matplotlib.pyplot as plt
from matplotlib.font_manager import FontProperties
from WarpTransform import *
from multiprocessing.dummy import Process windowCount = int(0)
mainWinName = "source" def WarpImage(imgSrc:np.ndarray, dots:tuple, count)->None:
imgBLiner, imgNearest = WarpCorrection(imgSrc, dots) winName:str = f"result BLiner {count}"
cv.namedWindow(winName)
cv.imshow(winName, imgBLiner) winName:str = f"result nearest {count}"
cv.namedWindow(winName)
cv.imshow(winName, imgNearest) cv.waitKey(0)
cv.destroyWindow(winName) class WarpCorrectionMgr:
def __init__(self, imgSrc):
self.__clickTime = 0
self.__imgSrc = imgSrc.copy()
self.__imgDrawn = imgSrc.copy()
self.__dots = [] @property
def sourceImage(self):
return self.__imgSrc @property
def drawnImage(self):
return self.__imgDrawn @drawnImage.setter
def drawnImage(self, newImg):
self.__imgDrawn = newImg @property
def clickTime(self):
return self.__clickTime @clickTime.setter
def clickTime(self, v):
self.__clickTime = v @property
def dots(self):
return self.__dots @staticmethod
def MouseCallback(event, x, y, flags, param):
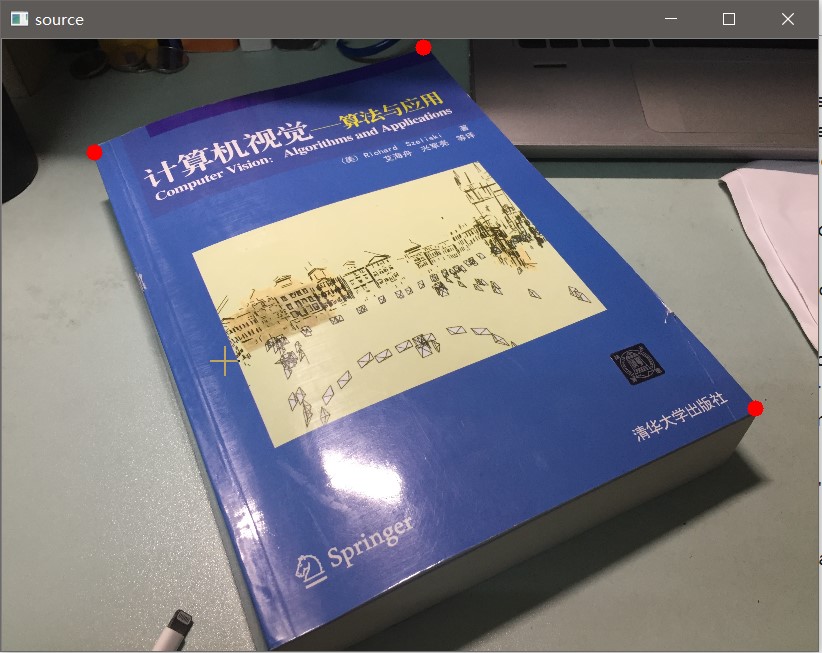
# 四个点的顺序一定要按照左上,右上,右下,左下的顺时针顺序点
if event == cv.EVENT_LBUTTONDBLCLK:
clickTime = param.clickTime
cv.circle(param.drawnImage, (x, y), 8, (0, 0, 255),-1)
param.dots.append((x, y))
cv.imshow(mainWinName, param.drawnImage) if clickTime + 1 == 4:
global windowCount
p = Process(target=WarpImage, args=(param.sourceImage, param.dots.copy(), windowCount))
p.daemon = True
p.start() param.drawnImage = param.sourceImage.copy()
cv.imshow(mainWinName,param.sourceImage)
param.dots.clear()
windowCount += 1 param.clickTime = (clickTime + 1) % 4 if __name__ == "__main__":
cv.namedWindow(mainWinName)
