ROS探索总结(五)——创建简单的机器人模型smartcar
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础。
一、创建硬件描述包
- roscreat-pkg smartcar_description urdf
二、智能车尺寸数据
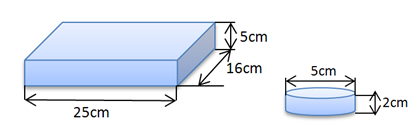
三、建立urdf文件
在urdf文件夹下创建文件 smartcar.urdf,标签属性如下:
<link> 一个link对应模型的一个模块,可以通过标签 joint 让子模块与 base_link 进行关联
|——<visual> 描述一个link的外观,大小,颜色,材质纹理等
|——|——<geometry> 定义该link的几何模型,包含该几何模型的尺寸,单位:米
|——|——|——<box> 矩形,定义属性:size(包含长宽高,数据用空格隔开)
|——|——|——<cylinder> 圆柱体,定义属性:1、length,2、radius
|——|——|——<sphere> 球体,定义属性:radius
|——|——<material> 定义颜色和透明度(RGBA),取值区间 [0,1]
|——<collision> 描述碰撞检测属性
- <?xml version="1.0"?>
- <robot name="smartcar">
- <link name="base_link">
- <visual>
- <geometry>
- <box size="0.25 .16 .05"/>
- </geometry>
- <origin rpy="0 0 1.57075" xyz="0 0 0"/>
- <material name="blue">
- <color rgba="0 0 .8 1"/>
- </material>
- </visual>
- </link>
- <link name="right_front_wheel">
- <visual>
- <geometry>
- <cylinder length=".02" radius="0.025"/>
- </geometry>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <joint name="right_front_wheel_joint" type="continuous">
- <axis xyz="0 0 1"/>
- <parent link="base_link"/>
- <child link="right_front_wheel"/>
- <origin rpy="0 1.57075 0" xyz="0.08 0.1 -0.03"/>
- <limit effort="100" velocity="100"/>
- <joint_properties damping="0.0" friction="0.0"/>
- </joint>
- <link name="right_back_wheel">
- <visual>
- <geometry>
- <cylinder length=".02" radius="0.025"/>
- </geometry>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <joint name="right_back_wheel_joint" type="continuous">
- <axis xyz="0 0 1"/>
- <parent link="base_link"/>
- <child link="right_back_wheel"/>
- <origin rpy="0 1.57075 0" xyz="0.08 -0.1 -0.03"/>
- <limit effort="100" velocity="100"/>
- <joint_properties damping="0.0" friction="0.0"/>
- </joint>
- <link name="left_front_wheel">
- <visual>
- <geometry>
- <cylinder length=".02" radius="0.025"/>
