图说论文《LSM-based Storage Techniques: A Survey》
本文从 《LSM-based Storage Techniques: A Survey》 摘取部分图片,来介绍 LSM tree 的相关内容。详细内容请查看论文原文。
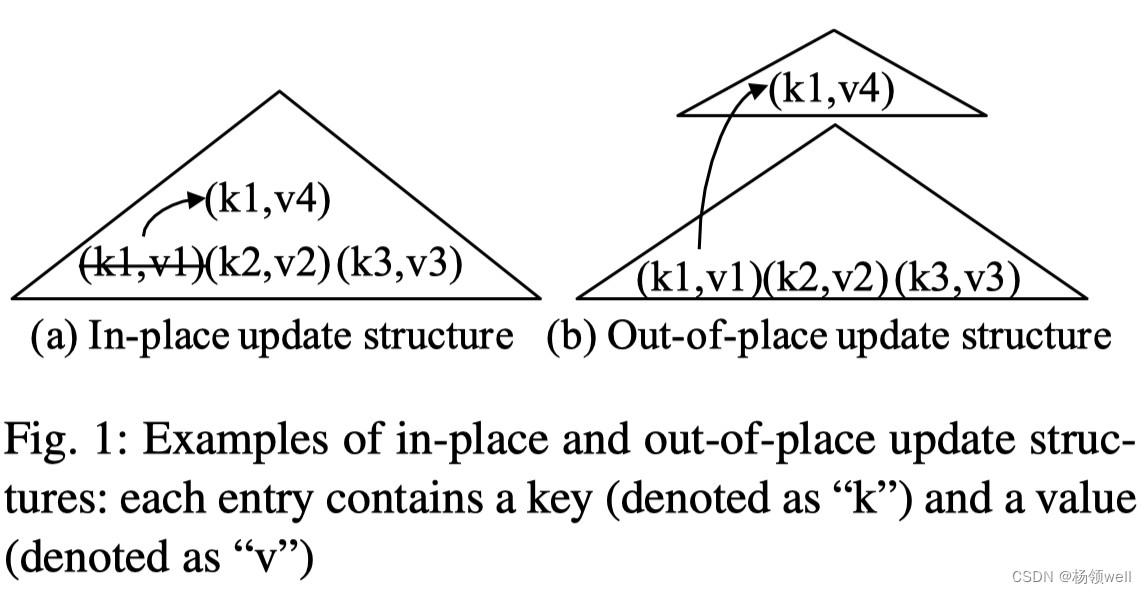
in-place update V.S. out-of-place update
- 索引结构通常有两种数据的更新策略:in-place update 和 out-of-place update。
- in-place update:在原数据处覆盖写入,e.g. B+树。该策略读性能较好(只需要读一份数据);随机 IO导致写性能较差;空间碎片导致空间利用率下降。
- out-of-place update:在新的地方写入更新后的数据(原数据不做变更), e.g. LSM tree。与 in-place update 相反,该策略写性能较好(顺序写);同一份数据保存多份导致读性能较差;顺序写减少空间碎片从而提高空间利用率。
LSM-tree 基本原理
- LSM-tree 包含 C0, C1, …, Ck 共 k+1 层, 每一层的数据都是 B+ 树。其中 C0 层维护在内存中,而 C1, …, Ck 层维护在磁盘。
- Write 操作: 每次写入数据都只写入 C0 层。
- Point Query 操作:每次点查询操作会依次遍历 C0, C1, …, Ck, 返回查询到最新版本的数据。如果遍历完之后都没有查到数据,则该数据不存在。比如, 查询
key = b的值, 在 C0 层查到b=2, 直接返回该值,而不用继续遍历 C1, …, Ck。 - Range Query 操作:范围查询会并发的在 C0, C1, …, Ck 查找指定范围的数据,然后根据优先级从高到低将每层的查询结果合并为最终的查询结果。 比如,查询结果为
<C0, a=1, b=2>, <C1, b=3, c=3>, 合并之后的最终结果为a=1, b=2, c=3。 - Delete 操作:删除操作写入删除标记数据,由后台进程负责异步删除。
- Merge 操作:C0, C1, …, Ck 每层容量固定,依次按照一定比率递增。当某层 Ci 数据规模达到该层容量上限,后台 Merge 进程 会将该层数据合入 Ci+1 层。

Merge 策略: Leveling Merge Policy V.S. Tiering Merge Policy
注:图中的数字表示 Index 的范围。如 0-100 指 Index 在 0-100 的数据可以保存在该 component。
- Leveling Merge Policy:每一层只包含一个 component。L 层的 component 容量是 L-1 层的 T 倍。当 L 层达到其容量上限,会被合并到 L+1 层。如 Fig.3(a),L0 的数据达到上限,合入到 L1 层。