imgSrc = cv.imread("E:/Users/Administrator/pictures/Test/skew.jpg")
imgSrc = cv.resize(imgSrc, (int(imgSrc.shape[1]/4), int(imgSrc.shape[0]/4))) mgr = WarpCorrectionMgr(imgSrc)
cv.setMouseCallback(mainWinName, WarpCorrectionMgr.MouseCallback, mgr) cv.imshow(mainWinName, imgSrc)
cv.waitKey(0)
cv.destroyAllWindows()
为了对比最近邻插值和双二次插值的差别,我把WarpCorrection改了一下:
# 请注意,因为传进去的是规范化后(Y, X, 1)的值,所以得到的其实是(y/Z, x/Z, 1/Z的值)
vts = np.dot(vtr,np.linalg.inv(np.transpose(H)))
dstHeight, dstWidth = maxY - minY + 1, maxX - minX + 1
imgBLiner = np.zeros((dstHeight, dstWidth, imgSrc.shape[2]), dtype=imgSrc.dtype)
imgNearest = np.zeros((dstHeight, dstWidth, imgSrc.shape[2]), dtype=imgSrc.dtype) for (r, s) in zip(vtr, vts):
ry, rx = int(r[0]), int(r[1])
iy, ix = s[:2]
# 需要解 [y, x] = [iy*(g*y + h*x + 1), ix*(g*y + h*x + 1)]这个方程
TH = np.linalg.inv(np.array([[iy * g - 1, iy * h],
[ix * g, ix * h - 1]])) vxy = np.dot(TH, np.array([[-iy], [-ix]]))
sy, sx = vxy[0, 0], vxy[1, 0] if 0 <= round(sy) < height and 0 <= round(sx) < width:
imgBLiner[ry - minY, rx - minX] = BilinearInterpolation(imgSrc, height, width, sx, sy)
imgNearest[ry - minY, rx - minX] = imgSrc[int(round(sy)),int(round(sx))] return imgBLiner, imgNearest
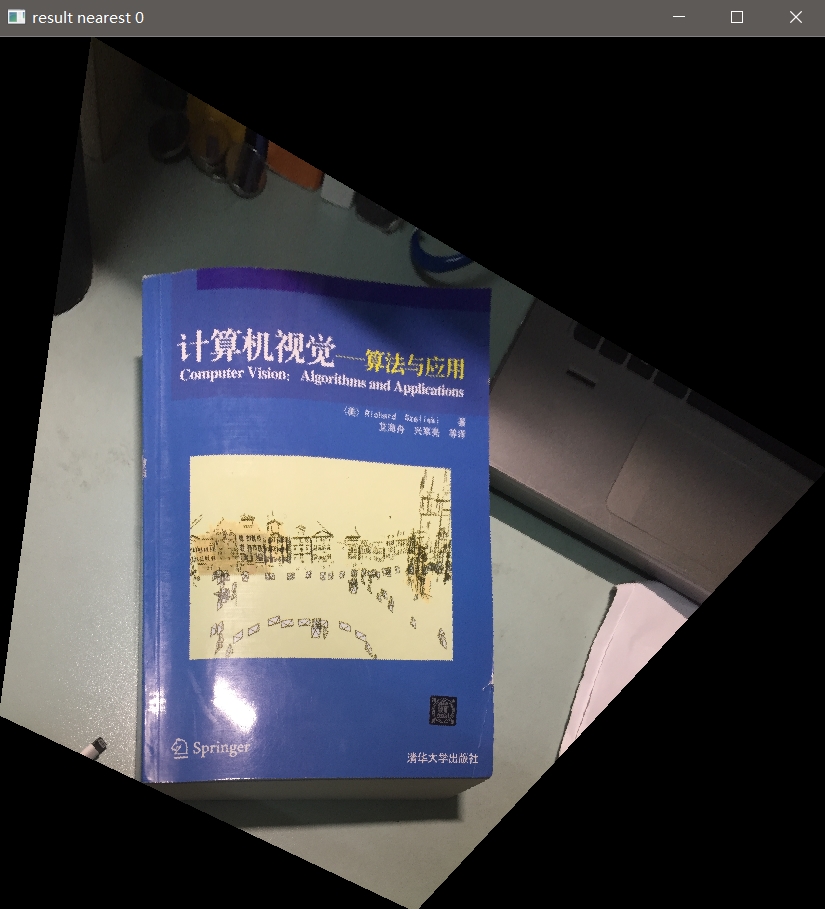 |
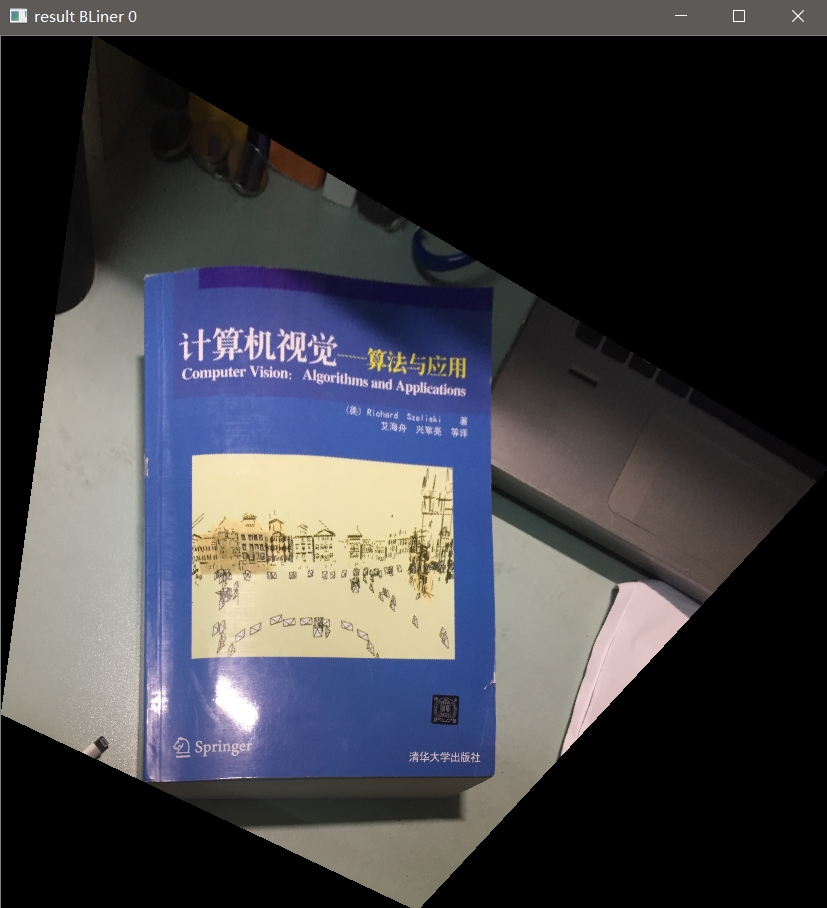 |
| Fig3. 最近邻插值(边缘很粗糙,看“清华大学出版社”几个字) | Fig4. 双二次插值(毛刺很少,但是图像模糊了) |
void cv::warpPerspective( InputArray _src, OutputArray _dst, InputArray _M0,
Size dsize, int flags, int borderType, const Scalar& borderValue )
{
Mat src = _src.getMat(), M0 = _M0.getMat();
_dst.create( dsize.area() == ? src.size() : dsize, src.type() );
Mat dst = _dst.getMat(); if( dst.data == src.data )
src = src.clone(); double M[];
Mat matM(, , CV_64F, M);