- </geometry>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <joint name="left_front_wheel_joint" type="continuous">
- <axis xyz="0 0 1"/>
- <parent link="base_link"/>
- <child link="left_front_wheel"/>
- <origin rpy="0 1.57075 0" xyz="-0.08 0.1 -0.03"/>
- <limit effort="100" velocity="100"/>
- <joint_properties damping="0.0" friction="0.0"/>
- </joint>
- <link name="left_back_wheel">
- <visual>
- <geometry>
- <cylinder length=".02" radius="0.025"/>
- </geometry>
- <material name="black">
- <color rgba="0 0 0 1"/>
- </material>
- </visual>
- </link>
- <joint name="left_back_wheel_joint" type="continuous">
- <axis xyz="0 0 1"/>
- <parent link="base_link"/>
- <child link="left_back_wheel"/>
- <origin rpy="0 1.57075 0" xyz="-0.08 -0.1 -0.03"/>
- <limit effort="100" velocity="100"/>
- <joint_properties damping="0.0" friction="0.0"/>
- </joint>
- <link name="head">
- <visual>
- <geometry>
- <box size=".02 .03 .03"/>
- </geometry>
- <material name="white">
- <color rgba="1 1 1 1"/>
- </material>
- </visual>
- </link>
- <joint name="tobox" type="fixed">
- <parent link="base_link"/>
- <child link="head"/>
- <origin xyz="0 0.08 0.025"/>
- </joint>
- </robot>
四、建立launch命令文件
- <launch>
- <arg name="model" />
- <arg name="gui" default="False" />
- <param name="robot_description" textfile="$(find smartcar_description)/urdf/smartcar.urdf" />
- <param name="use_gui" value="$(arg gui)"/>
- <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
- <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
- <node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/urdf.vcg" />
- </launch>
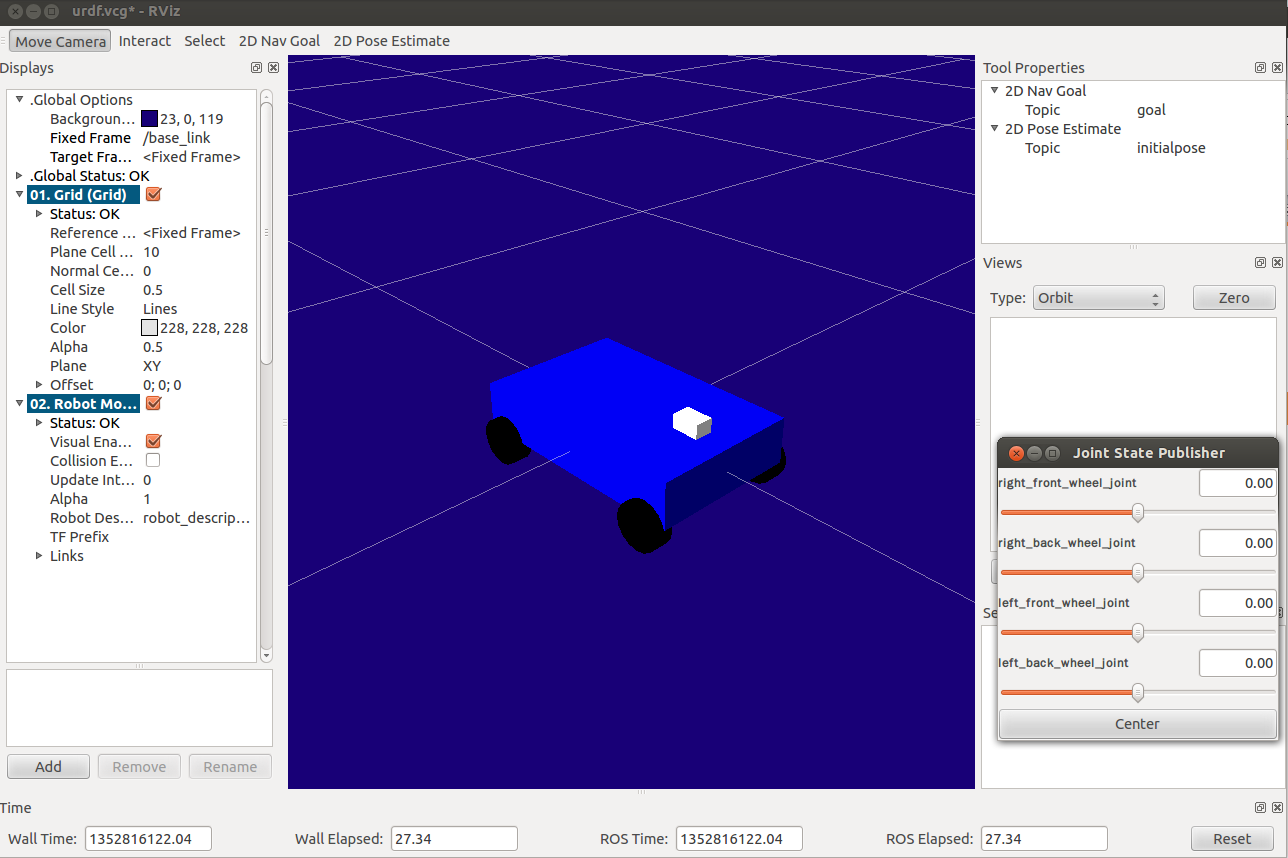
五、效果演示
- roslaunch smartcar_description base.urdf.rviz.launch gui:=true
----------------------------------------------------------------
欢迎大家转载我的文章。
转载请注明:转自古-月
ROS探索总结(五)——创建简单的机器人模型smartcar的更多相关文章
- 【kinetic】操作系统探索总结(五)创建简单的机器人模型smartcar
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify } a:link { color: r ...
