人形机器人 —— Figure 01机器人亮相 | OpenAI多模态能力加持 | 与人类流畅对话交互 | 具身智能的GPT-4时刻
视频地址:
https://www.youtube.com/watch?v=vO1wnHA0tZg
Figure AI 公司主页:

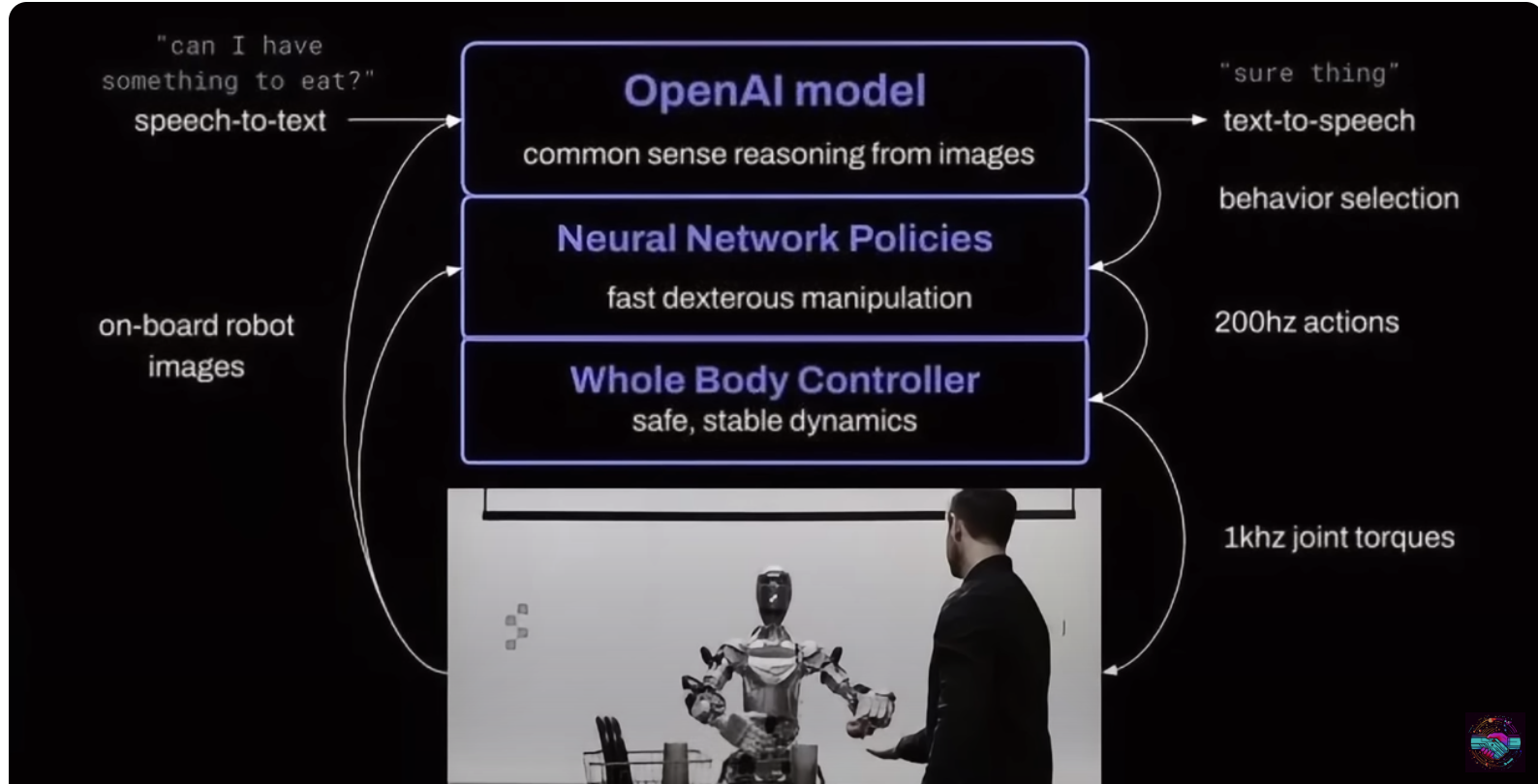
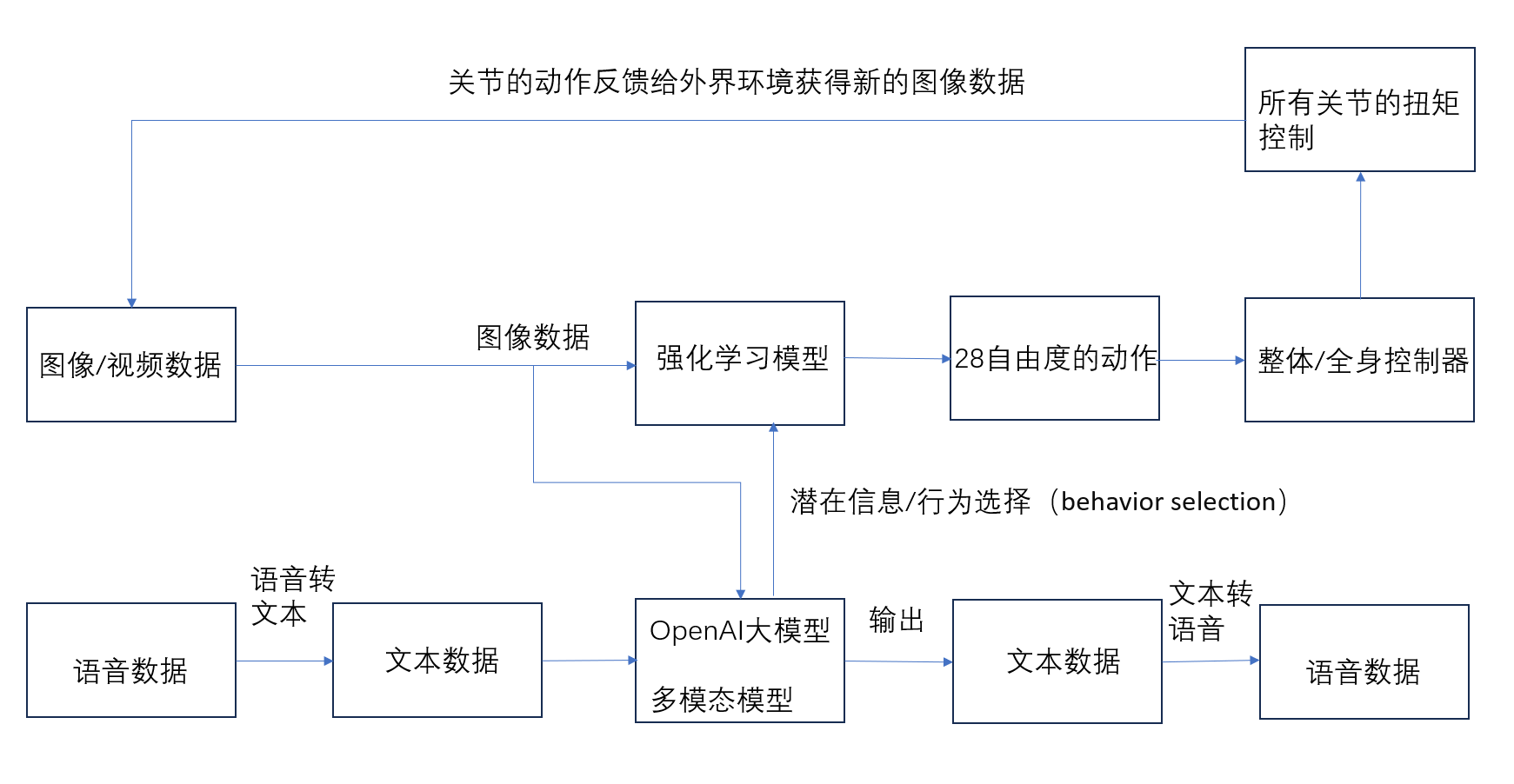
根据Figure 01机器人的工作示意图可以得到下面的流程示意图:
人形机器人可以分为软件和硬件两部分,硬件部分包括电子控制、机械设计制造、电池、电机设计/控制、传感器,等等;软件包括图像识别模块(物体识别)、语音识别模块、语音转文字模块/文字转语音模块、大模型的对话系统模块、大模型的多模态系统模块、导航模块(SLAM等)、3D点云(计算机视觉)、NeRF(Neural Radiance Fields)(计算机视觉)、强化学习(智能决策),等等。
需要知道,硬件是软件的载体,没有硬件的支撑软件是无法发挥作用的,很多公司搞humanoid的主要桎梏是硬件而不是软件,但是硬件往往需要耗费主要的费用和精力,并且硬件的发展是极有可能被其他公司的技术替代掉的(某公司新设计一个电源、某公司新设计一个扭矩更好的电机、某公司新设计一个灵敏度更高的机械手,等等),可以说搞人形机器人的真正的门槛其实是硬件而不是软件。
