KINECT2通过ROS在线跑ORBSLAM2
source ~/.bashrc
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/user/ORB_SLAM2/Examples/ROS上面这个一定要做,否则会出错说找不到路径和包
之后
按照orbslam2的github::https://github.com/raulmur/ORB_SLAM2
编译ros节点:
1.chmod +x build_ros.sh
./build_ros.sh
2.打开一个终端,运行:roslaunch kinect2_bridge kinect2_bridge.launch
3.再打开另一个终端,输入:rostopic list查看此时Kinect2发布的topic,我用的是/kinect2/qhd/image_color_rect和/kinect2/qhd/image_depth_rect
4.找到源文件ros_rgbd.cc,按照上面3的topic修改里面的ros订阅的内容
5.重新编译工程
chmod +x build_ros.sh6.在~/ORB_SLAM2/Examples/ROS$ 目录下,运行rosrun ORB_SLAM2 RGBD /home/user/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/user/ORB_SLAM2/Examples/RGB-D/kinect2_qhd.yaml
./build_ros.sh
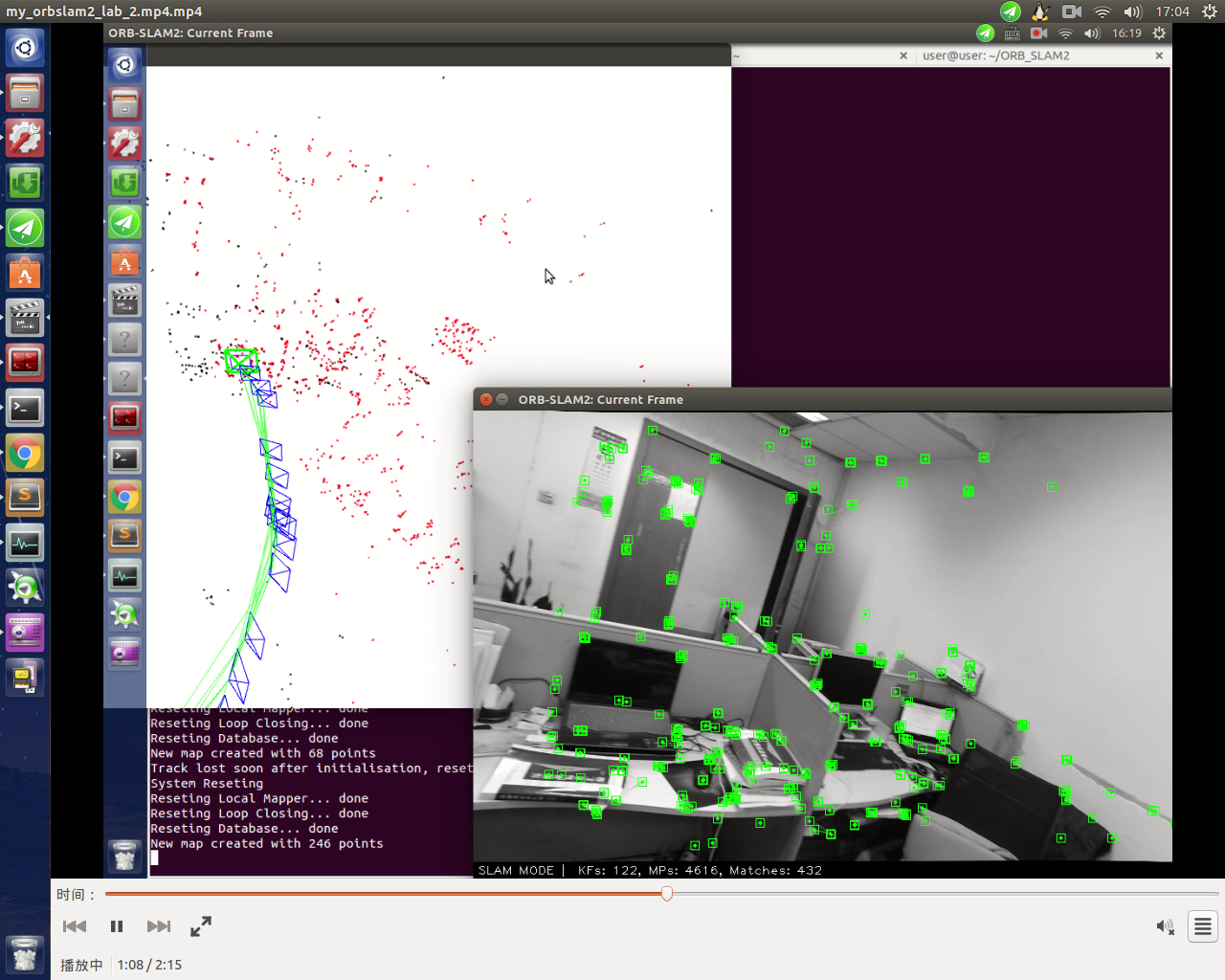
即可得到实时在线轨迹。
KINECT2通过ROS在线跑ORBSLAM2的更多相关文章
- Ubuntu与ROS的Docker桌面系统与ROS在线练习课程(在线Linux虚拟机)
ROS在线练习课程正在逐步完善中,目前以ROS官网中文资料制作,可参考: https://www.shiyanlou.com/courses/854 邀请码 U23ERF8H 安装Ubuntu+RO ...
