CANoe学习笔记(三):CANoe的诊断功能和cdd文件
内容:
UDS诊断学习
CDD文件配置
诊断功能
一、UDS诊断学习:
①、UDS请求命令4种构成方式:
SID
SID+SF(Sub-function)
SID+DID(Data Identifier)(读写用)
SID+SF+DID
其中安全标识符(Security Identifiers,SID),服务ID值($10、$27那种)
SF(Sub-function):子功能
DID:应该指具体读取哪一个寄存器的值。
②、常见的NRC(响应码)
0x11表示服务不支持;
0x12 subfunction不支持;
0x13 请求的长度不正确,或者格式不正确;
0x31 是请求超出范围;
0x33 安全拒绝
0x35 无效的秘钥
0x7E 是在当前会话下subfunction不支持;(应该是权限不够)
0x7F 是在当前会话下服务不支持。(应该是权限不够)
特殊NRC:78(RCRRP):表明请求消息被正确地接收,请求消息中的所有参数都是有效的,但是要执行的操作还没有完成,等待Server完成后,会重新发送NRC。
③、N_PUD类型
包含PCI+SDU(协议信息+数据单元)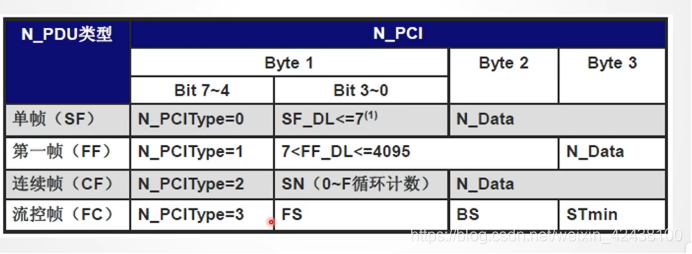
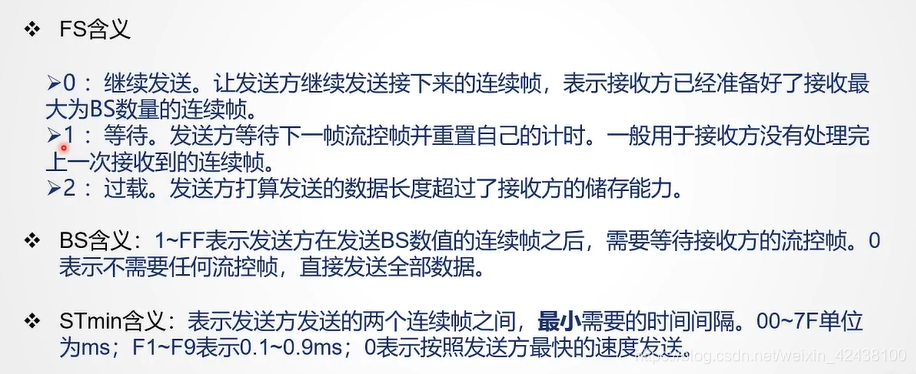
STmin:体现了接收方的处理能力,处理CAN接收的速度
BS:体现了接收方的接收能力:软件buffer的大小
④常用的诊断服务
结合同事与网上资料,重点掌握以下11个
$10 Diagnostic Session Control(诊断会话)
$11 EcuReset(ECU复位)
$27 Security Access(安全访问)
$3E Tester Present(待机握手)。
