OpenCV常用基本处理函数(4)简单变换,阈值等
几何变换
缩放
img=cv2.imread('messi5.jpg')
# 下面的 None 本应该是输出图像的尺寸,但是因为后边我们设置了缩放因子
# 因此这里为 None
res=cv2.resize(img,None,fx=2,fy=2,interpolation=cv2.INTER_CUBIC)
#OR
# 这里呢,我们直接设置输出图像的尺寸,所以不用设置缩放因子
height,width=img.shape[:2]
res=cv2.resize(img,(2*width,2*height),interpolation=cv2.INTER_CUBIC)
旋转
img=cv2.imread('messi5.jpg',0)
rows,cols=img.shape
# 这里的第一个参数为旋转中心,第二个为旋转角度,第三个为旋转后的缩放因子
# 可以通过设置旋转中心,缩放因子,以及窗口大小来防止旋转后超出边界的问题
M=cv2.getRotationMatrix2D((cols/2,rows/2),45,0.6)
# 第三个参数是输出图像的尺寸中心
dst=cv2.warpAffine(img,M,(2*cols,2*rows))
仿射变换
仿射变换有旋转 (线性变换),平移 (向量加).缩放(线性变换),错切,反转;
仿射变换是一种二维坐标到二维坐标之间的线性变换,它保持了二维图形的“平直性”(直线经过变换之后依然是直线)和“平行性”(二维图形之间的相对位置关系保持不变,平行线依然是平行线,且直线上点的位置顺序不变)
基本步骤是这样的:
1.图像都是由矩阵来表示;
2.得到变换矩阵的几种方法,
(1)cv2.getRotationMatrix2d()得到旋转矩阵或者放缩,
(2)通过点来表示;三个点的和四个点的,cv2.getAffineTransform和cv2.getPerspectiveTransform
这里举一个三个点的例子;
img = cv2.imread('dog.jpg')
rows,cols,_ = img.shape
points1 = np.float32([[50,50],[200,50],[50,200]])
points2 = np.float32([[10,100],[200,50],[100,250]])
matrix = cv2.getAffineTransform(points1,points2)
output = cv2.warpAffine(img,matrix,(cols,rows))
3.变换函数来得到结果图像;
OpenCV 提供了两个变换函数,cv2.warpAffine 和 cv2.warpPerspective,使用这两个函数你可以实现所有类型的变换。cv2.warpAffine 接收的参数是2 × 3 的变换矩阵,而 cv2.warpPerspective 接收的参数是 3 × 3 的变换矩阵。
仿射变换一般通过函数cvWrapAffine(src,dst,mat)实现,其中mat是2x3的仿射矩阵,该矩阵可以利用函数cvGetAffineTransform(srcTri,dstTri,mat)得到,其中mat是被该函数填充的仿射矩阵,srcTri和dstTri分别是由三个顶点定义的平行四边形
具体的图像变换解释参考这里:
https://blog.csdn.net/qq_27261889/article/details/80720359
透视变换
透视变换是将图片投影到一个新的视平面,也称作投影映射.它是二维(x,y)到三维(X,Y,Z),再到另一个二维(x’,y’)空间的映射.
相对于仿射变换,它提供了更大的灵活性,将一个四边形区域映射到另一个四边形区域
仿射变换是透视变换的一种特殊情况.它把二维转到三维,变换后,再转映射回之前的二维空间
在OpenCV中,透视变换通过函数cvWrapPerspective(src,dst,mat)实现, 与仿射变换不同的是,透视矩阵是一个3x3的矩阵,在计算矩阵时,可利用函数cvGetPerspectiveTransform(srcQuad,dstQuad,mat),由于不再是平行四边形,需要提供四边形的四个顶点
详细讲解在参考这里:
https://blog.csdn.net/flyyufenfei/article/details/80208361
仿射变换可以叫做平面变换,透视变换可以叫做空间变换。
图像阈值
1.简单阈值,通过cv2.threshold来对图像的某些高于或低于一个阈值的像素点进行操作;
这个函数的第一个参数就是原图像,原图像应该是灰度图。第二个参数就是用来对像素值进行分类的阈值。第三个参数就是当像素值高于(有时是小于)阈值时应该被赋予的新的像素值。OpenCV提供了多种不同的阈值方法,这是有第四个参数来决定的
2.自适应阈值,
cv2.adaptiveThreshold
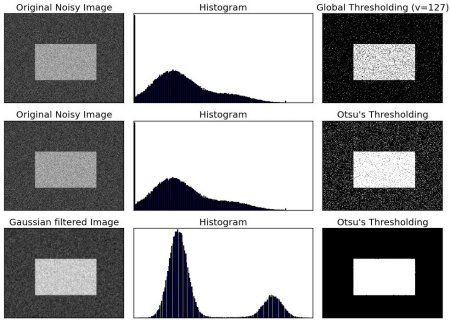
当同一幅图像上的不同部分的具有不同亮度时。这种情况下我们需要采用自适应阈值。此时的阈值是根据图像上的每一个小区域计算与其对应的阈值 Otsu 二值化
简单来说就是对一副双峰图像自动根据其直方图计算出一个阈值(对于非双峰图像,这种方法得到的结果可能会不理想)
采用高斯核去噪之后,图像变为一个双峰图像,然后再采用otsu二值化处理之后的原噪声图像变成了下面的样子:第一个为简单阈值,第二个为0自适应阈值,第三个加了高斯去噪;
参考自:https://www.cnblogs.com/Undo-self-blog/p/8436389.html
OpenCV常用基本处理函数(4)简单变换,阈值等的更多相关文章
- OpenCV常用数据结构和函数
点的表示:Point类 Point类数据结构表示二维坐标系下的点,即由其图像坐标x,y指定的2D点. 用法如下 Point point; point.x = 10; point.y = 8; 或者 P ...
