【kinetic】操作系统探索总结(五)创建简单的机器人模型smartcar
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify }
a:link { color: rgba(0, 0, 255, 1) }
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础。
一、创建硬件描述包
01. cd ~/catkin_ws/src
02. catkin_create_pkg smartcar_description std_msgs rospy roscpp urdf (roscreat-pkg为旧版本中的命令,虽然在kinetic中也可以使用,但是还是使用catkin_create_pkg比较好,在书中没有添加std_msgs等依赖项,但是实际所测加上上面的几个依赖项才行。)
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify }
a:link { color: rgba(0, 0, 255, 1) }
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify }
a:link { color: rgba(0, 0, 255, 1) }
二、智能车尺寸数据
因为建立的是一个非常简单的机器人,所以我们尽量使用简单的元素:使用长方体代替车模,使用圆柱代替车轮,具体尺寸如下:

三、建立urdf文件
在smartcar_description文件夹下建立urdf文件夹,创建智能车的描述文件.urdf,描述代码如下:
<?xml version="1.0"?>
<robot name="smartcar"> <link name="base_link">
<visual> <geometry>
<box size="0.25 .16 .05"/>
</geometry> <origin rpy="0 0 1.57075" xyz="0 0 0"/>
<material name="blue">
<color rgba="0 0 .8 1.3"/>
</material>
</visual>
</link> <link name="right_front_wheel"> <visual> <geometry>
<cylinder length=".02" radius="0.025"/>
</geometry> <material name="black">
<color rgba="0 0 0 1"/>
</material> </visual>
</link> <joint name="right_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint> <link name="right_back_wheel">
<visual>
<geometry>
<cylinder length=".02" radius="0.025"/>
</geometry> <material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link> <joint name="right_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="right_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint> <link name="left_front_wheel"> <visual> <geometry>
<cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link> <joint name="left_front_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_front_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 0.1 -0.03"/>
<limit effort="100" velocity="100"/> <joint_properties damping="0.0" friction="0.0"/>
</joint> <link name="left_back_wheel">
<visual> <geometry> <cylinder length=".02" radius="0.025"/>
</geometry>
<material name="black"> <color rgba="0 0 0 1"/> </material>
</visual>
</link> <joint name="left_back_wheel_joint" type="continuous">
<axis xyz="0 0 1"/>
<parent link="base_link"/>
<child link="left_back_wheel"/>
<origin rpy="0 1.57075 0" xyz="-0.08 -0.1 -0.03"/>
<limit effort="100" velocity="100"/>
<joint_properties damping="0.0" friction="0.0"/>
</joint> <link name="head">
<visual>
<geometry>
<box size=".02 .03 .03"/>
</geometry> <material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link> <joint name="tobox" type="fixed">
<parent link="base_link"/>
<child link="head"/>
<origin xyz="0 0.08 0.025"/>
</joint>
</robot>
四、建立launch命令文件
在smartcar_description文件夹下建立launch文件夹,创建智能车的描述文件
base.urdf.rviz.launch,描述代码如下:
<launch>
<arg name="model"/>
<arg name="gui" default="False"/>
<param name="robot_description" textfile="$(find smartcar_description)/urdf/smartcar.urdf"/>
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
</node> <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher"/> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find urdf_tutorial)/rviz/urdf.rviz"/>
</launch>
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify }
a:link { color: rgba(0, 0, 255, 1) }
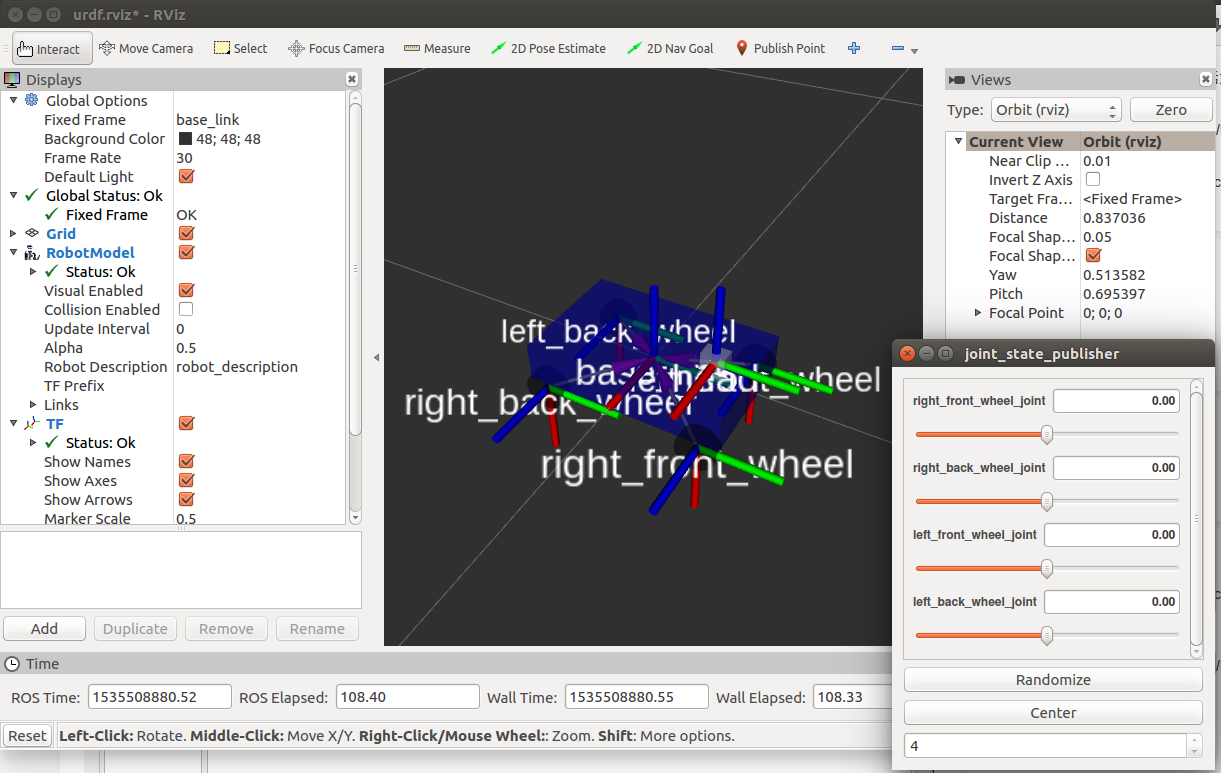
五、效果演示
在终端中输入显示命令:
01. roslaunch smartcar_description base.urdf.rviz.launch gui:=true
显示效果如下图所示,使用gui中的控制bar可以控制四个轮子单独旋转。
【kinetic】操作系统探索总结(五)创建简单的机器人模型smartcar的更多相关文章
- ROS探索总结(五)——创建简单的机器人模型smartcar
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础. 一.创建硬件描述包 roscreat-pkg smartcar_de ...