$22 Read Data By Identifier(通过ID读数据)
$2E Write Data By Identifier(通过ID写数据)
$14 Clear Diagnostic Information(清除诊断信息)
$19 Read DTC Information(读取故障码信息)
$34 Request Download(请求下载)
$36 Transfer Data(数据传输)
$37 Request Transfer Exit(请求退出传输)
二、CDD文件配置:
先打开CANoe自带的CANdelaStudio:

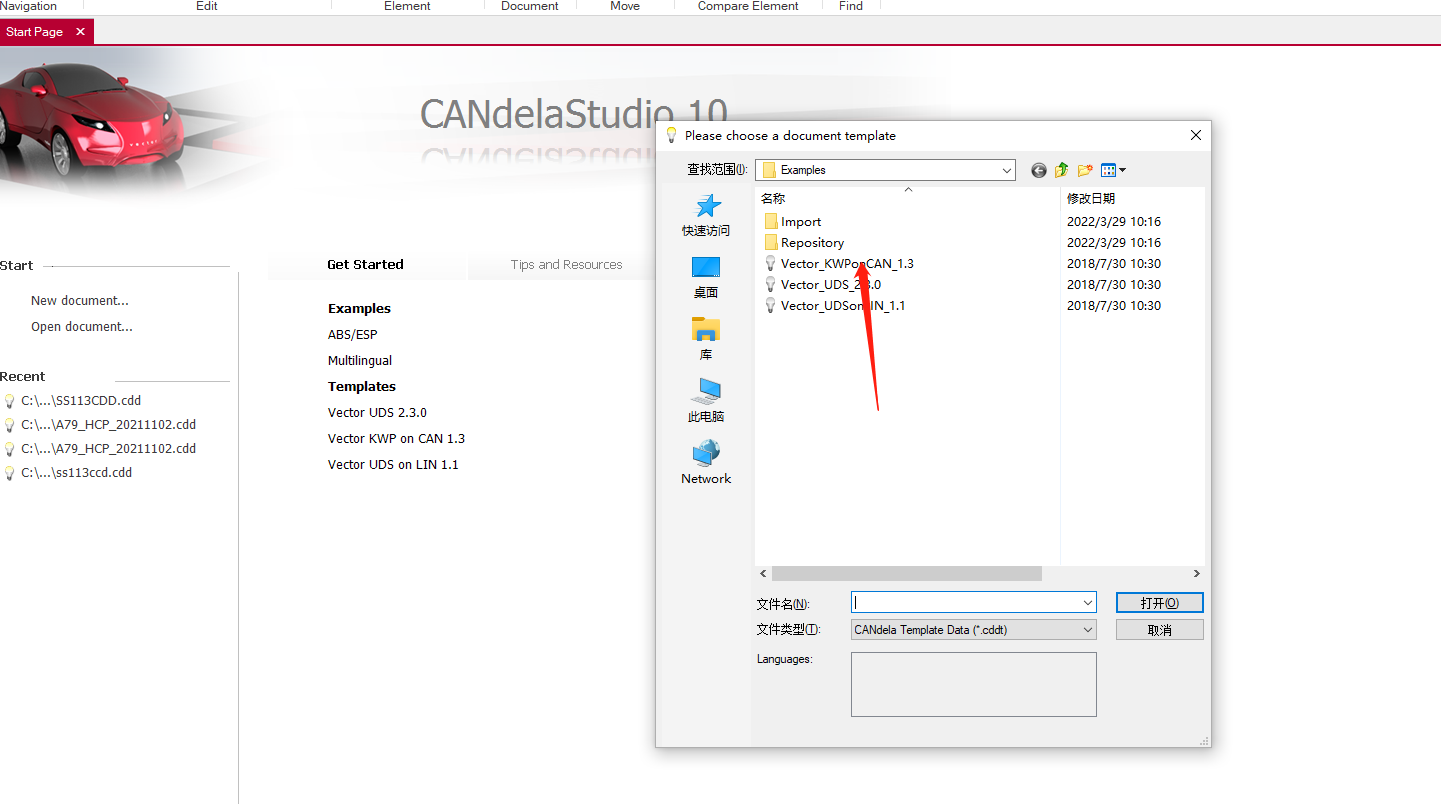
然后新建一个cdd文件,一般CANoe会自带一些模板,我这里选的是CAN的
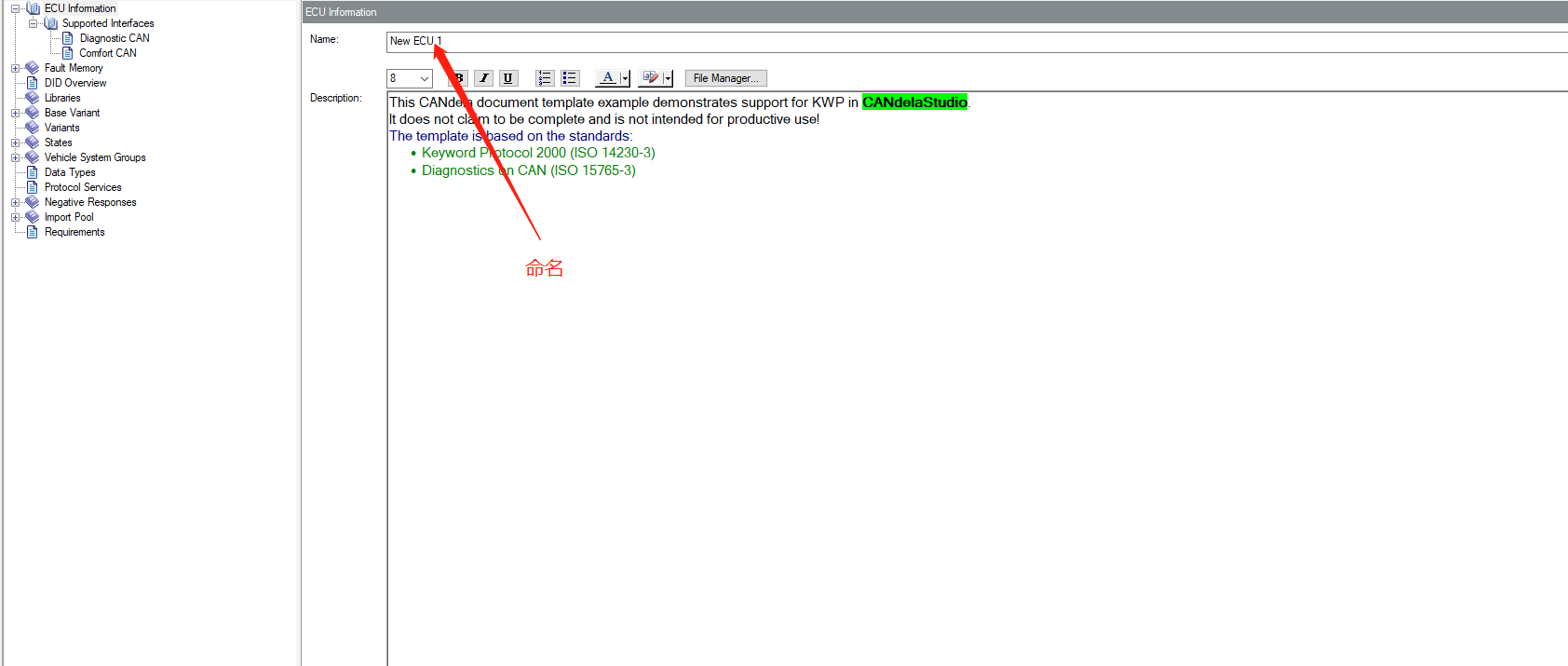
下面就说一些一般用得到的:
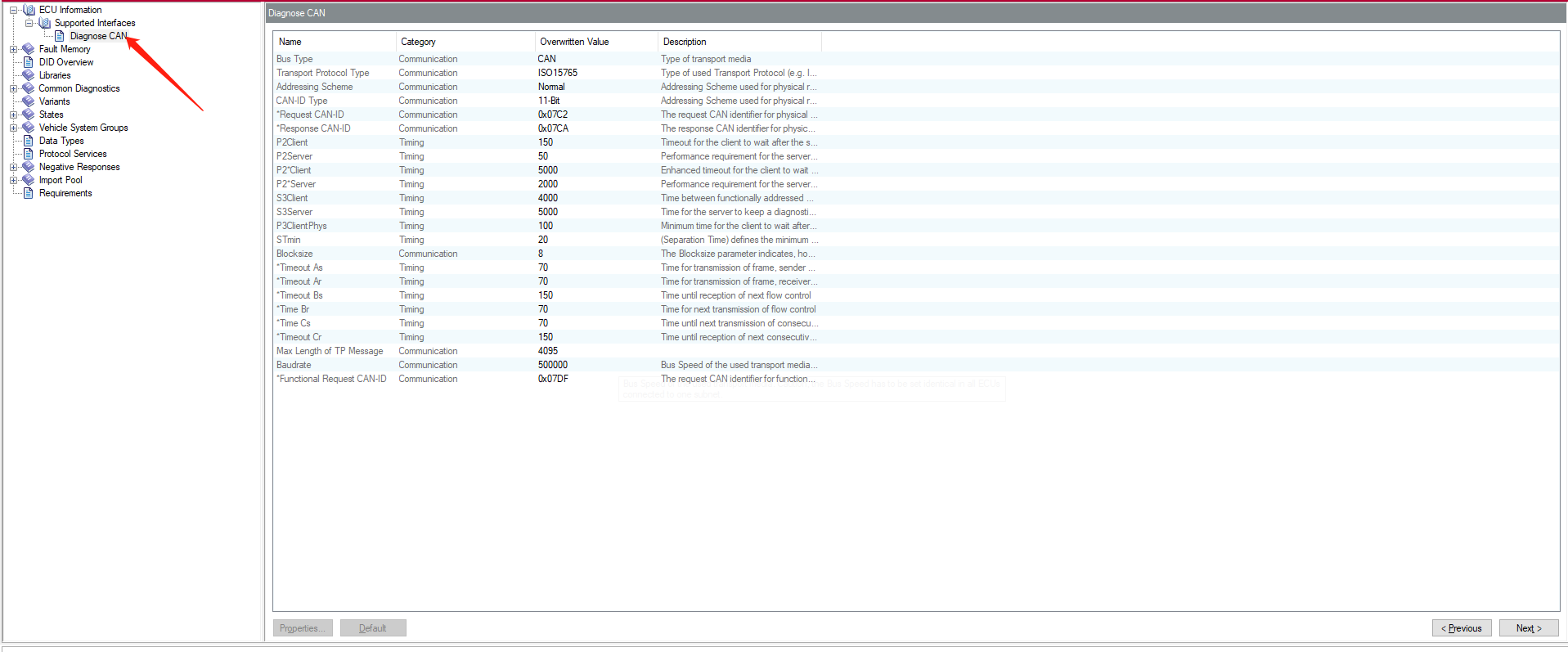
这个是看提供的诊断调查表里的数据填好(主要是ID,其他和我一样好像也可以):
补充:这一部分的配置请看厂商提供的文件,这只是个例子