- Tiering Merge Policy:每一层最多包含 T 个 component。当 L 层达到容量上限,它的 T 个 component 会合并为 L+1 层的一个 component。如果 L 为配置的最大层,则合并后的 component 保持在该层。如 Fig.3(b), T=2, L0 层的数据达到上限,它的 2 个component 合并为了 L1 层的一个新的 component。

Partition Policy: partitioned leveling merge policy V.S. partitioned tiering merge policy
LSM-tree 有两类比较常见的优化策略:布隆过滤器(Bloom Filter)和数据分区(Partitioning)。
- 布隆过滤器(Bloom Filter):可以为每一棵 B+ 树或它的非叶子节点绑定一个布隆过滤器,以提高数据的查询效率。
- 数据分区(Partitioning):可以将每一层的 component 拆分成更小的 partition(记作: SSTable)。数据分区可以提高 merge 的效率;减少merge 过程中对磁盘空间的浪费等。
不同的 merge policy, partioning 的处理方式也有所不同。
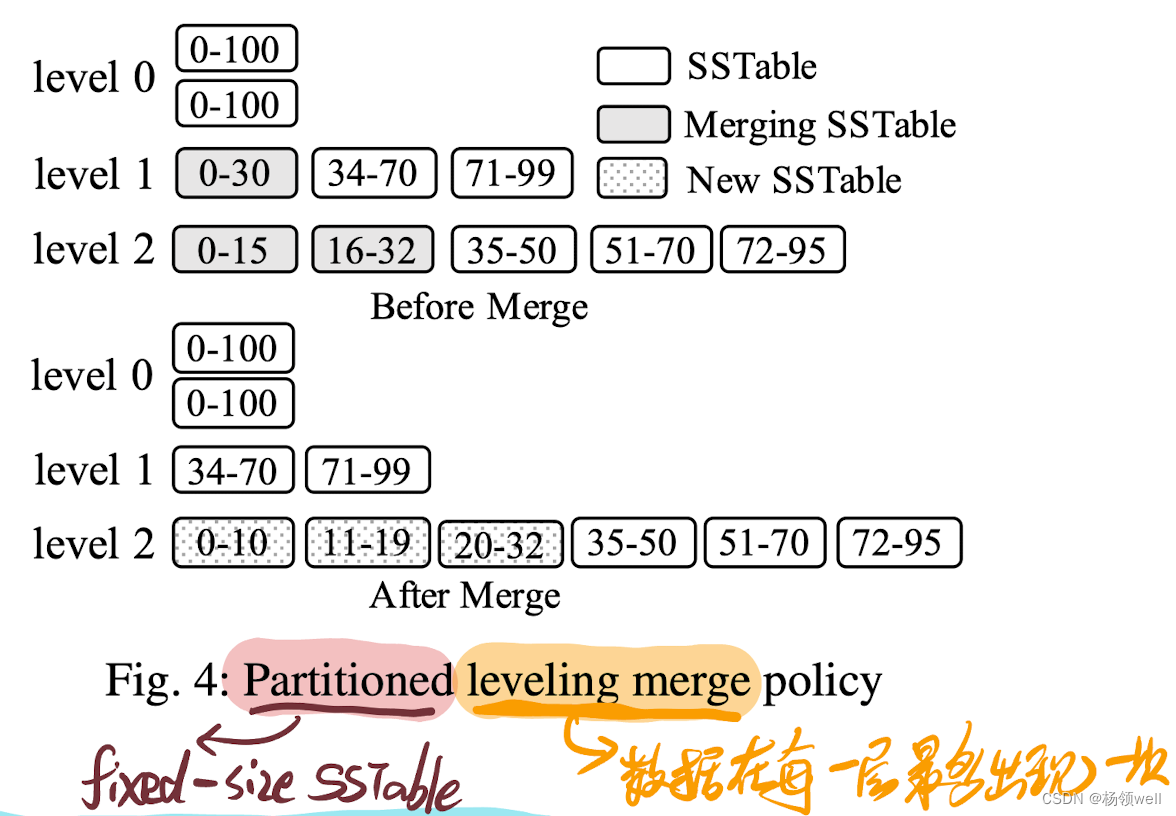
partitioned leveling merge policy
- 每一层的数据被 partition 为多个相同大小的 SSTable。
- L0 数据直接从内存 flush 而来,因此不需要进行 partition。
- 读写操作与非 partitioned 的 leveling merge policy 一致。
- Merge 流程: 将 L 层一个 SSTable merge 到 L+1 层,需要将 L+1 层所有和该 SSTable 有重叠 Index 的 SSTable 一起,合并为 L+1 层新的 SSTable。如 Fig.4 Merge 0-30(L1) 到 L2。L2 层与它 Index 有重叠的 SSTable 有 0-15(L2) 和 16-32(L2)。将0-30(L1), 0-15(L2) 和 16-32(L2) 三个 SSTable 一起合并为 L2 层新的 SSTable: 0-10(L2), 11-19(L2) 和 20-32(L2)。
partitioned tiering merge policy: vertical grouping V.S. horizontal grouping
tiering merge policy 将每层的数据分成不同的 Group 进行处理。将重合 Index 的 SSTable 拆分到同一个 Group 的策略称为 vertical grouping policy;将不重合 Index 的 SSTable 拆分到同一个 Group 的策略称为 horizontal grouping policy。
