KINECT2通过ROS在线跑ORBSLAM2
source ~/.bashrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/user/ORB_SLAM2/Examples/ROS上面这个一定要做,否则会出错说找不到路径和包
之后
按照orbslam2的github::https://github.com/raulmur/ORB_SLAM2
编译ros节点:
1.chmod +x build_ros.sh
./build_ros.sh
2.打开一个终端,运行:roslaunch kinect2_bridge kinect2_bridge.launch
3.再打开另一个终端,输入:rostopic list查看此时Kinect2发布的topic,我用的是/kinect2/qhd/image_color_rect和/kinect2/qhd/image_depth_rect
4.找到源文件ros_rgbd.cc,按照上面3的topic修改里面的ros订阅的内容
5.重新编译工程
chmod +x build_ros.sh6.在~/ORB_SLAM2/Examples/ROS$ 目录下,运行rosrun ORB_SLAM2 RGBD /home/user/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/user/ORB_SLAM2/Examples/RGB-D/kinect2_qhd.yaml
./build_ros.sh
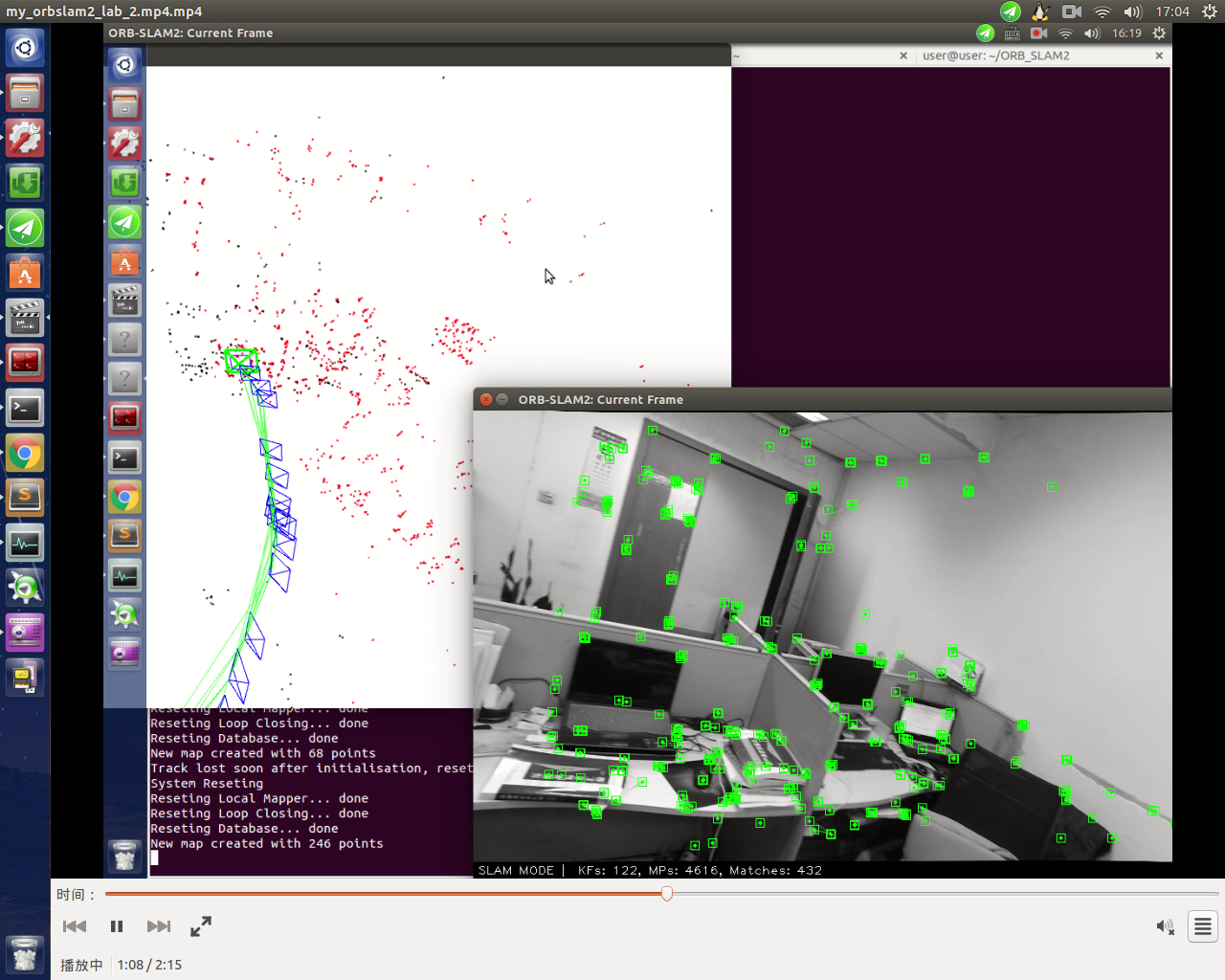
即可得到实时在线轨迹。
KINECT2通过ROS在线跑ORBSLAM2的更多相关文章
- Ubuntu与ROS的Docker桌面系统与ROS在线练习课程(在线Linux虚拟机)
ROS在线练习课程正在逐步完善中,目前以ROS官网中文资料制作,可参考: https://www.shiyanlou.com/courses/854 邀请码 U23ERF8H 安装Ubuntu+RO ...
