Learning Feature Pyramids for Human Pose Estimation(理解)
0 - 背景
人体姿态识别是计算机视觉的基础的具有挑战性的任务,其中对于身体部位的尺度变化性是存在的一个显著挑战。虽然金字塔方法广泛应用于解决此类问题,但该方法还是没有很好的被探索,我们设计了一个Pyramid Residual Module(PRMs)来提高DCNNs的尺度不变性。
并且我们发现现存的初始化方法并不适用multi-branch的网络,我们在当前的权重初始化方法上提出了新的方法并给出了理论证明。
1 - 贡献
- 提出Pyramid Residual Module来提高深度模型的尺度不变性问题,而只是比DCNNs多一点点复杂性
- 分析了DCNNs多输入或者多输出层的初始化问题(当前MSR和Xavier初始化方法不适用multi-branch网络),提出了新的权重初始化策略(可以用于许多网络架构,包括inception models和ResNets)
- 我们发现在一些场景中激活变化累积是由identity mapping造成的,运用一种简单的有效解决方案
2 - 整体思路
2.1 - 尺度不变性
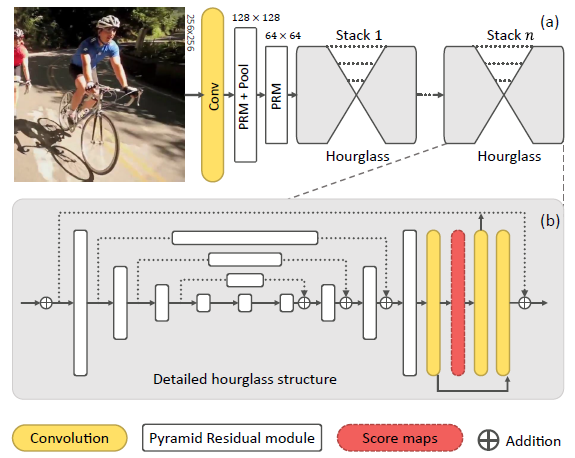
如上图,(a)和(b)由于透视关系,(a)中的上半身身体部位显得很大,而相反(b)中的上半身部位显得小,如果对于不同尺度的身体部位运用相同检测器,则尺度的变化将严重影响检测器的效果,因此在检测的时候需要在图像多变的情况下保证尺度不变性。论文用了如下大致架构:
2.2 - Pyramid Residual Modules (PRMs)
PRM被形式化描述为:
$$x^{(l+1)}=x^{(l)}+P(x^{(l)};W^{(l)})$$
其中$P(x^{(l)};W^{(l)})$是特征金字塔,可以被展开为:
$$P(x^{(l)};W^{(l)})=g\begin{pmatrix}\sum_{c=1}^{C}f_c(x^{(l)};w_{f_c}^{(l)});w_g^{(l)}\end{pmatrix}+f_0(x^{(l)};w_{f_o}^{(l)})$$
其中$C$为金字塔的层数,$f_c(\cdot)$为对于c-th层金字塔的转换,$W^{(l)}=\{w_{f_c}^{(l)},w_g^{(l)}\}_{c=0}^C$是参数集合。 通过转换$f_c(\cdot)$的输出将通过求和进行合并,并且通过卷积核为$g(\cdot)$的卷积。pyramid residual module图解如下,为了减少计算以及空间的复杂度,每一个$f_c(\cdot)$被组织成bottleneck架构(有点像ResNet,例如通过$1 \times 1$卷积核降低空间维度,而后新的特征通过将$3 \times 3$卷积核应用到一个下采样的输入特征集合上,最后所有新的特征上采样到同一个维度而后合并)。
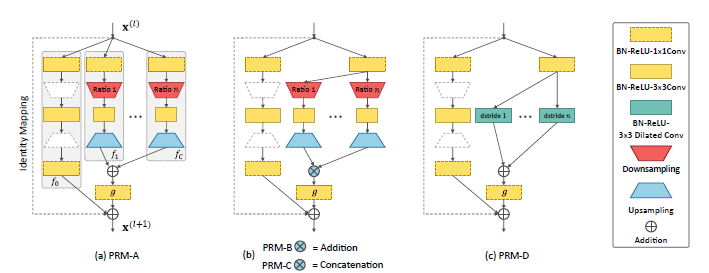
通过比较,PRM-B的参数更少,需要更少的计算资源但是与其它结构有可比的性能。
2.3 - fractional max-pooling
由于传统的pooling操作对于像素的减少太快以至于太过于粗糙,因此论文提出了一种新的fractional max-pooling方式,使得下采样的尺度平滑,金字塔的c-th层的下采样率定义为:
$$s_c=2^{-M\frac{c}{C}},\ c=0,...,C,M\geq 1$$
其中$s_c\in [2^{-M},1]$表示了与输入特征分辨率的关系。在实验中,作者的设置为$M=1$以及$C=4$,使得最低的层刚好是输入分辨率的一半。