- 创建简单的机器人模型smartcar
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人 smartcar,为后面建立复杂机器人打下基础. 一.创建硬件描述包. cd ~/catkin_ws/srcroscr ...
- ROS学习记录(一)————创建简单的机器人模型smartcar
这是我在古月居上找的(http://www.guyuehome.com/243),但直接运行的话,没办法跑起来,我也是查了好多博客和日志,才实现最后的功能的,所以,记录下来,以备后用吧,也欢迎其他和我 ...
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- Melodic 使用URDF创建简单的机器人模型
本人Linux版本:Ubuntu 18.04LTS ROS版本:Melodic URDF代码 <?xml version="1.0" ?> <robot name ...
- ROS探索总结(十九)——如何配置机器人的导航功能
1.概述 ROS的二维导航功能包,简单来说,就是根据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令.但是,如何在特定的机器人上实现导航功能包的功能, ...
- ROS探索总结(十九)——怎样配置机器人的导航功能
1.概述 ROS的二维导航功能包.简单来说.就是依据输入的里程计等传感器的信息流和机器人的全局位置,通过导航算法,计算得出安全可靠的机器人速度控制指令. 可是,怎样在特定的机器人上实现导航功能包的功能 ...
- ROS探索总结(十七)——构建完整的机器人应用系统
上一篇博客介绍了HRMRP机器人平台的设计,基于该平台,可以完成丰富的机器人应用,以较为典型的机器人导航为例,如何使用HRMRP来完成相应的功能?本篇博客将详细介绍如何将HRMRP应用到 ...
- ROS探索总结(十八)——重读tf
在之前的博客中,有讲解tf的相关内容,本篇博客重新整理了tf的介绍和学习内容,对tf的认识会更加系统. 1 tf简介 1.1 什么是tf tf是一个让用户随时间跟踪多个参考系的功能包,它使用一种树型数 ...
随机推荐
- EXCEL对比重复数据
一. EXCEL 突出重复项 1. 选择对应的数据 EXCEL 里选择好数据 2. 选择条件格式 这样就完成了数据重复的突出,可以按条件筛选.选择自己想要的数据
- svn文件大小类型限制,提交必须加多少字的说明
#!/bin/sh REPOS="$1" TXN="$2" #此处更改大小限制,这里是5M MAX_SIZE= #此处增加限制文件后缀名 FILTER='\.( ...
- LeetCode OJ:Binary Tree Level Order Traversal(二叉树的层序遍历)
Given a binary tree, return the level order traversal of its nodes' values. (ie, from left to right, ...
- LeetCode OJ:Contains DuplicateII(是否包含重复II)
Given an array of integers and an integer k, find out whether there are two distinct indices i and j ...
- Microsoft Visual Studio Ultimate 2013 RC 离线安装程序
Microsoft Visual Studio Ultimate 2013 RC 离线安装程序 ☆ 微软官网地址:☆ http://www.microsoft.com/en-us/download/d ...
- LKDBHelper Sqlite操作数据库
首先这里要说明一下,为什么用FMDB而不用Core Data呢,因为我们不知道Core Data是如何映射对象里面的属性关系的,如果我们更改了属性的话,就会报错 首先是创建LKDBHelper对象 L ...
- Zeroc Ice 负载均衡之Icegrid simple
最近学习Icestorm的replicated例子,在本地计算机上面跑通了,但在两台机器上(一台服务器192.168.0.113,一台客户端192.168.0.188),怎么都跑不通.上网求助,大家给 ...
- HDU - 5306: Gorgeous Sequence (势能线段树)
There is a sequence aa of length nn. We use aiai to denote the ii-th element in this sequence. You s ...
- js 自定义方法 设置可选参数的方法
原链接 http://www.cnblogs.com/RightDear/p/3156652.html PHP有个很方便的用法是在定义函数时可以直接给参数设默认值,如: function simue ...
- mysql之 percona-xtrabackup 2.4.7安装(热备工具)
准备:os是centos6.7,提前下载并上传 percona-xtrabackup 安装包,下载网址为: https://www.percona.com/downloads/XtraBackup/L ...