无人驾驶车辆路径跟踪的增量式PID控制
路径跟踪是无人车研究方向的一项关键技术。路径跟踪控制算法是指能够使无人车按照预设路径,安全稳定行驶的控制方法。
建立无人车路径跟踪模型
预设无人车在A、B两点间,当前位置为D点,航向为hF
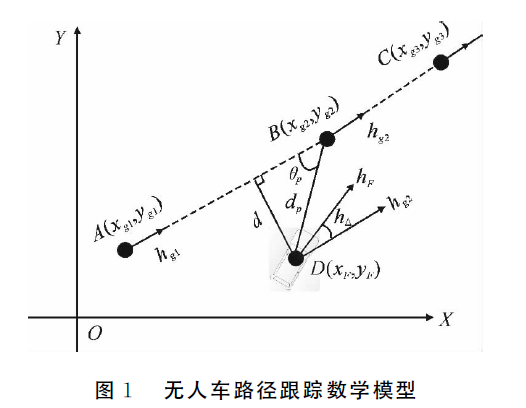
可以得到BD的距离dp ;D到AB的垂线段距离d;夹角θp的值;航向角差h△=hf-hg2;
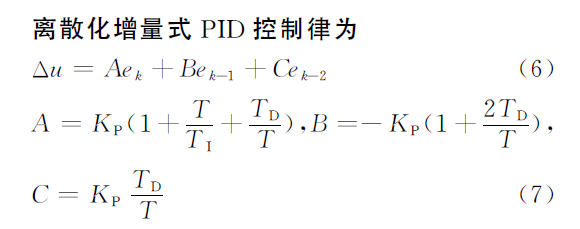
允许的误差范围为0.2m,在误差范围内和误差范围外的控制策略是不同的
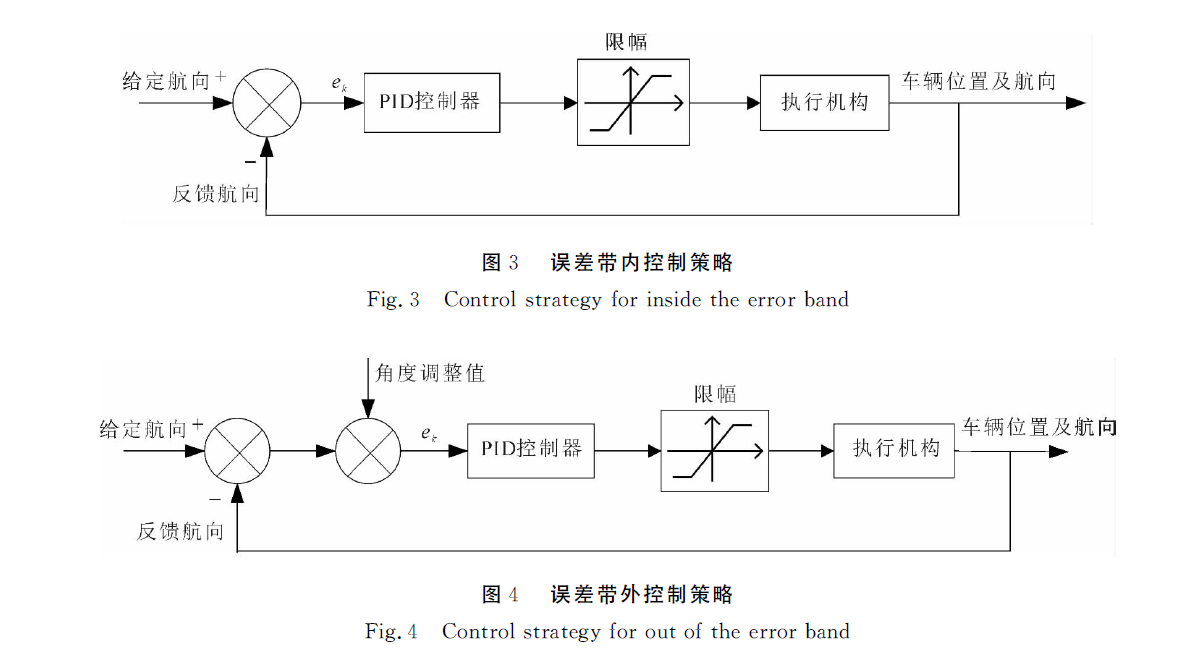
ek为航向给定量rk和反馈量ck的差值,控制器PID的输入量,δ为角度调整值
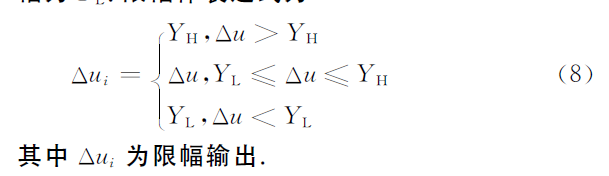
△u为控制器输出,Kp为比例系数,TI、TD分别为积分和微分时间,KI=1/TI;KD=TD;KI、KD分别为积分系数和微分系数
在PID算法中引入积分环节的主要目的是为了减小系统静差,提高系统的控制精度。
微分系数的引入主要是为了改善闭环系统的稳定性和动态响应速度,这是由于微分系统主要影响系统误差变化速率。
由于PID控制器输出是方向盘转角,车辆方向不会瞬时改变太大,因此对其采取限幅措施,得到限幅输出。即方向盘转角每次最多变化的角度。
控制算法的步骤:
1、计算ek的值:若车在误差带内,ek=rk-ck;若车在误差带外,ek=rk-ck-δ
2、确定积分系数:若ek的值大于ξ时,KI=0;若ek的值小于ξ时,KI等于设定值
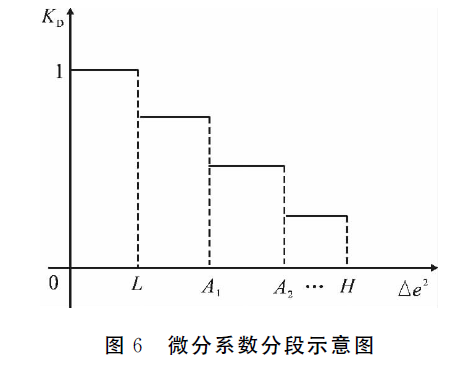
3、确定微分系数:定义误差变动量的平方值为Δe2=(ek -ek-1)2;KD的值由微分系数分段图得到
4、计算控制器输出△u,确定限幅输出
无人驾驶车辆路径跟踪的增量式PID控制的更多相关文章
- 增量式PID的matlab实现
首先,增量式PID的实现公式: 式中 Δe(k)=e(k)-e(k-1) 进一步可以改写成 式中 . . 为了便于理解,也可写成: 式中e(k)为第k次采样时的设定值与实际值的差,e(k-1 ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- C 语言实现增量式PID
一直以来,pid都是控制领域的经典算法,之前尝试理解了很久,但还是一知半解,总是不得要领,昨天模仿着别人的代码写了一个增量式pid的代码. 我的理解就是pid其实就是对你设置的预定参数进行跟踪.在控制 ...
- 增量式PID计算公式4个疑问与理解
一开始见到PID计算公式时总是疑问为什么是那样子?为了理解那几道公式,当时将其未简化前的公式“活生生”地算了一遍,现在想来,这样的演算过程固然有助于理解,但假如一开始就带着对疑问的答案已有一定看法后再 ...
- 增量式PID简单翻板角度控制
1.研究背景 随着电子技术.信息技术和自动控制理论技术的完善与发展,近来微型处理器在控制方面的应用也越来越多.随之逐渐渗透到我们生活的各个领域.如导弹导航装置,飞机上仪表的控制,网络通讯与数据传输,工 ...
- 增量式PID的stm32实现(转)
源:增量式PID的stm32实现,整定过程 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异. 资料上比较多的是: 还有一种是: ...
- 位置式PID与增量式PID
