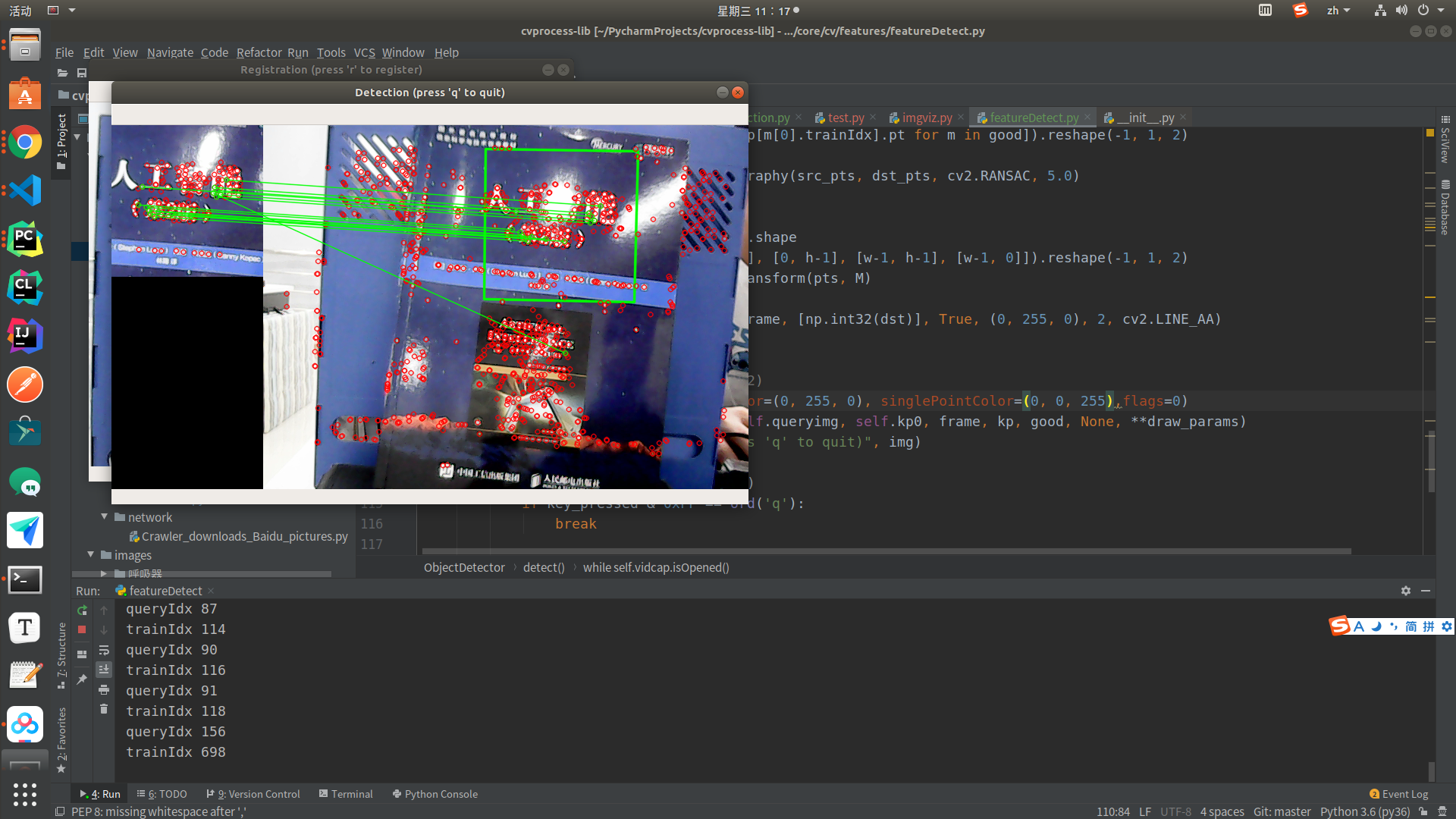
[OpenCV]基于特征匹配的实时平面目标检测算法
一直想基于传统图像匹配方式做一个融合Demo,也算是对上个阶段学习的一个总结。
由此,便采购了一个摄像头,在此基础上做了实时检测平面目标的特征匹配算法。
代码如下:
# coding: utf-8
'''
@author: linxu
@contact: 17746071609@163.com
@time: 2021-07-26 上午11:54
@desc: 基于特征匹配的实时平面目标检测算法
@Ref: https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_feature2d/py_feature_homography/py_feature_homography.htm
'''
import numpy as np
import cv2
class ObjectDetector:
""" 基于特征匹配的实时平面目标检测算法 """
def __init__(self):
# 特征点检测-选择不同的特征描述子
self.feature_detector = cv2.AKAZE_create() # Use AKAZE
# self.feature_detector = cv2.ORB_create() # Use ORB
# self.feature_detector = cv2.KAZE_create()# Use KAZE
# self.feature_detector = cv2.SIFT_create()# Use SIFT
# self.feature_detector = cv2.BRISK_create()# Use BRISK
# 摄像头相机参数设置VideoCapture
self.vidcap = cv2.VideoCapture(0)
self.vidcap.set(3, 640) # 宽度
self.vidcap.set(4, 480) # 高度
self.vidcap.set(5, 15) # 帧率
# 通过ROI(感兴趣区域)来注册目标对象
self.sub_topleft = [100, 220] # [0, 0] # [y,x]100 220
self.sub_width = 200 #640 200
self.sub_height = 200 #480 200
self.sub_bottomright = [self.sub_topleft[0] + self.sub_height - 1,\
self.sub_topleft[1] + self.sub_width - 1]
# rect矩形框体
self.rect_color = (0, 255, 0) # green
self.rect_thickness = 3
self.rect_tl_outer_xy = (self.sub_topleft[1] - self.rect_thickness, self.sub_topleft[0] - self.rect_thickness)
self.rect_br_outer_xy = (self.sub_bottomright[1] + self.rect_thickness, self.sub_bottomright[0] + self.rect_thickness)
# 特征(描述符)向量距离的阈值
self.ratio = 0.75
self.registered = False
self.min_match_count = 5
self.show_rectangle = True
def register(self):
"""注册目标对象"""
print("\n将目标物体靠近相机.")