但是硬件往往费用高,积累多,设计周期长,如果一个公司的目标不是自己搞出一个可以面世的人形机器人,而是要做这方面的积累和尝试,也或者是想要入门这个领域,那么可以从软件层面上先入手,比较人形机器人的软件领域也是要求极难其极为广泛的。
可以说,人形机器人的软件层面其实只有:
- 视觉模块/导航模块;
- 语言模块;
- 决策模块;
视觉模块,可以有3D点云(计算机视觉)、NeRF(Neural Radiance Fields)等等;导航模块,如:SLAM等等,但是由于导航模块可以和视觉模块耦合在一起,,并且导航模块往往可以和决策模块或规划模块耦合在一起,所以导航模块可以不单独列成一个模块。
语言模块,这里是指大模型,但是往往语言模块和视觉模块也有很强的耦合,比如都交给多模态大模型模块处理。人形机器人的直接输入输出并不是语言而是语音,因此我们还需要语音与语言转换模块。
决策模块,根据视觉模块和语言模块提供的信息,也包括从导航系统提供的模块,也包括从多模态模糊提供的信息,得到下一步动作,该动作往往不是对电机的扭矩的直接控制,而是电压等信息,这个动作还需要交给电子控制器转为扭矩控制信息,最终的扭矩信息交给电机进行具体执行。
人形机器人 —— Figure 01机器人亮相 | OpenAI多模态能力加持 | 与人类流畅对话交互 | 具身智能的GPT-4时刻的更多相关文章
- 微信机器人 返现机器人 pc版本 移动版本 java开发 小范省钱
微信机器人 返现机器人 pc版本 移动版本 java开发 小范省钱 微信搜索微信号 fanli-x 或 扫描下方二维码,可查看效果. 非web版微信,pc/移动版微信 支持新号24小时 不封号! 有任 ...