//位置式PID float Kp; float Ki; float Kd; float eSum,e0,e1; float pid_control(float now,float target) { ...
- 【转】位置式、增量式PID算法C语言实现
位置式.增量式PID算法C语言实现 芯片:STM32F107VC 编译器:KEIL4 作者:SY 日期:2017-9-21 15:29:19 概述 PID 算法是一种工控领域常见的控制算法,用于闭环反 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
随机推荐
- 关于Unsupported major.minor version 52.0报错问题解决方案
目录 1.问题描述2.问题分析3.解决方案步骤一:删除JDK1.7版本步骤二:导入JDK1.8版本步骤三:将新的JDK1.8引入到工程中4.总结1.问题描述在启动项目工程中,当编译class文件的时候 ...
- java获取json数组格式中的值
第一种方法: String str = "{'array':[{'id':5,'name':'张三'},{'id':6,'name':'李四'}]}"; JSONArray jso ...
- iconv_close - 关闭字符转换描述符
总览 (SYNOPSIS) #include <iconv.h> int iconv_close (iconv_t cd); 描述 (DESCRIPTION) iconv_close 函数 ...
- Matlab 快速多通道积分图计算函数
所谓快速多通道积分图计算,其实就是 cumsum2D. 我写了一个比较快的版本(比 VLFeat 的快),用 mex 编译一下就能用了. 代码 #include <string.h> #i ...
- 001-cut 的用法
[root@zabbix ~]# , /etc/passwd root: bin: daemon: adm: shutdown: halt: mail: operator: games: nobody ...
- dataTable 、dataView、Dataset 区别
dataTable .dataView.Dataset 区别的经典回答 1.DataView是DataTable的表示,DataTable表里的记录是没有顺序的,但显示可以有不同顺序(DataVIew ...
- php字符串大小写转换
strtoupper().strtolower().ucfirst().ucfirst().ucwords().mb_strtoupper().mb_strtolower()和mb_convert_c ...
- 批量修改zencart型号:品牌名称+型号格式
批量修改zencart型号:品牌名称+型号格式 将下面代码保存为zc_change_model.php,上传到网站根目录运行即可,操作前先备份数据库 <?php /*** 批量修改zencart ...
- win32创建工具栏的自定义图标
注意点:使用LoadImage函数加载bmp图片,这里特指BMP图片,其实LoadImage可以加载很多格式的图片 HBITMAP bitmap = (HBITMAP)LoadImage((HINST ...
- python3 + Tensorflow + Faster R-CNN训练自己的数据
之前实现过faster rcnn, 但是因为各种原因,有需要实现一次,而且发现许多博客都不全面.现在发现了一个比较全面的博客.自己根据这篇博客实现的也比较顺利.在此记录一下(照搬). 原博客:http ...