加快你ROS安装的一篇文章
前言:
首先ROS大家应该比较熟悉了哈,如果需要补充一下请看我之前的这篇文章 《嵌入式的我们为什么要学ROS》,对于嵌入式来说ROS是一个很好的进阶方向,所以如何快速的安装一个ROS到我们电脑上是一件很重要的事情。当然ROS官网都有进行介绍如何安装,但是由于网络地址的原因,ROS安装如果按照官网的方法,你要踩很多的坑。所以我作为一个过来人,介绍一些我是如何快速安装的。
ROS 目前主要支持 Ubuntu、OSX、Android、Arch、Debian 等系统,ROS 也针对 ARM 处理器编译了核心库和部分功能包。新发布的 ROS2 也支持 Windows 系统。
选择一个适合你的 ROS 版本很重要,因为我使用的本次测试使用的 Ubuntu 版本为 Ubuntu 16.04,ROS Kinetic Kame 还是比较适合的。如果你使用的是 Ubuntu 20 更新的版本,可以安装 noetic 版本,虽然版本不一样,但是安装时的操作基本都是一样的。

开始安装:
首先我们看官网的教程
,虽然有官方的教程,但是我们知道ROS官方相关的源都在国内,所以如果你使用官网的教程,那么相信你如果不使用特殊方法的话,你会安装的很费力。大部分包括之前的我就被安装时候下载速度惊呆。
所以第一件事情,请大家更换ROS的国内镜像
sudo vi /etc/apt/sources.list

设置ROS的sources.list为国内镜像:
这里有其他人做的参考,但是经过使用之后发现有些问题:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ main" > /etc/apt/sources.list.d/ros-latest.list'
有问题!!!

sudo apt-get update 会提示如下错误
E: Malformed entry 1 in list file /etc/apt/sources.list.d/ros-latest.list (Suite)
E: The list of sources could not be read.
我的建议使用官网的命令, 再把链接替换成,国内镜像源。
sudo sh -c 'echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
再使用官网命令添加 keys
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

加载软件包列表
一旦配置完软件版本仓库(repositories)之后,可以用下列命令得到最新的可用软件包列表:
udo apt-get update
需要注意的是,这会更新你系统中所有的软件版本仓库,而不仅仅是新添加的 ROS 库。
安装 ROS 软件包
ROS系 统非常庞大,包含众多功能包、函数库和工具,所以ROS官方为用户提供了多种安装版本:
桌面完整版安装(Desktop-Full):这是最为推荐的一种安装版本,除了包含ROS的基础功能(核心功能包、构建工具和通信机制)外,还包含丰富的机器人通用函数库、功能包(2D/3D感知功能、机器人地图建模、自主导航等)以及工具(rviz可视化工具、gazebo仿真环境、rqt工具箱等)。命令为:
sudo apt-get install ros-kinetic-desktop-full
默认全装,后面大家也不需要再安装了。 分包安装的内容大家可以参看我篇头所写的那篇 ROS 文章。
如果按照官方源,那我们这里需要下载安装好长的时间,不过用国内镜像 不出意外 一般是十几分钟就可以下载完毕。
如果提示下载失败, 重复这个命令:
sudo apt-get install ros-kinetic-desktop-full

环境设定
每次启动新的shell时,如果将ROS环境变量自动添加到bash会话中,将很方便:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
. ~/.bashrc
source ~/.bashrc
构建软件包的依赖关系
rosinstall 是一个常用的命令行工具,我们可以通过一个命令轻松下载 ROS 软件包的许多源代码树。
要安装此工具和其他依赖项以构建ROS软件包,请运行:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential


为系统设置rosdep
rosdep 是 ROS 自带的工具,主要功能是为某些功能包安装依赖关系,同时某些ROS核心功能包必须用到的工具,这个初始化步骤是一次性的,一旦 ROS 正常工作,多数用户不再需要访问 rosdep。完成上述安装步骤之后,需要使用如下命令进行初始化操作:
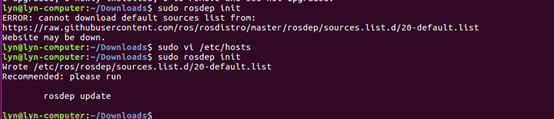
sudo rosdep init
rosdep update
rosdep update 会在你的账户中初始化 rosdep 系统,该命令在你的根目录下保存一些文件,文件夹名为 .ros,因为是初始化,这个命令只需要运行一次。该命令是在普通用户下运行。
rosdep init 经常出现问题,加载失败和下载失败
**error loading sources list
**

sudo vi /etc/hosts
在最下面添加一句这个:
151.101.84.133 raw.githubusercontent.com

看小乌龟
安装小乌龟,这个看似简单的小乌龟例程,其实蕴含ROS最基础的原理和机制。
sudo apt-get install ros-kinetic-turtlesim
打开一个终端(Terminal),这是ROS运行需要的管理器节点
roscore

