三,ESP8266 SPI
https://www.cnblogs.com/yangfengwu/p/7520260.html
重点是说SPI通信协议,,,,
不要害怕协议因为协议是人规定的,,刚好我也是人......规定的协议既然能成为规范让所有人所接受,那么必然有它的优势和优点,必然值得学习,,
害怕协议的人是因为当初碰到了不懂的老师,他只会告诉你这很难............其实是他不会........
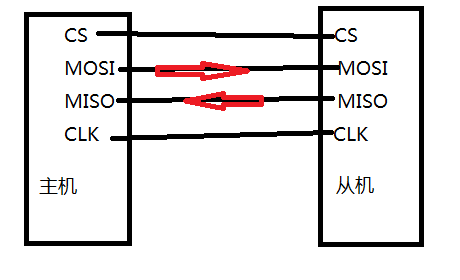
CS : Chip Selection 片选引脚,多个设备时可以用这个引脚选择和哪个设备通信
MOSI : Master Out Slave In 主机输出数据引脚,,,,从机接收数据引脚
MISO : Master In Slave Out 主机接收数据引脚....从机输出数据引脚
CLK : 时钟
还有两个参数----假设有的单片机自带硬件SPI,一定会提供设置下面两个参数,,,当然有的支持SPI通信的芯片也可能涉及这两个参数
CPOL :表示时钟信号(CLK引脚)在空闲时是高电平还是低电平
CPHA :表示数据在时钟信号(CLK)的第几个沿开始数据传输
现在假如说
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 0;//数据在时钟信号(CLK)的第1个沿开始数据传输
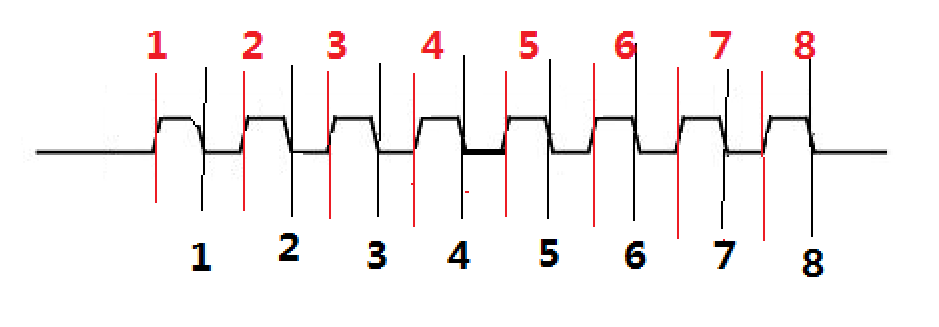
通信的时候先传输高位
假如说 主机发给从机 10101010 从机发给主机 01010101
再假如 主机接收数据存到 MasterData 里面
从机接收数据存到 SlaveData 里面
第一个上升沿 主机的0101010 最高位是 1 所以主机会让MOSI引脚输出高电平
从机的1010101最高位是 0 所以从机会让MISO引脚为低电平
第一个下降沿 主机接收MISO引脚的数据,因为是低电平所以 MasterData= 0000 000;
从机接收MOSI引脚的数据,因为是高电平所以从机SlaveData = 0000 0001;
第二个上升沿 主机左移一位 101010X 最高位是 0 所以主机会让MOSI引脚输出低电平
从机左移一位 010101X 最高位是 1 所以从机会让MISO引脚为高电平
第二个下降沿 主机接收MISO引脚的数据,因为是高电平所以 MasterData= 0000 0001;
从机接收MOSI引脚的数据,因为是低电平所以从机SlaveData = 0000 0010;
就这样8个上升和8个下降沿之后
MasterData = 01010101
SlaveData = 10101010
现在假如说
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 1;//数据在时钟信号(CLK)的第2个沿开始数据传输
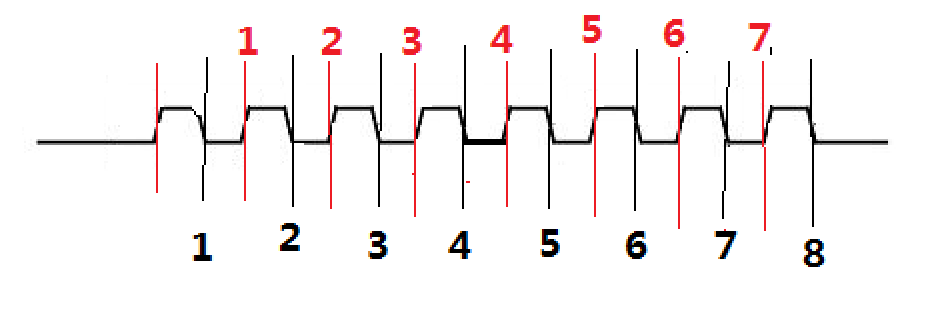
第一个下降沿 主机的0101010 最高位是 1 所以主机会让MOSI引脚输出高电平
从机的1010101最高位是 0 所以从机会让MISO引脚为低电平
第一个上升沿 (注意是标号为1的那个,,,实际上是第二个上升沿)
主机接收MISO引脚的数据,因为是低电平所以 MasterData= 0000 0000;
从机接收MOSI引脚的数据,因为是高电平所以从机SlaveData = 0000 0001;
第二个下降沿 主机左移一位 101010X 最高位是 0 所以主机会让MOSI引脚输出低电平
从机左移一位 010101X 最高位是 1 所以从机会让MISO引脚为高电平
第二个上升沿 主机接收MISO引脚的数据,因为是高电平所以 MasterData= 0000 0001;