int interpolation = flags & INTER_MAX; // 插入方法不支持INTER_AREA,用INTER_LINEAR代替
if( interpolation == INTER_AREA )
interpolation = INTER_LINEAR; CV_Assert( (M0.type() == CV_32F || M0.type() == CV_64F) && M0.rows == && M0.cols == );
M0.convertTo(matM, matM.type()); //这里源码是这样操作的,如果可以执行IPP,那么就直接执行IPP指令加块操作
//如果没有说明传入的变换矩阵已经转置过了,那么执行一次矩阵转置
if( !(flags & WARP_INVERSE_MAP) )
invert(matM, matM); hal::warpPerspectve(src.type(), src.data, src.step, src.cols, src.rows, dst.data, dst.step, dst.cols, dst.rows,
matM.ptr<double>(), interpolation, borderType, borderValue.val);
}
namespace hal {
void warpPerspectve(int src_type,
const uchar * src_data, size_t src_step, int src_width, int src_height,
uchar * dst_data, size_t dst_step, int dst_width, int dst_height,
const double M[], int interpolation, int borderType, const double borderValue[])
{
Mat src(Size(src_width, src_height), src_type, const_cast<uchar*>(src_data), src_step);
Mat dst(Size(dst_width, dst_height), src_type, dst_data, dst_step);
Range range(, dst.rows);
WarpPerspectiveInvoker invoker(src, dst, M, interpolation, borderType, Scalar(borderValue[], borderValue[], borderValue[], borderValue[]));
//这里是一个opencv执行并行处理的一个方法,真正执行处理的代码在WarpPerspectiveInvoker的函数对象操作符中
parallel_for_(range, invoker, dst.total()/(double)(<<));
}
} // hal::
class WarpPerspectiveInvoker :
public ParallelLoopBody
{
public:
WarpPerspectiveInvoker(const Mat &_src, Mat &_dst, const double *_M, int _interpolation,
int _borderType, const Scalar &_borderValue) :
ParallelLoopBody(), src(_src), dst(_dst), M(_M), interpolation(_interpolation),
borderType(_borderType), borderValue(_borderValue)
{
//注意M就是转置矩阵
} virtual void operator() (const Range& range) const
{
const int BLOCK_SZ = ;
short XY[BLOCK_SZ*BLOCK_SZ*], A[BLOCK_SZ*BLOCK_SZ];