打开第二个Terminal,启动turtlesim仿真器节点(可以把小乌龟的界面长置顶)
rosrun turtlesim turtlesim_node

打开第三个Terminal,通过使用键盘的前后左右按键进行控制小乌龟
rosrun turtlesim turtle_teleop_key

ROS安装完成
加快你ROS安装的一篇文章的更多相关文章
- vs2010如何安装mvc3,怎样安装,详细的步骤,从哪下载?请看这篇文章。
vs2010如何安装mvc3,怎样安装,详细的步骤,从哪下载?请看这篇文章. 安装步骤:vs2010 -> vs2010sp1 -> AspNetMVC3Setup -> AspNe ...
- linux-一篇文章完成lnmp环境的编译安装
lnmp环境搭建 前置条件 操作系统安装:CentOS 6.8 64位最小化安装. 配置好IP.DNS.网关.主机名 配置防火墙,开启80.3306端口 关闭访问墙 service iptables ...
- 这是一篇致力于解决Linux小白无法安装tunctl工具的文章
计算机网络——搭建Linux下的实验环境并成功安装tunctl 各位如果是来解决安装tunctl的问题的,请直接到2.2部分的内容. 这个学期终于迎来了计算机网络这门课程,也终于能够进一步了解让我无数 ...
- ROS学习笔记一:ROS安装与测试
1 Ubuntu和ROS版本的对应关系 Ubuntu 和 ROS 都存在不同的版本,其对应关系如下: 注:如果Ubuntu版本和ROS版本不对应的话,安装就不会成功了- 笔者安装的是Ubuntu14. ...
- Vue开发入门看这篇文章就够了
摘要: 很多值得了解的细节. 原文:Vue开发看这篇文章就够了 作者:Random Fundebug经授权转载,版权归原作者所有. 介绍 Vue 中文网 Vue github Vue.js 是一套构建 ...
- 【转帖】我以为我对Kafka很了解,直到我看了这篇文章
我以为我对Kafka很了解,直到我看了这篇文章 2019-08-12 18:05 https://www.sohu.com/a/333235171_463994?spm=smpc.author.fd- ...
- ROS教程(一):ROS安装教程(详细图文)
ros教程:ros安装 目录 前言 一.版本选择 二.开始安装 2.1 软件中心配置 2.2 添加源 2.3 安装 三.验证ROS 前言 关于ROS(Robot OS 机器人操作系统),估计看这个教程 ...
- APP的缓存文件到底应该存在哪?看完这篇文章你应该就自己清楚了
APP的缓存文件到底应该存在哪?看完这篇文章你应该就自己清楚了 彻底理解android中的内部存储与外部存储 存储在内部还是外部 所有的Android设备均有两个文件存储区域:"intern ...
- USB C和USB 3.1傻傻分不清?这篇文章可以帮你
USB Type-C接口以及USB 3.1标准的到来,理应为消费者提供更多便利.然而就目前来看,似乎这些新标准非但没有为消费者提供了更好的使用体验,反而带来了诸多隐患.Google的工程师Benson ...
随机推荐
- 简单做了一个代办事项列表系统 ,增删改查。 前台页面用 jquery 后台用nodejs ,数据库用的是mongdoDB 。
引入npm 第三方mongoose包连接mongoDb本地数据库todolist const mongoose = require('mongoose'); mongoose.connect('mon ...
- #2使用html+css+js制作网站教程 测试
#2使用html+css+js制作网站教程 测试 本系列链接 1 测试 1.1 运行 1.2 审查 1.3 审查技巧 1.4 其他 引言: 编写完代码后就要上机测试代码,获得用户体验,筛选bug 笔者 ...
- 用隧道协议实现不同dubbo集群间的透明通信
用隧道协议实现不同dubbo集群间的透明通信 前言 笔者最近完成了一个非常有意思的隧道机制(已在产线运行),可以让注册到不同zookeeper之间的dubbo集群之间能够正常进行通信.如下图所示: 例 ...
- PHP 插件资源
PHP jsonRPC 百度云网盘地址 https://pan.baidu.com/s/1itCIhrdd5bPGJMefNUuKvw 提取码 : ax4d PHP Excel 百度云网盘 ...
- Flutter 布局类组件:线性布局(Row和Column)
前言 所谓线性布局,即指沿水平或垂直方向排布子组件.Flutter中通过Row和Column来实现线性布局,并且它们都继承自弹性布局(Flex). 接口描述 Row({ Key key, // 表示子 ...
- Desired_Capabilities配置
appium服务器初始化参数 最全: https://github.com/appium/appium/blob/master/docs/cn/writing-running-appium/caps. ...
- Linux面试必备
1.Linux的体系结构
- 【Linux】云服务器部署宝塔linux控制面板环境
服务器购买及宝塔部署环境说明 简单记录 - 狂神的 服务器购买及宝塔部署环境说明 服务器如何购买 我们尽量趁打折的时候购买,比较便宜点!多看看有活动. 如果是学生,可以购买学生机, 学生机地址:htt ...
- postgresql插件安装
postgresql安装包自带插件安装: 1.编译安装插件 # root用户 # postgresql安装过程省略 # 进入解压包的contrib目录 cd postgresql-10.6/contr ...
- Android事件分发机制二:viewGroup与view对事件的处理
前言 很高兴遇见你~ 在上一篇文章 Android事件分发机制一:事件是如何到达activity的? 中,我们讨论了触摸信息从屏幕产生到发送给具体 的view处理的整体流程,这里先来简单回顾一下: 触 ...