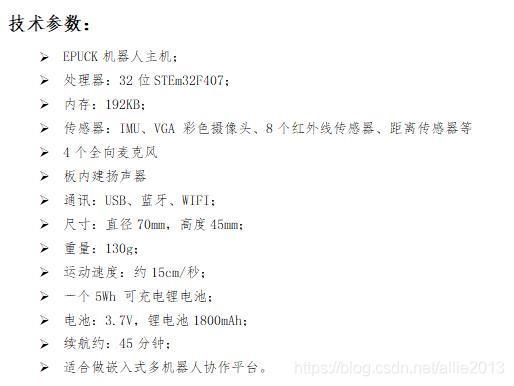
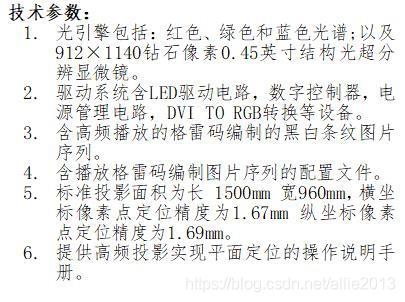
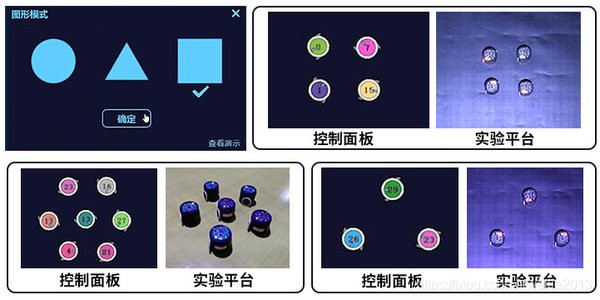
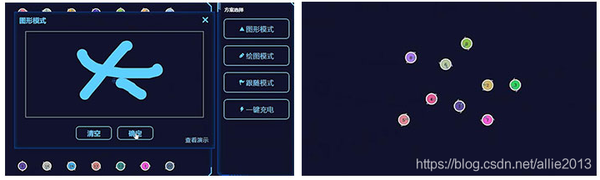
基于E-PUCK 2.0多智能体自主协同 高频投影定位系统






基于E-PUCK 2.0多智能体自主协同 高频投影定位系统的更多相关文章
- 基于ROBO-MAS多智能体自主协同 高频投影定位系统
- 伯克利推出「看视频学动作」的AI智能体
伯克利曾经提出 DeepMimic框架,让智能体模仿参考动作片段来学习高难度技能.但这些参考片段都是经过动作捕捉合成的高度结构化数据,数据本身的获取需要很高的成本.而近日,他们又更进一步,提出了可以直 ...
- TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- DRL 教程 | 如何保持运动小车上的旗杆屹立不倒?TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- STM32W108无线传感器网络节点自组织与移动智能体导航技术
使用STM32W108无线开发板及节点完毕大规模网络的自组建,网络模型选择树型,网络组建完毕之后,使用基于接收信号强度指示RSSI(ReceivedSignal Strength Indication ...
- NVIDIA DeepStream 5.0构建智能视频分析应用程序
NVIDIA DeepStream 5.0构建智能视频分析应用程序 无论是要平衡产品分配和优化流量的仓库,工厂流水线检查还是医院管理,要确保员工和护理人员在照顾病人的同时使用个人保护设备(PPE),就 ...
- 基于STM32+华为云IOT设计智能称重系统
摘要:选择部署多个重量传感器和必要的算法.通过WiFi 通信模块.GPS定位模块,采集车辆称重数据一地理位置信息,并通过网络发送至云平台,设计图形化UI界面展示称重.地图位置等重要信息,实现对称重系统 ...
- 基于Visual C++6.0的DLL编程实现
整理自基于Visual C++6.0的DLL编程实现 本文通过通俗易懂的方式,全面介绍了动态链接库的概念.动态链接库的创建和动态链接库的链接,并给出个简单明了的例子,相信读者看了本文后,能够创建自己的 ...
- iKcamp出品|微信小程序|工具安装+目录说明|基于最新版1.0开发者工具初中级教程分享
iKcamp官网:http://www.ikcamp.com 访问官网更快阅读全部免费分享课程:<iKcamp出品|全网最新|微信小程序|基于最新版1.0开发者工具之初中级培训教程分享>. ...
随机推荐
- 第7.19节 Python中的抽象类详解:abstractmethod、abc与真实子类
第7.19节 Python中的抽象类详解:abstractmethod.abc与真实子类 一. 引言 前面相关的章节已经介绍过,Python中定义某种类型是以实现了该类型对应的协议为标准的,而不 ...
- 第十二章、Designer中的menu菜单、toolBar工具栏和Action动作
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 一.引言 Qt Designer中的部件栏并没有菜单.toolBar以及Action相关的部件,仅在 ...
- PyQt(Python+Qt)学习随笔:Qt Designer中窗口对象的windowFilePath属性
windowFilePath属性仅对窗口对象有效,用于关联一个窗口和对应的文件及路径. 当窗口没有设置标题属性的情况下,则窗口标题展示展示windowFilePath对应的文件名的信息(路径信息不展示 ...
- Python(Python+Qt)学习随笔:使用xlwings新建Execl文件和sheet的方法
在<Python学习随笔:使用xlwings读取和操作Execl文件>介绍了使用xlwings读取和操作Execl文件的方法,但老猿这两天写个例子使用时,发现使用该文的方法无法新建EXCE ...
- [SWPU2019]Web1 空格过滤用/**/ 注释过滤闭合单引号 imformation_schema.columns/tables过滤 用5.7新特性 或无名注入(此处database()不能用)
0x00 知识点 二次注入流程分析 二次注入漏洞在CTF中常见于留言板和注册登录功能,简单来说可以分为两个步骤: 插入恶意数据(发布帖子,注册账号),用mysql_escape_string()函数对 ...
- Xray批量化自动扫描
关于Xray高级版破解: https://www.cnblogs.com/Cl0ud/p/13884206.html 不过好像新版本的Xray修复了破解的BUG,亲测Xray1.3.3高级版仍然可以破 ...
- [BJDCTF 2nd]xss之光
[BJDCTF 2nd]xss之光 进入网址之后发现存在.git泄露,将源码下载下来,只有index.php文件 <?php $a = $_GET['yds_is_so_beautiful']; ...
- 《深入理解计算机系统》实验一 —Data Lab
本文是CSAPP第二章的配套实验,通过使用有限的运算符来实现正数,负数,浮点数的位级表示.通过完成这13个函数,可以使我们更好的理解计算机中数据的编码方式. 准备工作 首先去官网Lab Assig ...
- jquery 执行a 标签 点击事件 跳转href 路径
<a href="./export.pdf" id="pdfdown" download="文件名.pdf">下载</a& ...
- Java并发编程的艺术(七)——线程间的通信
为什么需要线程间通信 让线程之间合作,提高运行效率. volatile和synchronized关键字 实现原理 这两个方式都是采用共享内存的方式进行通信,通过同步机制保证数据可见性和排他性. 特点 ...