这个界面是用来定义一些DTC(一般会提供的):
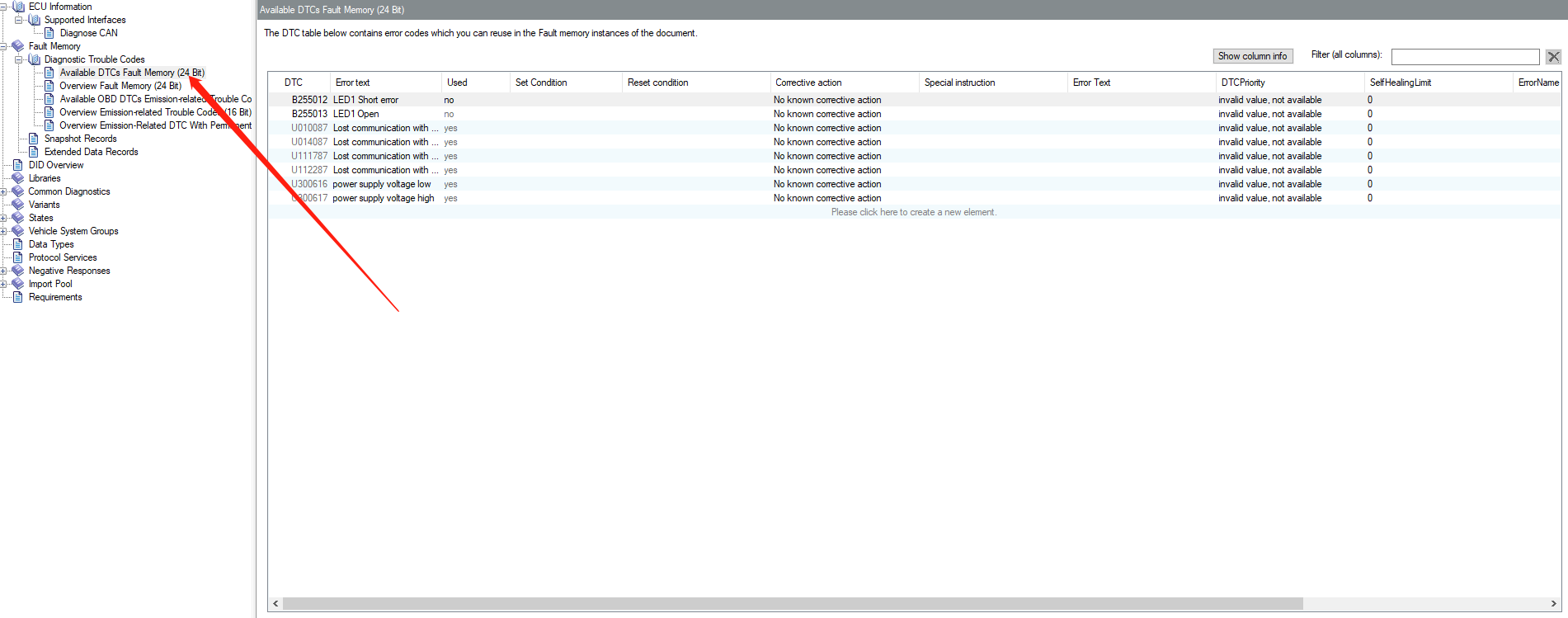
然后在这个界面导入到表格:
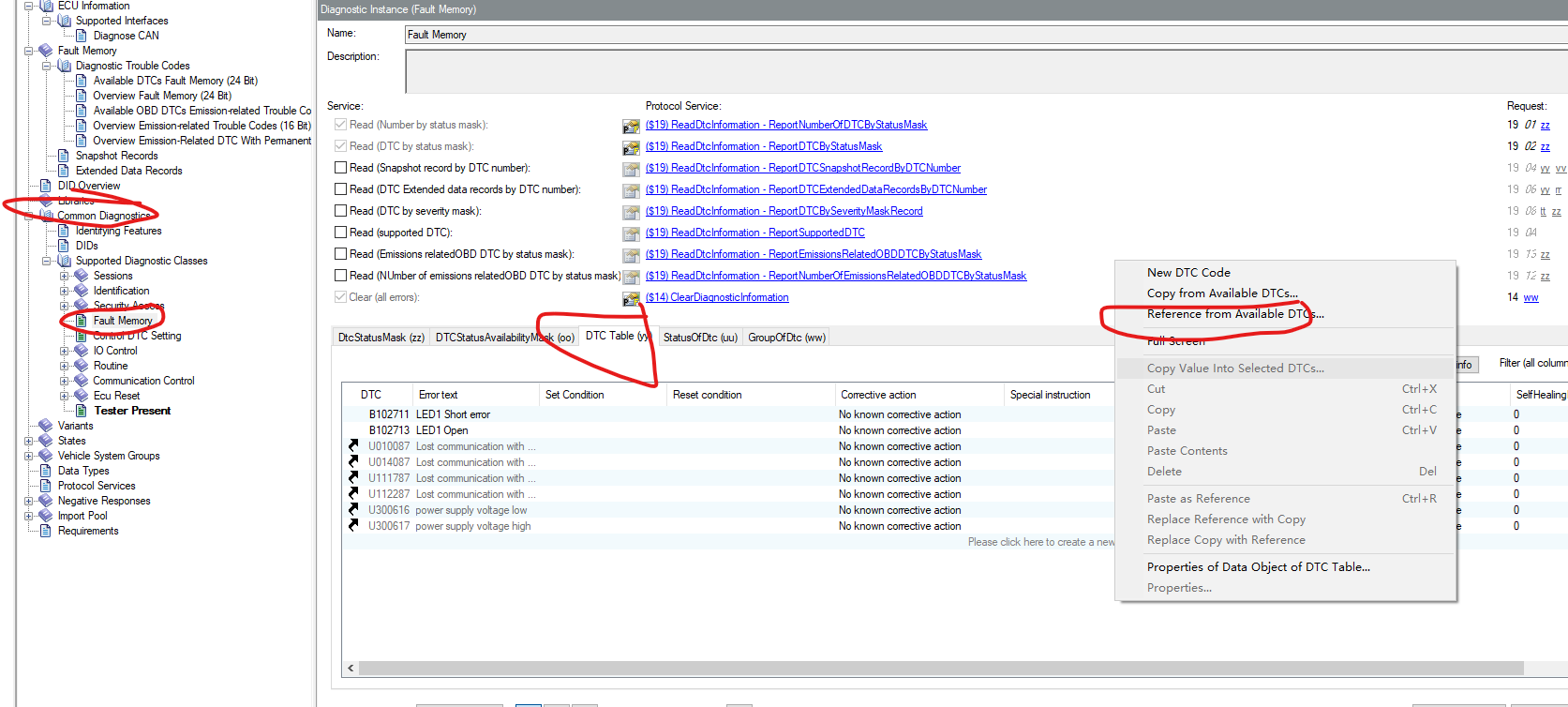
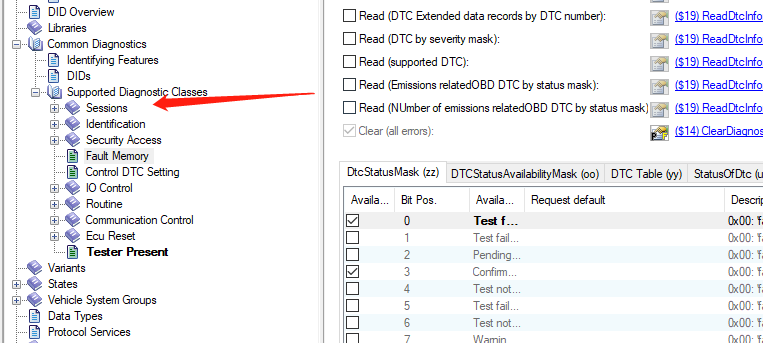
这个是根据是否支持勾选的:
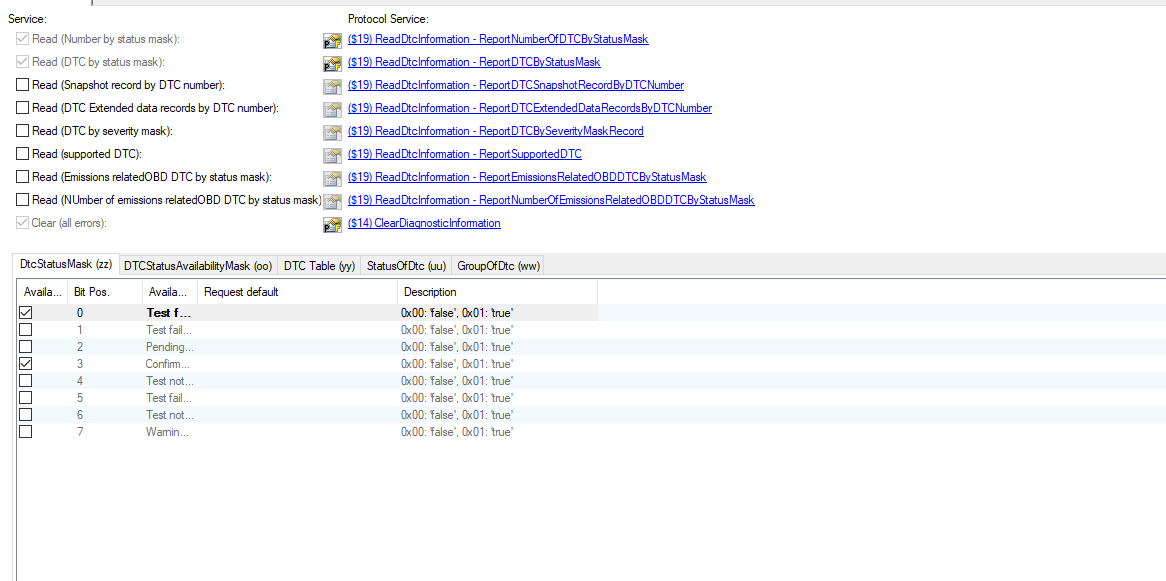
这些书籍图标的都是定义的服务类型,如22,2E等,根据提供的诊断调查表来定义
好像也没什么要弄得了,目前就琢磨到了这一步,后续可能用到在记录吧~