2.4 - 评估策略
通过高斯方法来表示关键点,对于每一个关键点需要一个评分地图(score map)。例如,对于真实标签落在$z_k=(x_k,y_k)$的第$k$个关键点,其评分地图定义为:
$$S_k(p)\sim N(z_k,\Sigma )$$
其中$p\in R^2$表示了坐标,$\Sigma$是identity matrix $I$的经验集合,每一个沙漏网络预测$K$个评分地图,有$\hat{S}_k=\{\hat{S}_k\}_{k=1}^K$,损失函数定义如下:
$$L=\frac{1}{2}\sum_{n=1}^N\sum_{k=1}^{K}\begin{Vmatrix}S_k-\hat{S}_k\end{Vmatrix}^2$$
最后预测时候通过如下公式得到精确关键点坐标:
$$\hat{z}_k=arg\mathop{max}_p\hat{S}_k(p),k=1,...,K$$
2.5 - Initialization Multi-Branch Networks
(数学推导没看懂,后续如果有进展再补充)
3 - 实验
在MPII human pose dataset和Leeds Sports Poses (LSP)及其扩充数据集上。
输入图片为$256 \times 256$,单人人体姿态识别,训练数据集通过scaling/rotation/flipping/adding color noise进行增强,使用RMSProp进行优化,每个GPU的mini-batch size为16,epoch为200,学习率为$7\times 10^{-4}$,在第150次和第170次epoch学习率各减少10倍。测试时候在具有翻转的六尺度图像金字塔上进行。
3.1 - MPII Human Pose
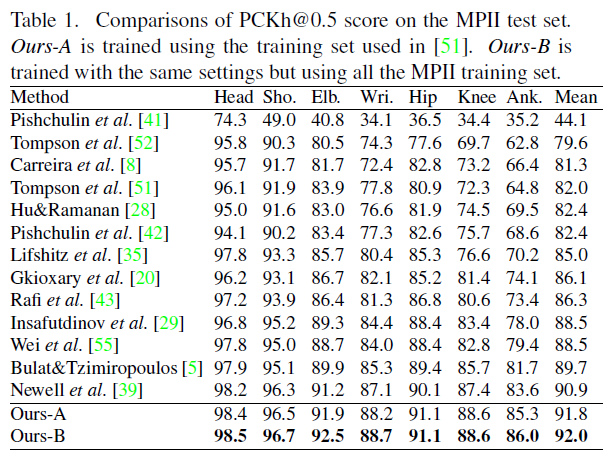
阈值为0.5时我们的方法达到了92.0%的PCKh分数,是新的state-of-the-art结果,特别地是,我们的方法在wrist和ankle上分别实现了1.6%和2.4%的性能提升。而我们的网络参数从23.7M增加到26.9M(增加了13.5%,因为我们堆叠了八个沙漏网络),我们的网络对于$256 \times 256$的$RGB$图像需要45.9 GFLOPs(相比沙漏网络的41.2 GFLOPs增加了11.4%)。
3.2 - LSP dataset
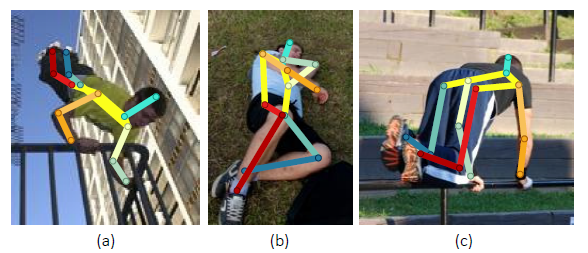
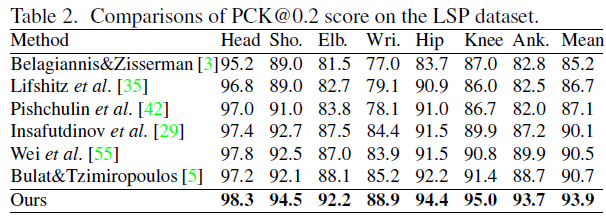
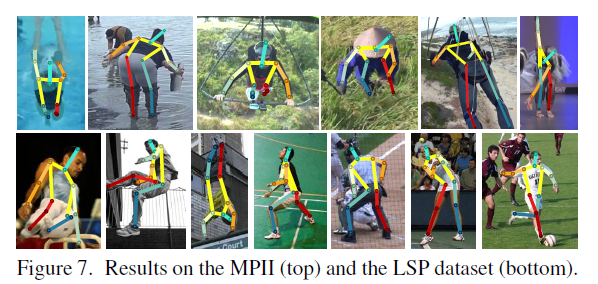
我们的方法相比之前最好的结果大幅度提高了3.2%,对于困难的身体部位,如wrist和ankle,我们分别取得了3.7%和5.0%的提升。我们的方法在此数据集上的显著提升主要是因为该数据集中存在大量透视变化以及极端的姿势,如下图所示。
4 - 参考资料
https://arxiv.org/abs/1708.01101
http://www.aiuai.cn/aifarm174.html
Learning Feature Pyramids for Human Pose Estimation(理解)的更多相关文章
- (转)Awesome Human Pose Estimation
Awesome Human Pose Estimation 2018-10-08 11:02:35 Copied from: https://github.com/cbsudux/awesome-hu ...