- 创建简单的机器人模型smartcar
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人 smartcar,为后面建立复杂机器人打下基础. 一.创建硬件描述包. cd ~/catkin_ws/srcroscr ...
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- ROS学习记录(一)————创建简单的机器人模型smartcar
这是我在古月居上找的(http://www.guyuehome.com/243),但直接运行的话,没办法跑起来,我也是查了好多博客和日志,才实现最后的功能的,所以,记录下来,以备后用吧,也欢迎其他和我 ...
- Melodic 使用URDF创建简单的机器人模型
本人Linux版本:Ubuntu 18.04LTS ROS版本:Melodic URDF代码 <?xml version="1.0" ?> <robot name ...
- Android开发艺术探索第五章——理解RemoteViews
Android开发艺术探索第五章--理解RemoteViews 这门课的重心在于RemoteViews,RemoteViews可以理解为一种远程的View,其实他和远程的Service是一样的,Rem ...
- Web Service 的创建简单编码、发布和部署
最近,老大准备将已有的C/S架构项目中的通信部分做成通用,需要将其支持WebService为以后项目向着B/S架构升级做好铺垫,为此身为屌丝的我去各种百度WebService是个什么卵玩意,然后逐渐搭 ...
- javaweb学习总结(二十五)——jsp简单标签开发(一)
一.简单标签(SimpleTag) 由于传统标签使用三个标签接口来完成不同的功能,显得过于繁琐,不利于标签技术的推广, SUN公司为降低标签技术的学习难度,在JSP 2.0中定义了一个更为简单.便于编 ...
- Intellij创建简单Springboot项目
Intellij创建简单Springboot项目 第一步:选择创建新项目——file-new-project 第二步:选择项目类型——Spring Initializr-next 第三步:输入项目信息 ...
随机推荐
- gradle插件版本号和Gradle版本号对应关系
Plugin version Required Gradle version 1.0.0 - 1.1.3 2.2.1 - 2.3 1.2.0 - 1.3.1 2.2.1 - 2.9 1.5.0 2.2 ...
- 第7章 Python类型、类、协议 第7.1节 面向对象程序设计的相关知识
Python被视为一种面向对象的语言,在介绍Python类相关的内容前,本节对面向对象程序设计相关的概念进行简单介绍. 一. 类和对象(实例) 在面向对象的程序设计(OOP)过程中有两个重要概念 ...
- 第15.22节 PyQt(Python+Qt)入门学习:Model/View架构详解
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 一.简介 在PyQt和Qt中,Model/View架构是图形界面开发时用于管理数据和界面展现方式的关 ...
- Python学习随笔:获取当前主机名和用户名的方法
在Python中,要获取当前主机的主机名和登录用户名很简单: 使用os.getlogin():返回当前登录用户名 使用socket.gethostname():返回当前机器主机名 代码如下: > ...
- PyQt(Python+Qt)学习随笔:Qt Designer中主窗口对象dockNestingEnabled属性
dockNestingEnabled 属性是确认主窗口的浮动部件(dock widget)是否允许嵌套的一个属性. 如果此属性为False,则浮动部件停靠区域只能包含一个浮动部件(水平或垂直).如果此 ...
- PyQt(Python+Qt)学习随笔:Designer中的QDialogButtonBox的ButtonRole详解
一.引言 在Designer中创建的QDialogButtonBox对应的Button,都有指定的ButtonRole,而我们创建自定义的Button加入到QDialogButtonBox中去时,也需 ...
- C++详解(8-9)
八. C++函数的高级特性 对比于C语言的函数,C++增加了重载(overloaded).内联(inline).const和virtual四种新机制.其中重载和内联机制既可用于全局函数也可用于类的成员 ...
- Spring RestTemplate具备负载均衡功能
在创建RestTemplate的Bean时使用@LoadBalanced注解, 就可以自动配置为使用ribbon.如下面的示例所示: @Configuration public class MyCo ...
- #2020征文-开发板#SYS_RUN()和MODULE_INIT()之间的那些事
接触鸿蒙设备开发有一段时间了,也是时候好好挖一挖鸿蒙设备程序的启动流程了. 破冰问题:鸿蒙设备程序从哪里开始运行的? 相信大家都已经非常清楚了,鸿蒙设备程序需要指定入口函数,具体表现在代码层面就是通过 ...
- redis学习之——在分布式数据库中CAP原理CAP+BASE
分布式系统 分布式系统(distributed system) 由多台计算机和通信的软件组件通过计算机网络连接(本地网络或广域网)组成.分布式系统是建立在网络之上的软件系统.正是因为软件的特性,所以分 ...