partitioned tiering with vertical grouping
- 每一层的 SSTable 被拆分为 Index 互相重叠的 Group。
- Merge 操作:Fig.5 中, 0-31(L1), 0-30(L1) 中的 Index 在 0-15(可能) 部分 merge 为 0-13(L2) 所在 Group 的一个 SSTable,即 0-12(L2);其 Index 在 16-34(可能) 部分 merge 到 16-32(L2) 所在 Group 的一个 SSTable,即 17-31(L2)。
- 查询操作: 在该策略下,每一层的查询操作需要查询该层 Index 覆盖的 Group 下的所有 SSTable 的情况。
- 在这种策略下,上一层相同 Group 的 SSTable 需要 Merge 到下一层 Index 重叠的 Group 内,SSTable 大小不再固定。

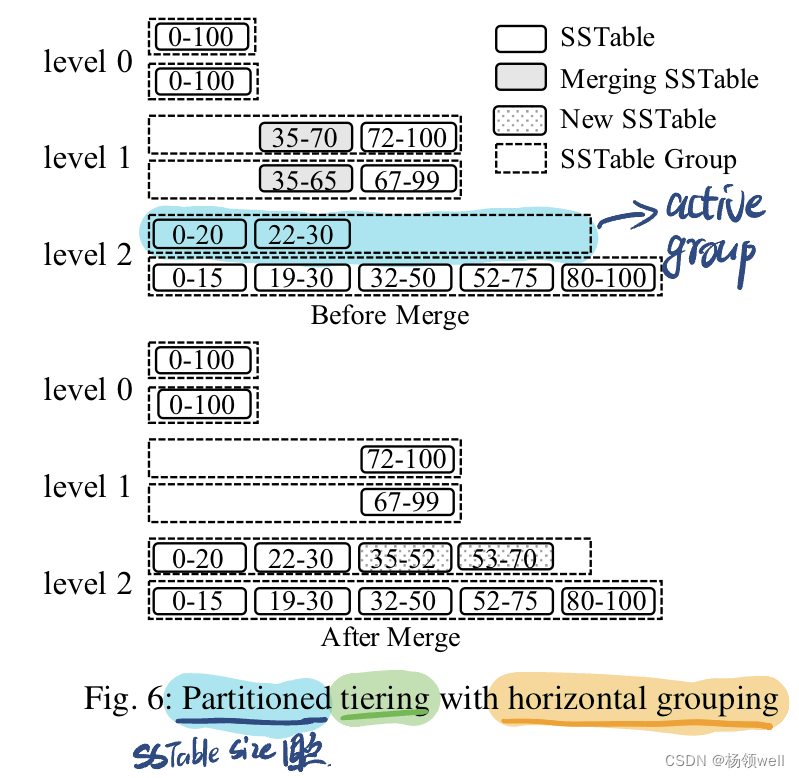
partitioned tiering with horizontal grouping
每一层大小固定的的 SSTable 被拆分为 Index 互不重叠的 Group。
每一层包含一个接受上一层合入进来的新 SSTable 的 Group,称之为 active group。
Merge 操作: 合并 L 层的某个 SSTable 时, 选择该层所有其他 group 中与其 Index 重叠的 SSTable,合并到 L+1 层 active group 中。 如 Fig.6, 选择该层其他 Group 与 35-70(L1) Index 重叠的 SSTable,即 35-65(L1)。将35-70(L1),35-65(L1) 合并到 L2 层的 active group 中,即 35-52(L2) 和 53-70(L2)。
Reference
图说论文《LSM-based Storage Techniques: A Survey》的更多相关文章
- 论文阅读笔记 Word Embeddings A Survey
论文阅读笔记 Word Embeddings A Survey 收获 Word Embedding 的定义 dense, distributed, fixed-length word vectors, ...
- 【RS】Deep Learning based Recommender System: A Survey and New Perspectives - 基于深度学习的推荐系统:调查与新视角
[论文标题]Deep Learning based Recommender System: A Survey and New Perspectives ( ACM Computing Surveys ...