- 图灵机器人(问答机器人)API调用示例
问答机器人API文档:https://www.juhe.cn/docs/api/id/112 先上图: 说下大致实现的步骤: 1.首先使用了聚合数据的sdk,这样免费使用的数目可以多一些 2.使用gs ...
- 酷Q机器人,QQ机器人使用教程
软件介绍: 酷Q,软件酷Q机器人是一款基于webqq开发的一款自动接收.处理qq消息的软件. 改程序使用易语言编写,精简大量不必要代码,减小了软件体积,优化程序速度,使得酷Q更加轻巧好用. 在消息处理 ...
- 调用聊天机器人 -小I机器人
public static string sendMsg2(string msg) { try { msg = Uri.EscapeDataString( msg); string sUrl = &q ...
- AIGC时代:未来已来
摘要:人工智能的快速发展使得我们进入了AIGC时代.AIGC时代的到来,将会带来巨大的机遇和挑战. 本文分享自华为云社区<GPT-4发布,AIGC时代的多模态还能走多远?系列之一: AIGC时代 ...
- NAO机器人
NAO机器人是Aldebaran Robotics公司研制的一款人工智能机器人.它拥有着讨人喜欢的外形,并具备有一定程度的人工智能和约一定程度的情感智商并能够和人亲切的互动. 教学研究类/NAO机器人 ...