int x, y, x1, y1, width = dst.cols, height = dst.rows; int bh0 = std::min(BLOCK_SZ/, height);
int bw0 = std::min(BLOCK_SZ*BLOCK_SZ/bh0, width); //操作块的宽
bh0 = std::min(BLOCK_SZ*BLOCK_SZ/bw0, height); //操作块的高 //下面的意思是,如果支持SSE4指令,那么就先对转置矩阵进行预处理,下面会继续用到这个pwarp_impl_sse4
#if CV_TRY_SSE4_1
Ptr<opt_SSE4_1::WarpPerspectiveLine_SSE4> pwarp_impl_sse4;
if(CV_CPU_HAS_SUPPORT_SSE4_1)
pwarp_impl_sse4 = opt_SSE4_1::WarpPerspectiveLine_SSE4::getImpl(M);
#endif //opencv对投射变换的操作是基于块操作的,主要是为了方便可以直接用SSE4指令给操作提速
for( y = range.start; y < range.end; y += bh0 )
{
for( x = ; x < width; x += bw0 )
{
int bw = std::min( bw0, width - x);
int bh = std::min( bh0, range.end - y); // height //_XY是一个双通道的Mat,下面remap会用到
Mat _XY(bh, bw, CV_16SC2, XY), matA;
Mat dpart(dst, Rect(x, y, bw, bh)); for( y1 = ; y1 < bh; y1++ )
{
short* xy = XY + y1*bw*;
//就是[X,Y,W] = [x,y,1]*M^T的操作
//注意现在是分块操作,所以才有+ M[1]*(y + y1)这一项
double X0 = M[]*x + M[]*(y + y1) + M[];
double Y0 = M[]*x + M[]*(y + y1) + M[];
double W0 = M[]*x + M[]*(y + y1) + M[]; //最近邻插值
if( interpolation == INTER_NEAREST )
{
x1 = ; //这里就是刚才上面所说的pwarp_impl_sse4所用到的位置
#if CV_TRY_SSE4_1
if (pwarp_impl_sse4)
pwarp_impl_sse4->processNN(M, xy, X0, Y0, W0, bw);
else
#endif
for( ; x1 < bw; x1++ )
{
//计算W
double W = W0 + M[]*x1;
W = W ? ./W : ;
//从齐次坐标变到增广矢量,注意现在是分块操作,所以才有+ M[0]*x1这一项
//把结果控制在(INT_MIN, INT_MAX)中,由于下面会有把double转为int
double fX = std::max((double)INT_MIN, std::min((double)INT_MAX, (X0 + M[]*x1)*W));
double fY = std::max((double)INT_MIN, std::min((double)INT_MAX, (Y0 + M[]*x1)*W));
int X = saturate_cast<int>(fX);
int Y = saturate_cast<int>(fY); xy[x1*] = saturate_cast<short>(X);
xy[x1*+] = saturate_cast<short>(Y);
}
}
//其他插值方法
else
{
short* alpha = A + y1*bw;