- Deep High-Resolution Representation Learning for Human Pose Estimation
Deep High-Resolution Representation Learning for Human Pose Estimation 2019-08-30 22:05:59 Paper: CV ...
- 论文阅读理解 - Stacked Hourglass Networks for Human Pose Estimation
http://blog.csdn.net/zziahgf/article/details/72732220 keywords 人体姿态估计 Human Pose Estimation 给定单张RGB图 ...
- 论文笔记 Stacked Hourglass Networks for Human Pose Estimation
Stacked Hourglass Networks for Human Pose Estimation key words:人体姿态估计 Human Pose Estimation 给定单张RGB ...
- human pose estimation
2D Pose estimation主要面临的困难:遮挡.复杂背景.光照.真实世界的复杂姿态.人的尺度不一.拍摄角度不固定等. 单人姿态估计 传统方法:基于Pictorial Structures, ...
- DensePose: Dense Human Pose Estimation In The Wild(理解)
0 - 背景 Facebook AI Research(FAIR)开源了一项将2D的RGB图像的所有人体像素实时映射到3D模型的技术(DensePose).支持户外和穿着宽松衣服的对象识别,支持多人同 ...
- 对DensePose: Dense Human Pose Estimation In The Wild的理解
研究方法 通过完全卷积学习从图像像素到密集模板网格的映射.将此任务作为一个回归问题,并利用手动注释的面部标注来训练我们的网络.使用这样的标注,在三维对象模板和输入图像之间,建立密集的对应领域,然后作为 ...
- Deep learning for visual understanding: A review 视觉理解中的深度学习:回顾 之一
Deep learning for visual understanding: A review 视觉理解中的深度学习:回顾 ABSTRACT: Deep learning algorithms ar ...
- paper 154:姿态估计(Hand Pose Estimation)相关总结
Awesome Works !!!! Table of Contents Conference Papers 2017 ICCV 2017 CVPR 2017 Others 2016 ECCV 20 ...
随机推荐
- Ubuntu 14.04 下使用微软的跨平台轻量级开发神器 Visual Studio Code
因为 Visual Studio Code 不断更新,官方最新 v1.32 的 .deb 包已经不能用于 Ubuntu 14.04 直接安装了. 下载 v1.31 的 deb 包安装即可:https: ...
- MySQL慢查询&执行计划
参考文章: https://blog.csdn.net/tiantianw/article/details/53334566 http://www.cnblogs.com/luyucheng/p/62 ...
- Python中的 sort 和 sorted
今天在做一道题时,因为忘了Python中sort和sorted的用法与区别导致程序一直报错,找了好久才知道是使用方法错误的问题!现在就大致的归纳一下sort和sorted的用法与区别 1. sort: ...
- pycharm .sqlite文件拖动到Database里面为空
pycharm .sqlite文件拖动到Database里面为空 查资料得到解决方法:
- [蓝桥杯]2017蓝桥省赛B组题目及详解
/*——————————————————————————————————————————————————————————— [结果填空题]T1 (分值:5) 题目:购物单 小明刚刚找到工作,老板人很好 ...
- windows编程 进程的创建销毁和分析
Windows程序设计:进程 进程是一个具有一定独立功能的程序关于某个数据集合的一次运行活动,在Windows编程环境下,主要由两大元素组成: • 一个是操作系统用来管理进程的内核对象.操作系统使用内 ...
- 【XSY3370】道路建设 最短路
题目大意 有一个完全图,边有边权. 对于每个 \(i\),求一棵生成树,使得( \(\sum_{j=1,j\neq i}^n\) \(j\) 到 \(i\) 的路径上边权最小值) 最小. \(n\le ...
- Spark-1(概念)
1. 什么是Spark? Apache Spark™是用于大规模数据处理的统一分析引擎. spark是一个实现快速通用的集群计算平台.它是由加州大学伯克利分校AMP实验室开发的通用内存并行计算框架,用 ...
- Celery
在程序的运行过程中,我们经常会碰到一些耗时耗资源的操作,为了避免它们阻塞主程序的运行,我们经常会采用多线程或异步任务.比如,在 Web 开发中,对新用户的注册,我们通常会给他发一封激活邮件,而发邮件是 ...
- java的数组
作用:存储相同类型的一组数组,相当于一个容器,存放数据的.对同种数据类型集中存储.管理.便于遍历 数组类型:就是数组中存储的数据的类型 特点:数组中的所有元素必须属于相同的数据类型,数组中所有元素在内 ...