- [opencv]常用阵列操作函数总结
/*=========================================================================*/ // 阵列操作 /*============ ...
- OpenCV常用基本处理函数(8)图像变换
傅里叶变换 傅里叶变换在实际中有非常明显的物理意义,设f是一个能量有限的模拟信号,则其傅里叶变换就表示f的频谱. 图像的频率是表征图像中灰度变化剧烈程度的指标,是灰度在平面空间上的梯度.如:大面积的沙 ...
- OpenCV常用基本处理函数(7)图像金字塔和直方图
高斯金字塔 高斯金字塔的顶部是通过将底部图像中的连续的行和列去除得到的.顶部图像中的每个像素值等于下一层图像中 5 个像素的高斯加权平均值. 这样操作一次一个 MxN 的图像就变成了一个 M/2xN/ ...
- OpenCV常用基本处理函数(6)图像梯度
形态学转换 腐蚀 img = cv2.imread() kernel = np.ones((,),np.uint8) erosion = cv2.erode(img,kernel,iterations ...
- OpenCV常用基本处理函数(5)图像模糊
2D卷积操作 cv.filter2D() 可以让我们对一幅图像进行卷积操作, 图像模糊(图像平滑)使用低通滤波器可以达到图像模糊的目的.这对与去除噪音很有帮助.其实就是去除图像中的高频成分(比如:噪音 ...
- OpenCV常用基本处理函数(3)颜色空间
颜色空间转换 对图像进行颜色空间转换,比如从 BGR 到灰度图,或者从BGR 到 HSV 等 我们要用到的函数是:cv2.cvtColor(input_image ,flag),其中 flag就是转换 ...
- OpenCV常用基本处理函数(2)图像基本操作
可以根据像素的行和列的坐标获取他的像素值.对 BGR 图像而言,返回值为 B,G,R 例如获取蓝色的像素值: img=cv2.imread('messi5.jpg')px=img[100,100]bl ...
- OpenCV常用基本处理函数(1)读写
图像的基本操作 cv.imread() 读取图片 cv.imshow() 显示图片 cv2.imwrite() 保存图像 使用摄像头捕获实时图像 OpenCV 为这中应用提供了 ...
随机推荐
- Java打印流学习
打印流 打印流的主要功能是用于输出,在整个IO包打印流分为两种类型,打印流可以很方便的进行输出. 1.字节打印流:PrintStream(在字节输出时,可以增强输出功能) 2.字符打印流:PrintW ...
- 在Eclipse中配置安卓的开发环境 (踩过的坑)
这个学期学校有门安卓程序设计课需要安装安卓开发环境. 一开始安装的是Andriod Studio,但是过程很坎坷很心酸,遇到各种各样的问题,最后还没有解决. 没办法决定用Eclipse配置安卓环境,虽 ...
- Vue-Router原理
Hash 与 History 路由原理 实现路由 /** * 1.前端路由与后端路由的区别 后端路由: 输入url => 请求发送到服务器 => 服务器解析请求路径 => 拿到对应页 ...
- php基于SQLite实现的分页功能示例
php基于SQLite实现的分页功能. 这里操作数据库文件使用的是前面文章<PHP基于PDO实现的SQLite操作类>中的SQLite数据库操作类. 代码: <?php class ...
- LOJ 2980 「THUSCH 2017」大魔法师——线段树
题目:https://loj.ac/problem/2980 线段树维护矩阵. 然后是 30 分.似乎是被卡常了?…… #include<cstdio> #include<cstri ...
- Python操作 Memcache
Memcached Memcached 是一个高性能的分布式内存对象缓存系统,用于动态Web应用以减轻数据库负载.它通过在内存中缓存数据和对象来减少读取数据库的次数,从而提高动态.数据 库驱动网站的速 ...
- Houdini学习笔记——【一】散落苹果
[案例一]散落的苹果 0.渲染 1.sop使用 - 苹果主体:curve绘制刨面曲线,revolve车削得到苹果主体,uvtexture来调整uv,convert继续转换为polygon,fuse缝合 ...
- Linux:主设备号和次设备号
http://www.linuxidc.com/Linux/2011-03/33863.htm Linux的设备管理是和文件系统紧密结合的,各种设备都以文件的形式存放在/dev目录下,称为设备 ...
- shell脚本——注释(单行注释 多行注释)
参考 : https://blog.csdn.net/weixin_42167759/article/details/80703570 单行注释 以"#"开头的行就是注释,会被解释 ...
- opencv中图像的读取,显示与保存1
1.读入图像 用cv2.imread()函数来读取图像,cv2.imread(路径,图像颜色空间)(其中颜色空间默认为BGR彩图) cv2.IMREAD_COLOR:读入一副彩色图像 cv2. ...