x1 = ; //原理上同
#if CV_TRY_SSE4_1
if (pwarp_impl_sse4)
pwarp_impl_sse4->process(M, xy, alpha, X0, Y0, W0, bw);
else
#endif
for( ;x1 < bw; x1++ )
{
double W = W0 + M[]*x1;
//INTER_TAB_SIZE在我的opencv版本就是32,INTER_BITS是5
//下面的代码是先把值扩大32倍,再左移5位得到一个值
W = W ? INTER_TAB_SIZE/W : ;
double fX = std::max((double)INT_MIN, std::min((double)INT_MAX, (X0 + M[]*x1)*W));
double fY = std::max((double)INT_MIN, std::min((double)INT_MAX, (Y0 + M[]*x1)*W));
int X = saturate_cast<int>(fX);
int Y = saturate_cast<int>(fY); xy[x1*] = saturate_cast<short>(X >> INTER_BITS);
xy[x1*+] = saturate_cast<short>(Y >> INTER_BITS); //alpha是remap里面所使用的remapBilinear所要用到的一个参数,这里就不往下看了
alpha[x1] = (short)((Y & (INTER_TAB_SIZE-))*INTER_TAB_SIZE +
(X & (INTER_TAB_SIZE-)));
}
}
} if( interpolation == INTER_NEAREST )
//直接运行重映射,直接把源点映射到目标位置的点
remap( src, dpart, _XY, Mat(), interpolation, borderType, borderValue );
else
{
Mat _matA(bh, bw, CV_16U, A);
remap( src, dpart, _XY, _matA, interpolation, borderType, borderValue );
}
}
}
} private:
Mat src;
Mat dst;
const double* M;
int interpolation, borderType;
Scalar borderValue;
};
OpenCV的仿射变换源码和投影变换的类似,只是仿射变换的矩阵M的元素个数是6个
计算机视觉2D几何基元及其变换介绍和OpenCV WarpPerspective源码分析的更多相关文章
- ArrayList相关方法介绍及源码分析
目录 ArrayList简介: ArrayList 相关方法介绍 代码表示 相关方法源码分析 ArrayList简介: java.util.ArrayList 是我们最常用的一个类,ArrayList ...
- FFmpeg libswscale源码分析1-API介绍
本文为作者原创,转载请注明出处:https://www.cnblogs.com/leisure_chn/p/14349382.html libswscale 是 FFmpeg 中完成图像尺寸缩放和像素 ...
- 设计模式(十二)——享元模式(Integer缓冲池源码分析)
1 展示网站项目需求 小型的外包项目,给客户 A 做一个产品展示网站,客户 A 的朋友感觉效果不错,也希望做这样的产品展示网站,但是要求都有些不同: 1) 有客户要求以新闻的形式发布 2) 有客户人要 ...
- 介绍开源的.net通信框架NetworkComms框架 源码分析
原文网址: http://www.cnblogs.com/csdev Networkcomms 是一款C# 语言编写的TCP/UDP通信框架 作者是英国人 以前是收费的 售价249英镑 我曾经花了 ...