- 编译ORBSLAM2 build_ros.sh,实现kinect2在ROS环境下运行ORBSLAM2
//編譯ORBSLAM2 build_ros.sh參考:“http://www.cnblogs.com/bigzhao/p/6635770.html”1.source ~/.bashrc出現問題:ct ...
- ORB-SLAM2 运行 —— ROS + Android 手机摄像头
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12404730.html 本文要点: ROS 配置安装 解决 sud ...
- ZED 相机 && ORB-SLAM2安装环境配置与ROS下的调试
注:1. 对某些地方进行了更新(红色标注),以方便进行配置. 2. ZED ROS Wrapper官方github已经更新,根据描述新的Wrapper可能已经不适用与Ros Indigo了,如果大家想 ...
- Ubuntu安装 Docker CE,VNC访问docker图形界面并安装ROS
从包安装 如果您无法使用Docker的存储库来安装Docker CE,则可以下载.deb适用于您的发行版的 文件并手动安装.每次要升级Docker CE时都需要下载新文件. 安装Docker CE,将 ...
- ORB-SLAM2初步(源码逻辑分析)
今天主要是梳理一下ORB-SLAM2源码的逻辑关系,GitHub和泡泡机器人上有很好的注释版本(吴博),大神请(轻)板砖. 一.文件 如图所示,Examples里面存放的分别是基于单目.双目.RGBD ...
- DSO 运行 —— dso_ros + Android 手机摄像头
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12425855.html 本文要点: dso 配置安装 dso 离线 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- ubuntu14编译SSF(ethzasl_sensor_fusion )
参考:http://wiki.ros.org/ethzasl_sensor_fusion 1. cd catkin_ws/src/ 2 git clone git://github.com/ethz- ...
随机推荐
- PyVim
PyVim主要用于连接到 Service Instance import atexit from pyVim import connect // Connect to Server If args.d ...
- 剑指offer之 二叉树镜像
package Problem19; /* * 问题描述: * 请完成一个函数,输入一个二叉树,该函数输出它的镜像; */ //定义二叉树的结构 class BinaryTreeNode { Bina ...
- Source not found The source attachment does not contain the source for the file MethodBeforeAdvice.class
- POJ1363 Rails 验证出栈序列问题
题目地址: http://poj.org/problem?id=1363 此题只需验证是否为合法的出栈序列. 有两个思路: 1.每个已出栈之后的数且小于此数的数都必须按降序排列.复杂度O(n^2),适 ...
- (转)java向MySQL插入当前时间的四种方式和java时间日期格式化的几种方法(案例说明)
java向MySQL插入当前时间的四种方式和java时间日期格式化的几种方法(案例说明);部分资料参考网络资源 1. java向MySQL插入当前时间的四种方式 第一种:将java.util.Date ...
- Linux-MySQL主从配置
1. MySQL主从原理以及应用场景MySQL的Replication原理非常简单,总结一下:每个从仅可以设置一个主.主在执行sql之后,记录二进制log文件(bin-log).从连接主,并从主获取b ...
- mysql字符串的隐式转换导致查询异常
如果mysql某个字段(name)类型为varchar, 加了索引,在执行where查询的时候,传入了int的值,这样就会全表扫描,把每一条的值都转换成int(会出现"中国"-&g ...
- 【leetcode刷题笔记】N-Queens II
Follow up for N-Queens problem. Now, instead outputting board configurations, return the total numbe ...
- 基于v4l2 ffmpeg x264的视频远程监控(附上编译好的库文件)
说明:主要是基于ghostyu网友整理的< arm mini2440 基于v4l2 ffmpeg x264的视频远程监控>.自己做了一遍,遇到不少问题,就整理记录下来. 1.平台 硬件:a ...
- 删除文件时提示 你需要来自system的权限才能对此文件夹进行更改
问题描述: 我的计算机是Win7 x64操作系统,在我的计算机的F盘中,不知道什么时候多了个“12e4k69m762nzcgt8zx”这样一个文件夹,应该是某个软件自己创建并留下的文件夹,想删除掉则提 ...