print("确保对象完全覆盖矩形内部(背景不可见).")
print("然后,按“r”注册对象.\n")
while self.vidcap.isOpened():
ret, frame = self.vidcap.read()
cv2.rectangle(frame, self.rect_tl_outer_xy, self.rect_br_outer_xy,\
self.rect_color, self.rect_thickness)
cv2.imshow("Registration (press 'r' to register)", frame)
if cv2.waitKey(1) & 0xFF == ord('r'):
# 图像切片
subimg = frame[self.sub_topleft[0]:(self.sub_topleft[0] + self.sub_height),
self.sub_topleft[1]:(self.sub_topleft[1] + self.sub_width)]
self.kp0, self.des0 = self.feature_detector.detectAndCompute(subimg, None)
self.queryimg = subimg
self.registered = True
break
def detect(self):
""" 使用特征点查找对象 """
global mask
if not self.registered:
print("Call 'register()' first.")
return
print("Start detection...")
print("按“q”退出.")
print("按“h”隐藏绿色矩形.\n")
# 声明一个暴力匹配器Blute-Force (BF) matcher
bf = cv2.BFMatcher()
while self.vidcap.isOpened():
ret, frame = self.vidcap.read()
# 关键点(kp)检测和计算描述符(des)
kp, des = self.feature_detector.detectAndCompute(frame, None)
# 在关键点之间应用knn匹配
matches = bf.knnMatch(self.des0, des, k=2)
# 根据阈值筛选关键特征点
# good = [[m] for m, n in matches if m.distance < self.ratio * n.distance]
good = []
for m, n in matches:
if m.distance < self.ratio * n.distance:
good.append([m])
print('len',len(good))
contours = []
# 查找单应性矩阵
if (len(good) > self.min_match_count) and self.show_rectangle:
# 建立坐标矩阵
src_pts = np.float32([self.kp0[m[0].queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp[m[0].trainIdx].pt for m in good]).reshape(-1, 1, 2)
# 计算多个二维点对之间的最优单映射变换矩阵 H
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
# Assume color camera
# cv2.imshow('queryimg',self.queryimg)
h, w, c = self.queryimg.shape
pts = np.float32([[0, 0], [0, h-1], [w-1, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
# cv2.circle(frame,tuple(dst_pts[0][0]),5, (255,0,0))
# cv2.circle(frame, tuple(dst_pts[1][0]), 5, (0, 255, 0))
# cv2.circle(frame, tuple(dst_pts[2][0]), 5, (0, 0, 255))
# cv2.circle(frame, tuple(dst_pts[3][0]), 5, (255, 255, 0))
# cv2.imshow('circle', frame)
frame = cv2.polylines(frame, [np.int32(dst)], True, (0, 255, 0), 2, cv2.LINE_AA)
# 可视化匹配过程
# 绘画参数
# draw_params = dict(flags=2)
draw_params = dict(matchColor=(0, 255, 0), singlePointColor=(0, 0, 255),flags=0)
img = cv2.drawMatchesKnn(self.queryimg, self.kp0, frame, kp, good, None, **draw_params)
cv2.imshow("Detection (press 'q' to quit)", img)
key_pressed = cv2.waitKey(1)
if key_pressed & 0xFF == ord('q'):
break
if key_pressed & 0xFF == ord('h'):
self.show_rectangle = False
def close(self):
""" 释放VideoCapture并销毁windows """
self.vidcap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
obj_detector = ObjectDetector()
obj_detector.register()
obj_detector.detect()
obj_detector.close()
测试效果,如下:

[OpenCV]基于特征匹配的实时平面目标检测算法的更多相关文章
- 基于候选区域的深度学习目标检测算法R-CNN,Fast R-CNN,Faster R-CNN
参考文献 [1]Rich feature hierarchies for accurate object detection and semantic segmentation [2]Fast R-C ...