- HashMap源码分析和应用实例的介绍
1.HashMap介绍 HashMap 是一个散列表,它存储的内容是键值对(key-value)映射.HashMap 继承于AbstractMap,实现了Map.Cloneable.java.io.S ...
- Hadoop2源码分析-YARN RPC 示例介绍
1.概述 之前在<Hadoop2源码分析-RPC探索实战>一文当中介绍了Hadoop的RPC机制,今天给大家分享关于YARN的RPC的机制.下面是今天的分享目录: YARN的RPC介绍 Y ...
- ThreadLocal介绍以及源码分析
ThreadLocal 线程主变量 前面部分引用其他优秀博客,后面源码自己分析的,如有冒犯请私聊我. 用Java语言开发的同学对 ThreadLocal 应该都不会陌生,这个类的使用场景很多,特别是在 ...
- JUC源码分析-集合篇:并发类容器介绍
JUC源码分析-集合篇:并发类容器介绍 同步类容器是 线程安全 的,如 Vector.HashTable 等容器的同步功能都是由 Collections.synchronizedMap 等工厂方法去创 ...
- ceph-csi组件源码分析(1)-组件介绍与部署yaml分析
更多ceph-csi其他源码分析,请查看下面这篇博文:kubernetes ceph-csi分析目录导航 ceph-csi组件源码分析(1)-组件介绍与部署yaml分析 基于tag v3.0.0 ht ...
随机推荐
- 51nod1113(矩阵快速幂模板)
题目链接:http://www.51nod.com/onlineJudge/questionCode.html#!problemId=1113 题意:中文题诶- 思路:矩阵快速幂模板 代码: #inc ...
- 分层确定性钱包开发的代码实现(HD钱包服务)
HD Wallets的全称是Hierachical Deterministic Wallets, 对应中文是 分层确定性钱包. 这种钱包能够使用一组助记词来管理所有的账户的所有币种,在比特币的BIP3 ...
- 洛谷 P2216 [HAOI2007]理想的正方形
P2216 [HAOI2007]理想的正方形 题目描述 有一个a*b的整数组成的矩阵,现请你从中找出一个n*n的正方形区域,使得该区域所有数中的最大值和最小值的差最小. 输入输出格式 输入格式: 第一 ...
- pytest框架(三)
pytharm运行三种方式 代码示例: # coding=utf-8 import pytest class TestClass: def test_one(self): x = "this ...
- EOS 主节点同步
一.从github克隆主网代码仓库 git clone https://github.com/EOSIO/eos --recursive 二.编译与安装EOS环境 cd ~/eos ./eosio_b ...
- Junit使用总结
对Junit的使用总结,后期会更新! 1.做自动单元测试用的,在方法前面加一个@Test(准备 一个测试用例),这是必须要加上的. 判定是成功还是失败. 最后是加一个断点,Assert.assertE ...
- swift5 正则简单使用
/* 判断是否价格 */ let money = "100.98" let parrern = "^\\d+(\\.\\d{0,2})?$" if NSPred ...
- NOI2015软件包管理器 树剖线段树
题目: 一棵树,兹磁 1.查询根到一个点的染色点数并全染好 2.查询子树内染色点数并把颜色洗掉 树剖裸题,丝毫不虚(为什么我考试的时候碰不到这种好题呢)好像20min写完搞定 #include < ...
- Python网络编程中的服务器架构(负载均衡、单线程、多线程和同步、异步等)
这篇文章主要介绍服务器架构. 网络服务需要面对两个挑战. 第一个问题是核心挑战,要编写出能够正确处理请求并构造合适响应的代码. 第二个挑战是如何将网络代码部署到随系统自动启动的Windows服务或者是 ...
- SLF4J user manual 专题
System Out and Err Redirected to SLF4J The sysout-over-slf4j module allows a user to redirect all ca ...