4.1 ROS元功能包
4.1 ROS元功能包
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
首先:新建一个功能包
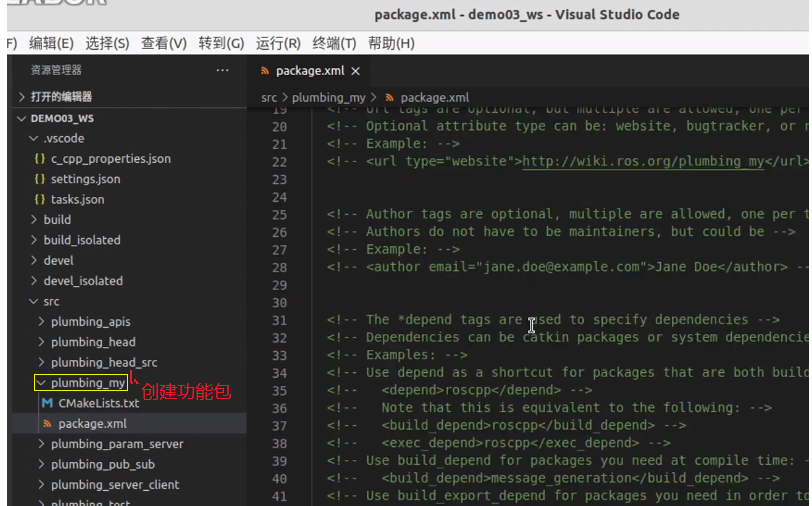
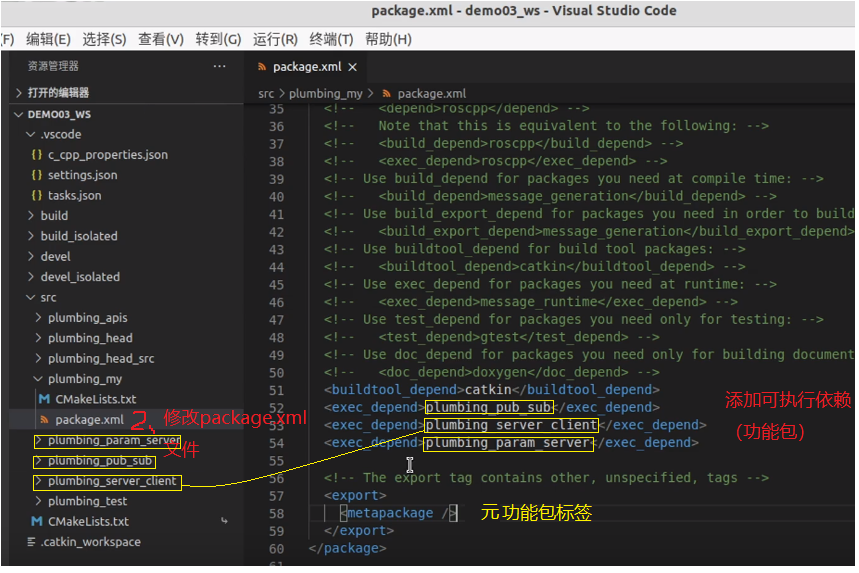
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
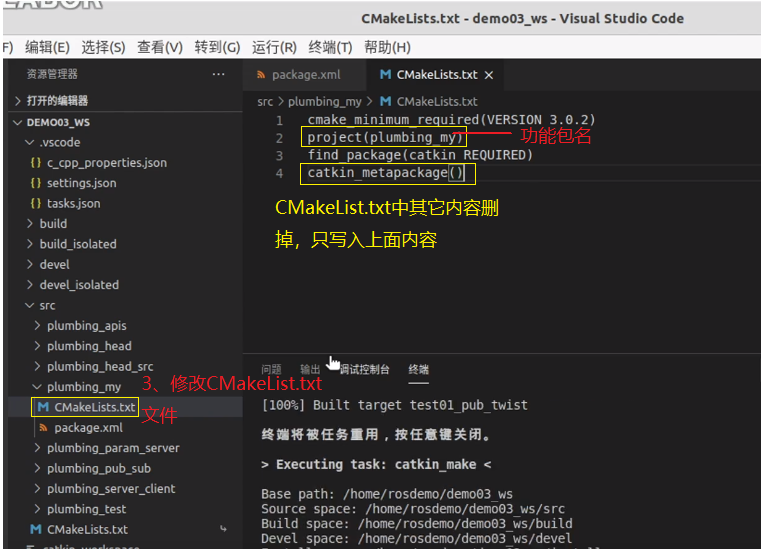
PS:CMakeLists.txt 中不可以有换行。
另请参考:
4.1 ROS元功能包的更多相关文章
- 在github上最热门好评高的ROS相关功能包
在github上最热门最受欢迎的ROS相关功能包 下面依次列出,排名不分先后: 1 Simulation Tools In ROS https://github.com/ros-simulation ...