- 使用Harr特征的级联分类器实现目标检测
前言 最近在学习人脸的目标检测任务时,用了Haar人脸检测算法,这个算法实现起来太简洁了,读入个.xml,调用函数就能用.但是深入了解我发现这个算法原理很复杂,也很优秀.究其根源,于是我找了好些篇相 ...
- 转载:点云上实时三维目标检测的欧拉区域方案 ----Complex-YOLO
感觉是机器翻译,好多地方不通顺,凑合看看 原文名称:Complex-YOLO: An Euler-Region-Proposal for Real-time 3D Object Detection ...
- 基于模糊Choquet积分的目标检测算法
本文根据论文:Fuzzy Integral for Moving Object Detection-FUZZ-IEEE_2008的内容及自己的理解而成,如果想了解更多细节,请参考原文.在背景建模中,我 ...
- 基于深度学习的目标检测算法:SSD——常见的目标检测算法
from:https://blog.csdn.net/u013989576/article/details/73439202 问题引入: 目前,常见的目标检测算法,如Faster R-CNN,存在着速 ...
- CVPR2020|3D-VID:基于LiDar Video信息的3D目标检测框架
作者:蒋天园 Date:2020-04-18 来源:3D-VID:基于LiDar Video信息的3D目标检测框架|CVPR2020 Brief paper地址:https://arxiv.org/p ...
- 29 基于PCL的点云平面分割拟合算法技术路线(针对有噪声的点云数据)
0 引言 最近项目中用到了基于PCL开发的基于平面的点云和CAD模型的配准算法,点云平面提取采用的算法如下. 1 基于PCL的点云平面分割拟合算法 2 参数及其意义介绍 (1)点云下采样 1. 参数: ...
- 基于COCO数据集验证的目标检测算法天梯排行榜
基于COCO数据集验证的目标检测算法天梯排行榜 AP50 Rank Model box AP AP50 Paper Code Result Year Tags 1 SwinV2-G (HTC++) 6 ...
- 目标检测算法的总结(R-CNN、Fast R-CNN、Faster R-CNN、YOLO、SSD、FNP、ALEXnet、RetianNet、VGG Net-16)
目标检测解决的是计算机视觉任务的基本问题:即What objects are where?图像中有什么目标,在哪里?这意味着,我们不仅要用算法判断图片中是不是要检测的目标, 还要在图片中标记出它的位置 ...
随机推荐
- [php代码审计] Typecho 1.1 -反序列化Cookie数据进行前台Getshell
环境搭建 源码下载:https://github.com/typecho/typecho/archive/v1.1-15.5.12-beta.zip 下载后部署到web根目录,然后进行安装即可,其中注 ...
- [转] Java中对数据进行加密的几种方法
加密算法有很多种:这里只大约列举几例: 1:消息摘要:(数字指纹):既对一个任意长度的一个数据块进行计算,产生一个唯一指纹.MD5/SHA1发送给其他人你的信息和摘要,其他人用相同的加密方法得到摘要, ...
- Oracle之DBMS_LOCK包用法详解
概述与背景 某些并发程序,在高并发的情况下,必须控制好并发请求的运行时间和次序,来保证处理数据的正确性和完整性.对于并发请求的并发控制,EBS系统可以通过Concurrent Program定义界面的 ...
- Linux基础命令---mysqladmin数据库管理工具
mysqladmin mysqladmin是mysql数据库的管理工具,可以控制.查看.修改数据库服务器的配置和状态. 此命令的适用范围:RedHat.RHEL.Ubuntu.CentOS.Fedor ...
- Hibernate 总结(转)
JMX:Java Management Extensions.JCA: J2EE Contector ArchitectureJNDI: Java Namind and Directory Inter ...
- jquery:iframe里面的元素怎样触发父窗口元素的事件?
例如父窗口定义了一个事件. top: $(dom1).bind('topEvent', function(){}); 那么iframe里面的元素怎样触发父窗口dom1的事件呢?这样吗? $(dom1, ...
- 【C/C++】最长公共子序列(LCS)/动态规划
晴神这个的最巧妙之处,在于用dp[i][0] = dp[0][j] = 0的边界条件 这样从1的下标开始填数组的时候,递推公式dp[i-1][j-1]之类的不会报错 #include <iost ...
- C++STL标准库学习笔记(四)multiset续
自定义排序规则的multiset用法 前言: 在这个笔记中,我把大多数代码都加了注释,我的一些想法和注解用蓝色字体标记了出来,重点和需要关注的地方用红色字体标记了出来,只不过这一次的笔记主要是我的补充 ...
- Jenkins获取发版人的人名
目录 一.简介 二.自由风格使用 三.pipeline使用 脚本式 声明式 一.简介 Jenkins在构建记录中,是可以看到谁点的构建的,但pipeline中的全局变量,默认是不支持获取当前构建任务的 ...
- 车载以太网第二弹 | 测试之实锤-物理层PMA测试实践
前言 本期先从物理层"PMA测试"开始,下图1为"PMA测试"的测试结果汇总图.其中,为了验证以太网通信对线缆的敏感度,特选取两组不同特性线缆进行测试对比,果然 ...