- 编译ORBSLAM2 build_ros.sh,实现kinect2在ROS环境下运行ORBSLAM2
//編譯ORBSLAM2 build_ros.sh參考:“http://www.cnblogs.com/bigzhao/p/6635770.html”1.source ~/.bashrc出現問題:ct ...
- ORB-SLAM2 运行 —— ROS + Android 手机摄像头
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12404730.html 本文要点: ROS 配置安装 解决 sud ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- Ubuntu安装 Docker CE,VNC访问docker图形界面并安装ROS
从包安装 如果您无法使用Docker的存储库来安装Docker CE,则可以下载.deb适用于您的发行版的 文件并手动安装.每次要升级Docker CE时都需要下载新文件. 安装Docker CE,将 ...
- ORB-SLAM2初步(源码逻辑分析)
今天主要是梳理一下ORB-SLAM2源码的逻辑关系,GitHub和泡泡机器人上有很好的注释版本(吴博),大神请(轻)板砖. 一.文件 如图所示,Examples里面存放的分别是基于单目.双目.RGBD ...
- DSO 运行 —— dso_ros + Android 手机摄像头
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12425855.html 本文要点: dso 配置安装 dso 离线 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- ubuntu14编译SSF(ethzasl_sensor_fusion )
参考:http://wiki.ros.org/ethzasl_sensor_fusion 1. cd catkin_ws/src/ 2 git clone git://github.com/ethz- ...
随机推荐
- CodeForces 292D Connected Components (并查集+YY)
很有意思的一道并查集 题意:给你n个点(<=500个),m条边(<=10000),q(<=20000)个询问.对每个询问的两个值xi yi,表示在从m条边内删除[xi,yi]的边后 ...
- POJ 2728 Desert King:最优比率生成树
题目链接:http://poj.org/problem?id=2728 题意: 给你n个点(x,y,z),让你求一棵生成树,使得 k = ∑ |z[i]-z[j]| / ∑ dis(i,j)最小. | ...
- 英语发音规则---ea字母组合发音规律
英语发音规则---ea字母组合发音规律 一.总结 一句话总结:字母组合ea的发音规律,在学习字母组合在单词中的发音规律以前,一定要熟练撑握什么是开音节,什么是闭音节,否则你就不撑握这些发音规律. ea ...
- Nginx 0.7.x + PHP 5.2.6(FastCGI)+ MySQL 5.1 在128M小内存VPS服务器上的配置优化
对其用户和应用程序来讲,每一个VPS平台的运行和管理都与一台独立主机完全相同,因为每一个VPS均可独立进行重启并拥有自己的root访问权限.用户.IP地址.内存.过程.文件.应用程序.系统函数库以及配 ...
- Sed 命令详解 正则表达式元字符
1.简介 sed是非交互式的编辑器.它不会修改文件,除非使用shell重定向来保存结果.默认情况下,所有的输出行都被打印到屏幕上. sed编辑器逐行处理文件(或输入),并将结果发送到屏幕.具体过程如下 ...
- CNN检测模型统计检出率
X, y = get_feature_charseq() #max_document_length=64 volcab_file = "volcab.pkl" assert os. ...
- SWFObject是什么
一:简介: SWFObject是一个用于在HTML中方便插入Adobe Flash媒体资源(*.swf文件)的独立.敏捷的JavaScript模块.该模块中的JavaScript脚本能够自动检测PC. ...
- Java_数据交换_Gson_00_资源帖
1.Gson将字符串转换成JsonObject和JsonArray 2.Gson 解析教程 3.Gson全解析(上)-Gson基础
- python中的单引号,双引号和三双引号的区别
1.单引号和双引号没有区别.都可以用就是为了方便,减少写太多的转义字符. 比如: str='Let\'s go!' str="Let's go!" 两种等价,但是第二种写法显然更优 ...
- Gym - 100801G: Graph (贪心+set+拓扑)(好题)
题意:给定一个N点M边的有向图,叫你加最多K条边,使得最小拓扑序最大. 思路:不是那么简单的题. 参照了别人的代码, 最后想通了. 贪心原则: 用两个单调队列维护, 第一个序列S1单增, 表示当前入 ...