然后保存好。。。。
回到主界面:
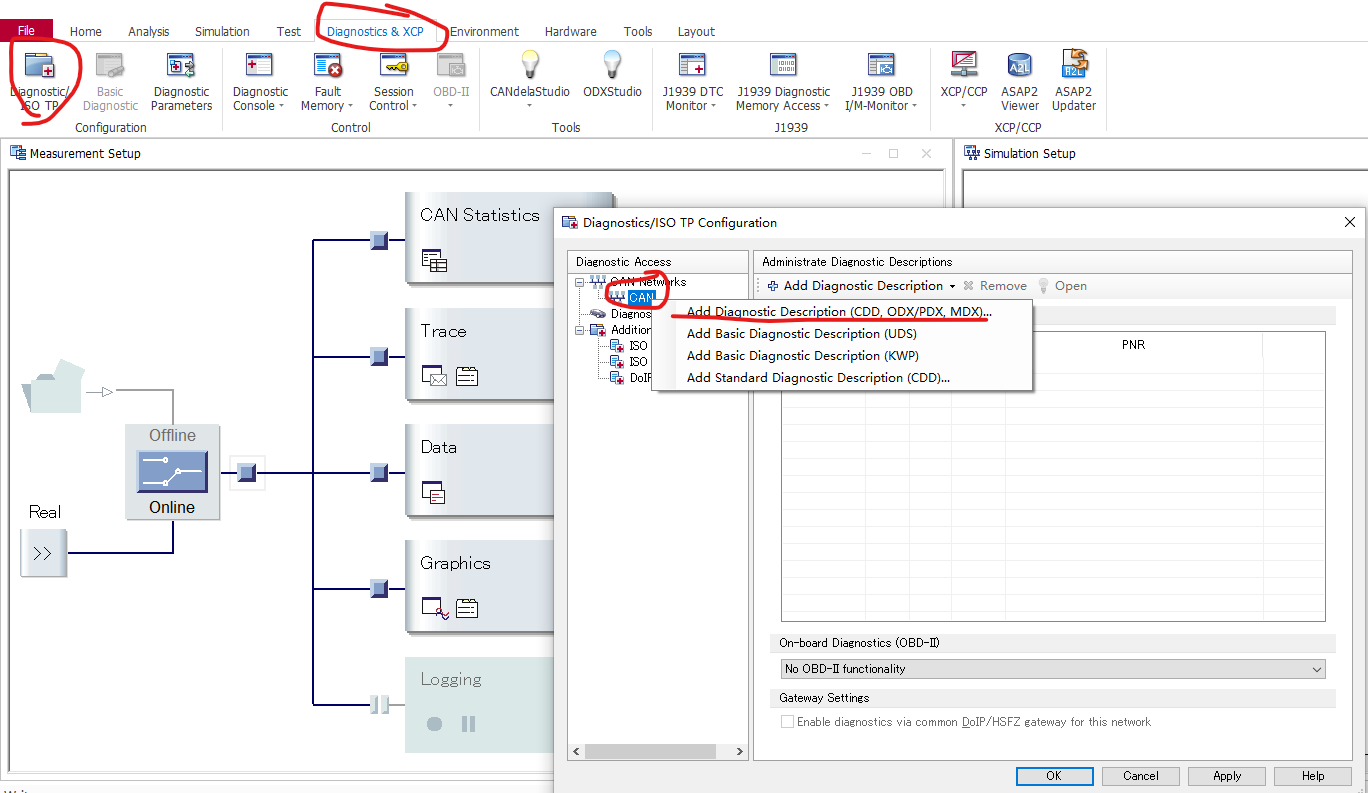
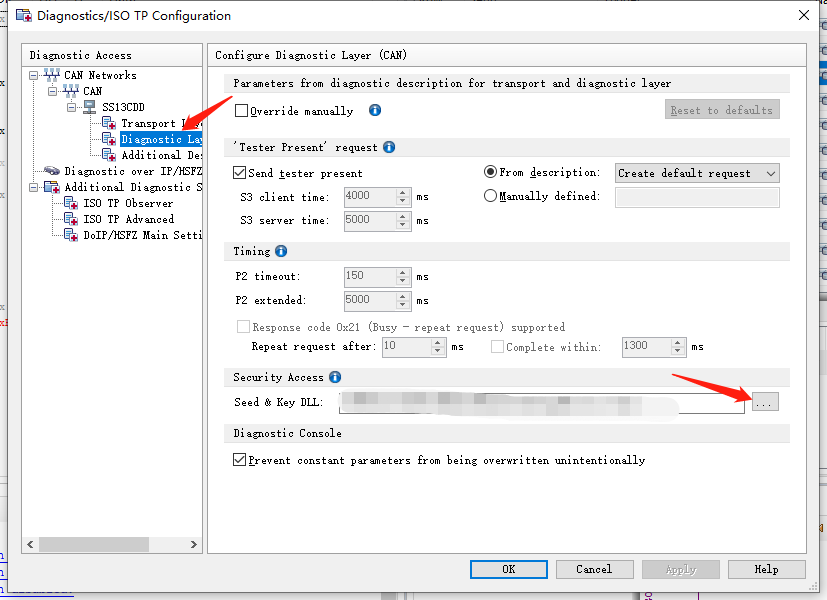
测试一般就用不到安全算法文件咯,导入之后点击ok:
补充:需要安全算法的,一般会提供.dll文件,在这个位置添加就好了,这个文件一般用与27服务的安全会话。
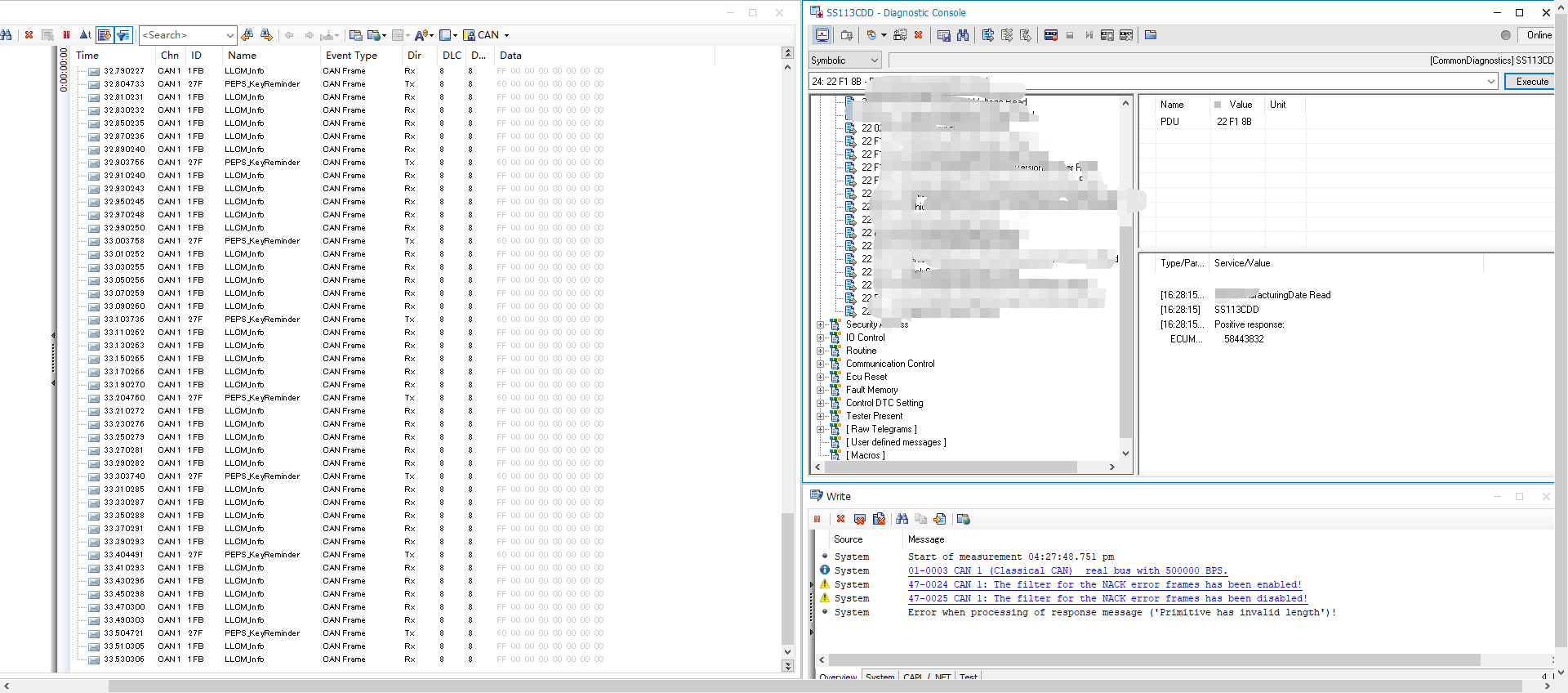
在右边的Console窗口双击一条指令就可以发送啦!成功!