从机接收MOSI引脚的数据,因为是低电平所以从机SlaveData = 0000 0010;
第八个下降沿 主机把最后一位0放在了 MOSI引脚输出低电平
从机把最后一位1放在了 MISO引脚输出高电平
其实现在我也有疑惑,,,这样就完了吗??????只把数据放在引脚上就行了吗????然后内部硬件就自动接收了吗????
看一下摩托罗拉的数据手册

难道最后一位会自动的接收?????搞不懂咧咧.....改天自己测试一下,,,让主机工作在
CPOL = 0 ;//时钟信号(CLK引脚)在空闲时是低电平
CPHA = 1;//数据在时钟信号(CLK)的第2个沿开始数据传输
然后让主机发一个字节的数据看看CLK怎样变化的..............然后再尝试手写从机接收....然后知道结果了再来修改这个地方....
其余的两种就不说了
其实说白了就是
CPOL控制在空闲状态下CLK是高电平还是低电平
CPHA控制数据是在第一个沿就开始传输还是在第二个沿
其实呢!!写程序最终还是要看芯片的资料,,,,,
现在看一下ESP8266的SPI
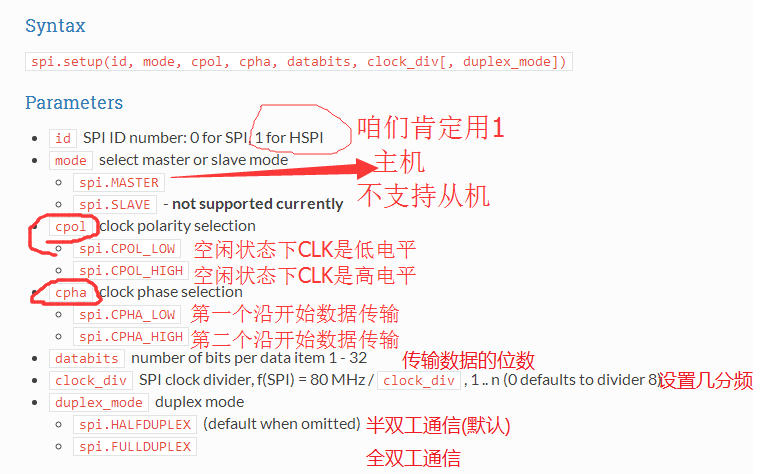
spi.setup(, spi.MASTER, spi.CPOL_HIGH, spi.CPHA_HIGH, , )
用SPI1,主机模式,,空闲状态下Clk为高电平,,第二个沿开始数据传输,8位数据,8分频(10Mhz),默认半双工
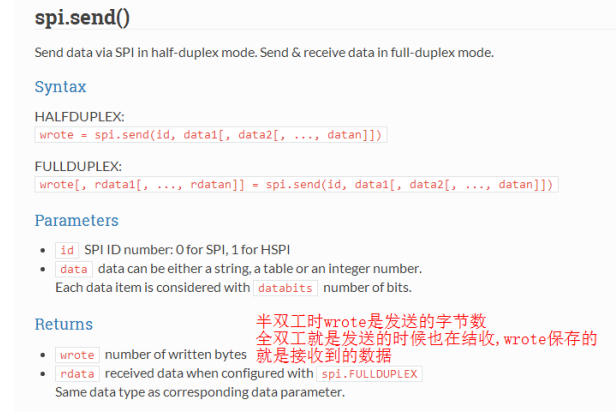
发送数据呢就简单了
比如向从机发送0xaa,0x55,0x02,0x01
spi.send(,0xaa,0x55,0x02,0x01)
接收数据呢还另有个函数
假设需要接收4个数据
ReadData = spi.recv(,,0xaa)
其实就是让CLK产生32个脉冲信号,每8个代表一个字节的数据,,后面的0xaa哈,是在产生脉冲信号的时候MOSI引脚发送的数据,,如果不写
默认发0xFF

对了接收到的数据都是以字符串的形式保存在变量里面,,可能会问我怎么自己解析数据呢
假如说判断是不是接收到0xaa 和0x55
aa = spi.recv(1,2,0xaa)
if aa:byte(1)==0xaa and aa:byte(2)==0x55 then
自己的执行函数
end
大家肯定会说你咋知道要这样写
因为有API文档

还有一点,,我一开始看到过别人这样做过,,所以呢我就知道可以这样用....知识这东西一定要活学活用
http://blog.csdn.net/silno/article/details/72866623?locationNum=10&fps=1

最后说一下和STM32进行SPI通信的一些注意,,,当然是把stm32配置成从机模式,,然后呢其余的设置一定要一样
列如我配置的
void Spi2SlaveInit(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE );//SPI2时钟使能 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;//CS
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); //GPIO_ResetBits(GPIOB,GPIO_Pin_12); //PB13/14/15上拉 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14 ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure); GPIO_ResetBits(GPIOB,GPIO_Pin_14); //PB13/14/15上拉 GPIO_ResetBits(GPIOB,GPIO_Pin_15); //PB13/14/15上拉 SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Slave;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
// SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_NSS = SPI_NSS_Hard; //如果这里使用硬件模式,从机低电平
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = ;
SPI_Init(SPI2, &SPI_InitStructure); SPI_I2S_ITConfig(SPI2,SPI_I2S_IT_RXNE,ENABLE); SPI_Cmd(SPI2 , ENABLE);
}
要注意
CS引脚在模块刚启动的时候一定是低电平............
再说一点,我的32程序用的中断接收的SPI的数据,然后在中断里面准备发送的数据,,大家这样想
主机的数据发过来一个字节数据之后才进的中断,,所以如果想在中断里面发送数据,,应该在进中断之前准备好数据的第一个字节
假设主机需要读四个字节就会进四次中断
我从机发给主机的数据是0xaa 0x55 0x01 0x02
char table[4] = {0xaa, 0x55, 0x01, 0x02}
在主机发送数据之前
我需要 SPI2->DR = table;
Spi2SendBuff = table+1;
void SPI2_IRQHandler(void)
{
if(SPI_I2S_GetITStatus(SPI2, SPI_I2S_IT_RXNE) == SET)
{
SPI2->DR = *Spi2SendBuff;
Spi2ReadBuff[Spi2ReadCnt] = SPI2->DR; Spi2ReadCnt ++;
Spi2SendBuff ++;
}
}
这样的话来第一个中断的时候我的第一个数据0xaa也发向了主机,然后又准备了第二个数据,,,,,,,四次中断就会把数据发给了主机,,注意指针溢出乱指了一下
这篇文章呢主要是会用ESP8266的SPI就行哈......
https://www.cnblogs.com/yangfengwu/p/7524326.html
三,ESP8266 SPI的更多相关文章
- 三,ESP8266 SPI(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7520260.html 重点是说SPI通信协议,,,, 不要害怕协议因为协议是人规定的,,刚好我也是人......规定的协议 ...
- ESP8266开发之旅 基础篇⑤ ESP8266 SPI通信和I2C通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信,所以本章的主要内容就是讲解ESP8266 SPI和I2C总线 ...
- ESP8266 SPI通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信 1. SPI总线——SPI类库的使用 SPI是串行外设接口(Seri ...
- ZYNQ SGI、PPI、SPI三种中断的实例(含代码)
ZYNQ中断分为3类: SGI(Software Generated Interrupts)软件中断 PPI(Private Peripheral Interrupts)私有外设中断 SPI(Shar ...