- 论文笔记: Deep Learning based Recommender System: A Survey and New Perspectives
(聊两句,突然记起来以前一个学长说的看论文要能够把论文的亮点挖掘出来,合理的进行概括23333) 传统的推荐系统方法获取的user-item关系并不能获取其中非线性以及非平凡的信息,获取非线性以及非平 ...
- 论文笔记: Matrix Factorization Techniques For Recommender Systems
Recommender system strategies 通过例子简单介绍了一下 collaborative filtering 以及latent model,这两个方法在之前的博客里面介绍过,不累 ...
- 【万字长文】使用 LSM Tree 思想实现一个 KV 数据库
目录 设计思路 何为 LSM-Treee 参考资料 整体结构 内存表 WAL SSTable 的结构 SSTable 元素和索引的结构 SSTable Tree 内存中的 SSTable 数据查找过程 ...
- 浅析Hadoop文件格式
Hadoop 作为MR 的开源实现,一直以动态运行解析文件格式并获得比MPP数据库快上几倍的装载速度为优势.不过,MPP数据库社区也一直批评Hadoop由于文件格式并非为特定目的而建,因此序列化和反序 ...
- hadoop 原理: 浅析Hadoop文件格式
Hadoop 作为MR 的开源实现,一直以动态运行解析文件格式并获得比MPP数据库快上几倍的装载速度为优势.不过,MPP数据库社区也一直批评Hadoop由于文件格式并非 为特定目的而建,因此序列化和反 ...
- 《Object Storage on CRAQ: High-throughput chain replication for read-mostly workloads》论文总结
CRAQ 论文总结 说明:本文为论文 <Object Storage on CRAQ: High-throughput chain replication for read-mostly wor ...
- PayPal高级工程总监:读完这100篇论文 就能成大数据高手(附论文下载)
100 open source Big Data architecture papers for data professionals. 读完这100篇论文 就能成大数据高手 作者 白宁超 2016年 ...
- 近年Recsys论文
2015年~2017年SIGIR,SIGKDD,ICML三大会议的Recsys论文: [转载请注明出处:https://www.cnblogs.com/shenxiaolin/p/8321722.ht ...
随机推荐
- C温故补缺(十六):未定义行为
未定义行为 在计算机程序设计中,未定义行为是指执行某种计算机代码 所产生的结果,这种代码在当前程序状态下的行为在其所使用的语言标准中没有规定. 以C语言为例,未定义行为指C语言标准未作规定的行为,同时 ...
- 关于仿照js写python算法
前言 我们学校的统一认证的登录系统,用了一套不知道哪弄来的 js加密算法 (我已经查到了,应该是出自这里 地址),有一个参数是通过 js 计算得到的,无奈我先想模拟登录就必须解决这个算法,这个说明是d ...
- ArcGISServer 10.4 虚拟机 安装 新建站点失败 Failed to configure the server machine ''. Server machine '' is not a local
在通过 VMware 创建的虚拟机上(win7 64位)安装ArcServer 10.4,新建站点时出现下面的错误. Failed to configure the server machine ' ...
- MySQL库,表,数据的操作
数据库的操作 1. 创建数据库 create database [if not exists] `数据库名` charset=字符编码(utf8mb4); 如果多次创建会报错 如果不指定字符编码,默认 ...
- 互联网最全cka真题解析-2022
1.CKA真题解析kubectl自动补全及帮助信息1.配置kubectl自动补全apt install bash-completion source <(kubectl completion b ...
- pycharm 2021.2.1专业版破解
1.网址:https://gitee.com/pengzhile/ide-eval-resetter 2.点击下载.下载后直接丢进pycharm中. 3.勾选.重启 .查看
- 模型驱动设计的构造块(上)——DDD
为了保证软件实践得简洁并且与模型保持一致,不管实际情况如何复杂,必须运用建模和设计的实践. 某些设计决策能够使模型和程序紧密结合在一起,互相促进对方的效用.这种结合要求我们注意每个元素的细节,对细节问 ...
- 几种数据库jar包获取方式
摘要:以下提供的都是各个数据库较为官方的jar包获取方式. 本文分享自华为云社区<JDBC连接相关jar包获取及上传管理中心白名单处理>,作者:HuaWei XYe. jar包获取 以下提 ...
- NeurIPS 2022:基于语义聚合的对比式自监督学习方法
摘要:该论文将同一图像不同视角图像块内的语义一致的图像区域视为正样本对,语义不同的图像区域视为负样本对. 本文分享自华为云社区<[NeurIPS 2022]基于语义聚合的对比式自监督学习方法&g ...
- TCS34725 颜色传感器设备驱动程序
一.概述 以前的传感器是用过中断的方式进行计数的,现在已经有 I2C 通行的颜色传感器,不在需要我们像之前那样,通过计数的方式获取数据,直接通过I2C读取即可.当然有通过串口的方式获取采集数据的,串口 ...