- AI 影评家:用 Hugging Face 模型打造一个电影评分机器人
本文为社区成员 Jun Chen 为 百姓 AI 和 Hugging Face 联合举办的黑客松所撰写的教程文档,欢迎你阅读今天的第二条推送了解和参加本次黑客松活动.文内含有较多链接,我们不再一一贴出 ...
- ROS(indigo) 安装和使用更新版本的Gazebo----3,4,5,6,7 附:中国机器人大赛中型组仿真比赛说明
ROS(indigo) 安装和使用更新版本的Gazebo,本文以7为例. Gazebo7支持更多新的功能,如果使用下面命令安装ROS(indigo): ~$ sudo apt-get install ...
- python 全栈开发,Day123(图灵机器人,web录音实现自动化交互问答)
昨日内容回顾 . 百度ai开放平台 . AipSpeech技术,语言合成,语言识别 . Nlp技术,短文本相似度 . 实现一个简单的问答机器人 . 语言识别 ffmpeg (目前所有音乐,视频领域,这 ...
- 图灵机器人,web录音实现自动化交互问答
一.图灵机器人 介绍 图灵机器人 是以语义技术为核心驱动力的人工智能公司,致力于“让机器理解世界”,产品服务包括机器人开放平台.机器人OS和场景方案. 官方地址为: http://www.tuling ...
随机推荐
- java小记-scanner
不想打字也是我的罪过吗? 作业2: 老师的代码: 结果 我的代码看起来冗余: 想说的: 我的本意是以为scanner只能记录一个数,然后就想着输入两次就能算两个数了,但没想到人家只是让你输就完了.不要 ...
- SpringBoot系列(五) 接口校验(非空、非法字符/特殊字符、长度等)
1.引入pom依赖 <dependency> <groupId>javax.validation</groupId> <artifactId>valid ...
- MySql 中 select 使用
MySql select 多种查询方式 前言 在数据库使用过程中,使用最多的场景就是查询数据,所以今天我们总结一下常用用的查询 简单查询 带条件查询 多条件查询 输出指定字段查询 分组查询 查询结果排 ...
- 未能加载文件或程序集“netstandard,Version=2.0.0.0, Culture=neutral,PublicKeyToken=cc7b13ffcd2ddd51”或它的某一个依赖项 解决
未能加载文件或程序集"netstandard,Version=2.0.0.0, Culture=neutral,PublicKeyToken=cc7b13ffcd2ddd51"或它 ...
- Masonry的进阶使用技巧
Masonry是iOS开发中常见的视图约束框架,但是有人对他的使用还是浅尝辄止,接下来会提出几点比较少见但是又十分便捷的使用技巧. mas_greaterThanOrEqualTo mas_great ...
- 关于c指针的理解
1 #include<stdio.h> 2 { 3 int a= 100,b=10; 4 int *p1=&a,*p2=&b; 5 *p1=b; 6 *p2=a; 7 pr ...
- 高通android QMI机制
高通android QMI机制 原文(有删改):https://blog.csdn.net/u012439416/category_7004974 概论 Qualcomm MSM Interface, ...
- 全志T3+FPGA国产核心板——Pango Design Suite的FPGA程序加载固化
本文主要基于紫光同创Pango Design Suite(PDS)开发软件,演示FPGA程序的加载.固化,以及程序编译等方法.适用的开发环境为Windows 7/10 64bit. 测试板卡为全志T3 ...
- Linux系统基本介绍
一.Linux系统基本介绍 [1].Linux操作系统特点 多任务的操作系统 多任务操作系统 严格区分大小写 Linux一切皆文件 所有文件的起点都是"/"根目录 对于Linux操 ...
- javaApi,mapreduce,awk,scala四种方式实现词频统计
awk方式实现词频统计: 方式一: vi wordcount.awk { for (i = 1; i <=NF;i++) //NF 表示的是浏览记录的域的个数 freq[$i]++ } END{ ...