- ESP8266开发之旅 网络篇⑯ 无线更新——OTA固件更新
授人以鱼不如授人以渔,目的不是为了教会你具体项目开发,而是学会学习的能力.希望大家分享给你周边需要的朋友或者同学,说不定大神成长之路有博哥的奠基石... QQ技术互动交流群:ESP8266&3 ...
- ESP8266开发之旅 进阶篇② 闲聊Arduino IDE For ESP8266烧录配置
授人以鱼不如授人以渔,目的不是为了教会你具体项目开发,而是学会学习的能力.希望大家分享给你周边需要的朋友或者同学,说不定大神成长之路有博哥的奠基石... QQ技术互动交流群:ESP8266&3 ...
- ESP8266开发之旅 基础篇① 走进ESP8266的世界
授人以鱼不如授人以渔,目的不是为了教会你具体项目开发,而是学会学习的能力.希望大家分享给你周边需要的朋友或者同学,说不定大神成长之路有博哥的奠基石... QQ技术互动交流群:ESP8266&3 ...
- ESP8266开发之旅 基础篇② 如何安装ESP8266的Arduino开发环境
授人以鱼不如授人以渔,目的不是为了教会你具体项目开发,而是学会学习的能力.希望大家分享给你周边需要的朋友或者同学,说不定大神成长之路有博哥的奠基石... QQ技术互动交流群:ESP8266&3 ...
- ESP8266开发之旅 基础篇③ ESP8266与Arduino的开发说明
授人以鱼不如授人以渔,目的不是为了教会你具体项目开发,而是学会学习的能力.希望大家分享给你周边需要的朋友或者同学,说不定大神成长之路有博哥的奠基石... QQ技术互动交流群:ESP8266&3 ...
随机推荐
- spring容器注入一个接口的两个实现类
spring容器中能拥有两个同种类型的bean吗?我有两个dao类同时实现一个接口,这两个接口注入时报了异常如下. org.springframework.beans.factory.NoSuchBe ...
- ASP.NET Core MVC – Form Tag Helpers
ASP.NET Core Tag Helpers系列目录 ASP.NET Core MVC Tag Helpers 介绍 ASP.NET Core MVC – Caching Tag Helpers ...
- 用vue写添加数据、删除数据、筛选数据表格
<!DOCTYPE html> <html lang="en"> <head> <meta charset="utf-8&quo ...
- 树状数组lowbit()函数原理的解释 x&(x^(x-1)) x&-x
树状数组lowbit()函数所求的就是最低位1的位置所以可以通过位运算来计算 树状数组通过 x&(x^(x-1)) 能够成功求出lowbit的原因: 首先设x=6,即110(2) 于是我们使 ...
- ThinkSNS+ 基于 Laravel master 分支,从 1 到 0,再到 0.1
什么是 ThinkSNS+ 09 年,由北京的团队开发了 ThinkSNS 涉足社交开源行业.这么多年累计不少客户.2014-2016,两年都在维护和开发之前基于 TP 的 ThinkSNS , 慢慢 ...
- Dinic算法详解及实现
预备知识: 残留网络:设有容量网络G(V,E)及其上的网络流f,G关于f的残留网络即为G(V',E'),其中G'的顶点集V'和G的顶点集V相同,即V'=V,对于G中任何一条弧<u,v>,如 ...
- leetcode Binary Tree Right Side
Given a binary tree, imagine yourself standing on the right side of it, return the values of the nod ...
- co源码解析
一.co函数是什么 co 函数库是著名程序员 TJ Holowaychuk 于2013年6月发布的一个小工具,用于 Generator 函数的自动执行.短小精悍只有短短200余行,就可以免去手动编写G ...
- 关于Java中面向对象章节、IO 流中的重点基础知识。
一.面向对象的三大特征,以及作用. 答:面向对象的三大特征即,封装性.继承性.多态性. 其分别的作用为 : 封装作用:将数据封装起来,提高数据的安全性, 继承作用:提高代码的复用性,减少冗余代码. 多 ...
- IOS中的单例设计模式
单例设计模式是IOS开发中一种很重要很常用的一种设计模式.它的设计原理是无论请求多少次,始终返回一个实例,也就是一个类只有一个实例.下面是苹果官方文档中关于单例模式的图片: 如图所示,左边的图是默认的 ...