- ROS新功能包PlotJuggler绘图
http://www.ros.org/news/2017/01/new-package-plotjuggler.html PlotJuggler,一个基于Qt的应用程序,允许用户加载,搜索和绘图数据. ...
- ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS)
ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS) 1. 网站资源: ROSwiki官网:http://wiki.ros.org/cn GitHub ...
- 创建ROS功能包(四)
为了方便直接用ROS的create-pkg命令行工具 roscreate-pkg chapter2_tutorials std_msgs rospy roscpp std_msgs 包含了常见的消息类 ...
- (转)-编写第一个ROS(创建工作空间workspace和功能包package)
原文网址:http://www.cnblogs.com/liuamin/p/5704281.html 刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配 ...
- 编写第一个ROS(创建工作空间workspace和功能包package)
刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配置好ROS. 1.创建工作空间(workspace) 我们所创建功能包package,应该全部放到一个 ...
- 在ros功能包CMakeLists.txt中获取所在功能包的路径 便于添加第三方库的相对路径
在 ros 功能包中要使用第三方的动态库,将其放在系统默认库路径和使用绝对路径均不可取,这样的话可移植性较差,将该功能包移到其它电脑时要重新配置依赖库的路径,太麻烦了. 于是找到下面这个方法,解决了R ...
- ROS功能包- rrt_exploration
一种基于RRT实现的多机器人地图探测算法的ROS软件包. 它还具有使用图像处理提取边界点.基于图像的边界检测等功能. 适用版本:indigo.jade.kinetic.lunar. 注意事项:官网文档 ...
- ROS-3 : Catkin工作空间和ROS功能包
一.创建一个Catkin工作空间 步骤一:构建catkin工作空间 安装完成ROS版本后,设置好环境变量:$ source /opt/ros/kinetic/setup.bash.然后即可创建一个ca ...
随机推荐
- 45个 GIT 经典操作场景,专治不会合代码
大家好,我是小富~ 技术交流关注公众号:程序员内点事 传送门:原文地址 git对于大家应该都不太陌生,熟练使用git已经成为程序员的一项基本技能,尽管在工作中有诸如 Sourcetree这样牛X的客户 ...
- idea中maven配置 Unable to import maven project: See logs for details
Help -> show log in Explorer 1) No implementation for org.apache.maven.model.path.PathTranslator ...
- 优达学城 UdaCity 纳米学位
优达学城 UdaCity 纳米学位 Num Course desc 1 AI Programming with Python 使用Python编程基础 2 Android Basics 安卓基础 3 ...
- kafka 事务代码实现(生产者到server端的事务)
kafka的事务指的是2个点 ① 生产者到kafka服务端的事务保障 ②消费者从kafka拉取数据的事务 kafka提供的事务机制是 第①点, 对于第②点来说 只能自己在消费端实现幂等性. ...
- omnet++:官方文档翻译总结(一)
1.什么是omnet++ 翻译总结自:What is OMNeT++? omnet++是用来进行网络仿真的C++库和框架.这里的网络包括有线.无线.on-chip.queueing网络等等.特定领域中 ...
- LeetCode-077-组合
组合 题目描述:给定两个整数 n 和 k,返回范围 [1, n] 中所有可能的 k 个数的组合. 你可以按 任何顺序 返回答案. 示例说明请见LeetCode官网. 来源:力扣(LeetCode) 链 ...
- think php 框架下拉分页
//以对象的形式获取数据库$data变量的信息,将lastPage()传输至页面 $lastpage = $data->lastPage(); $this->assign('lastpag ...
- ASP.NET Core框架探索之Authentication
今天我们来探索一下ASP.NET Core中关于权限认证,所谓权限认证,就是通过某些方式获取到用户的信息. 需要开启权限认证,我们首先需要在容器中注入认证服务,使用services.AddAuthen ...
- LGP6276题解
众所周知,排列是一个置换,一个置换是一车环. 步数就是这些环长的 \(lcm\). 如果你去思考直接 DP,会发现很困难,根本设不出来状态.于是考虑正难则反:每个质数幂 \(p^k\) 对答案的贡献. ...
- 基于python 实现KNN 算法
#!/usr/bin/env python # -*- coding: utf-8 -*- # @Time : 2018/11/7 14:50 # @Author : gylhaut # @Site ...