CANoe学习笔记(三):CANoe的诊断功能和cdd文件的更多相关文章
- 物联网学习笔记三:物联网网关协议比较:MQTT 和 Modbus
物联网学习笔记三:物联网网关协议比较:MQTT 和 Modbus 物联网 (IoT) 不只是新技术,还是与旧技术的集成,其关键在于通信.可用的通信方法各不相同,但是,各种不同的协议在将海量“事物”连接 ...
- [Firefly引擎][学习笔记三][已完结]所需模块封装
原地址:http://www.9miao.com/question-15-54671.html 学习笔记一传送门学习笔记二传送门 学习笔记三导读: 笔记三主要就是各个模块的封装了,这里贴 ...
- VSTO学习笔记(三) 开发Office 2010 64位COM加载项
原文:VSTO学习笔记(三) 开发Office 2010 64位COM加载项 一.加载项简介 Office提供了多种用于扩展Office应用程序功能的模式,常见的有: 1.Office 自动化程序(A ...
- Java IO学习笔记三
Java IO学习笔记三 在整个IO包中,实际上就是分为字节流和字符流,但是除了这两个流之外,还存在了一组字节流-字符流的转换类. OutputStreamWriter:是Writer的子类,将输出的 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) 补充 hector_slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- Typescript 学习笔记三:函数
中文网:https://www.tslang.cn/ 官网:http://www.typescriptlang.org/ 目录: Typescript 学习笔记一:介绍.安装.编译 Typescrip ...
- muduo网络库学习笔记(三)TimerQueue定时器队列
目录 muduo网络库学习笔记(三)TimerQueue定时器队列 Linux中的时间函数 timerfd简单使用介绍 timerfd示例 muduo中对timerfd的封装 TimerQueue的结 ...
- MYSQL学习笔记三:日期和时间函数
MYSQL学习笔记三:日期和时间函数 1. 获取当前日期的函数和获取当前时间的函数 /*获取当前日期的函数和获取当前时间的函数.将日期以'YYYY-MM-DD'或者'YYYYMMDD'格式返回 */ ...
- Oracle学习笔记三 SQL命令
SQL简介 SQL 支持下列类别的命令: 1.数据定义语言(DDL) 2.数据操纵语言(DML) 3.事务控制语言(TCL) 4.数据控制语言(DCL)
随机推荐
- 第一部分:介绍 Spdlog 日志库
什么是 Spdlog 日志库 Spdlog 是一个 C++ 的日志库,它具有高效.易用.跨平台等特点.它可以写入到控制台.文件等输出目标,支持多种日志级别.多线程安全等功能,非常适合在 C++ 项目中 ...
- go简易tcp/udp连接测试工具
package main import ( "fmt" "io" "log" "net" "os" ...
- 集合-HashMap 源码详细分析(JDK1.8)
1. 概述 本篇文章我们来聊聊大家日常开发中常用的一个集合类 - HashMap.HashMap 最早出现在 JDK 1.2中,底层基于散列算法实现.HashMap 允许 null 键和 null 值 ...
- 免费注册 Redhat 开发者并且进行订阅和激活
注册 一.进入 https://www.redhat.com/wapps/ugc/register.html 进行注册 二.然后通过这个网址进入开发者平台 https://developers.red ...
- pandas之excel操作
Excel 是由微软公司开发的办公软件之一,它在日常工作中得到了广泛的应用.在数据量较少的情况下,Excel 对于数据的处理.分析.可视化有其独特的优势,因此可以显著提升您的工作效率.但是,当数据量非 ...
- 9.springSecurity整合OAuth2结合Jwt实现单点登录
1.总结:昨天主要是继续完善OAuth2配合将问题完成单点登录,昨天也应证了一个认证服务,两个客户端服务在登陆一次后可以访问两个客户端的页面,也算是完成了单点登录 2.具体实现 首先是使用java ...
- Docker介绍下载安装、制作镜像及容器、做目录映射、做端口映射
在计算机中,虚拟化(英语:Virtualization)是一种资源管理技术,是将计算机的各种实体资源,如服务器.网络.内存及存储等,予以抽象.转换后呈现出来,打破实体结构间的不可切割的障碍,使用户可以 ...
- 天梯赛L1-027 出租
一.问题描述 下面是新浪微博上曾经很火的一张图: 一时间网上一片求救声,急问这个怎么破.其实这段代码很简单,index数组就是arr数组的下标,index[0]=2 对应 arr[2]=1,index ...
- 深度学习02-03(图像处理、OpenCV实验案例)
OpenCV实验案例 文章目录 OpenCV实验案例 一.OpenCV安装 1. OpenCV介绍 2. 安装 二.OpenCV基本操作 1. 图像读取与保存 1)读取.图像.保存图像 2. 图像色彩 ...
- 收藏!最全Linux思维导图
收藏!最全Linux思维导图 目录 收藏!最全Linux思维导图 1. 认识 Linux 2. Linux 命令 3. Linux学习路径 4. Linux 桌面介绍 5. FHS:文件系统目录标准 ...