无人驾驶车辆路径跟踪的增量式PID控制
路径跟踪是无人车研究方向的一项关键技术。路径跟踪控制算法是指能够使无人车按照预设路径,安全稳定行驶的控制方法。
建立无人车路径跟踪模型
预设无人车在A、B两点间,当前位置为D点,航向为hF
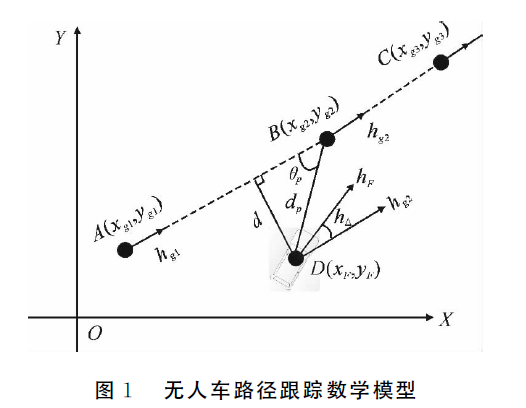
可以得到BD的距离dp ;D到AB的垂线段距离d;夹角θp的值;航向角差h△=hf-hg2;
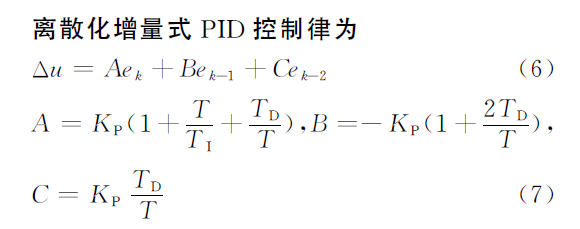
允许的误差范围为0.2m,在误差范围内和误差范围外的控制策略是不同的
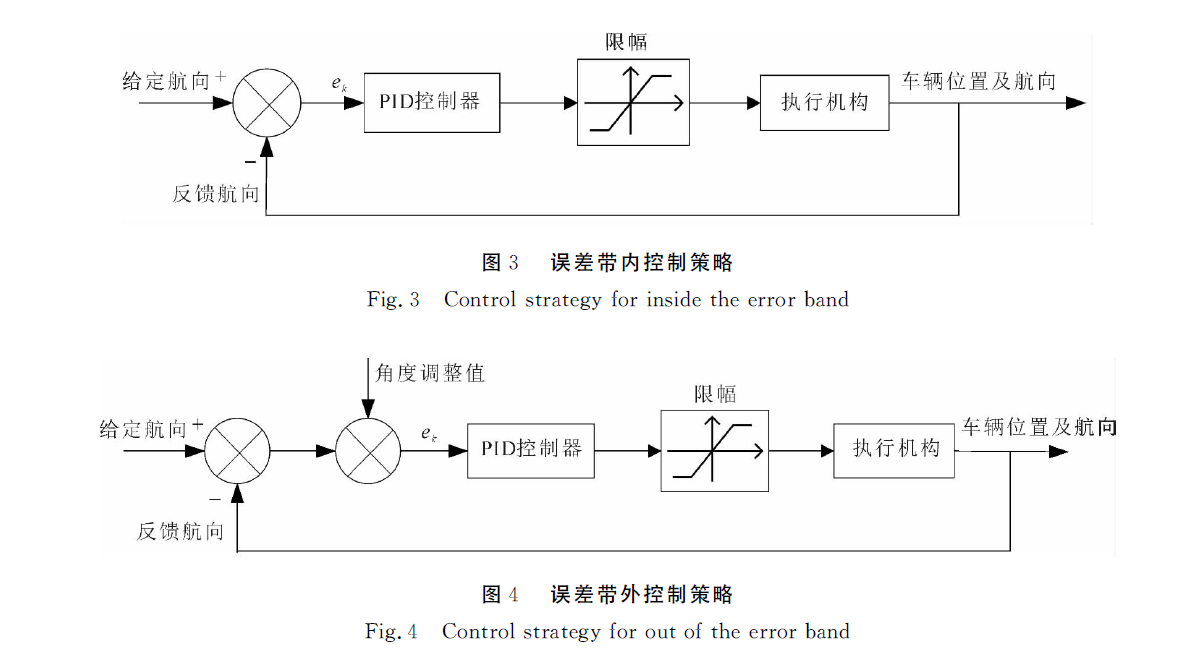
ek为航向给定量rk和反馈量ck的差值,控制器PID的输入量,δ为角度调整值
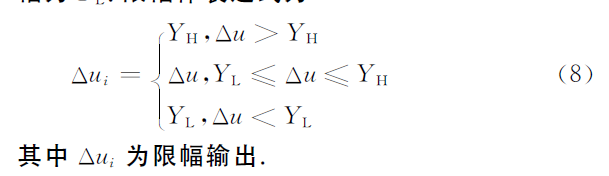
△u为控制器输出,Kp为比例系数,TI、TD分别为积分和微分时间,KI=1/TI;KD=TD;KI、KD分别为积分系数和微分系数
在PID算法中引入积分环节的主要目的是为了减小系统静差,提高系统的控制精度。
微分系数的引入主要是为了改善闭环系统的稳定性和动态响应速度,这是由于微分系统主要影响系统误差变化速率。
由于PID控制器输出是方向盘转角,车辆方向不会瞬时改变太大,因此对其采取限幅措施,得到限幅输出。即方向盘转角每次最多变化的角度。
控制算法的步骤:
1、计算ek的值:若车在误差带内,ek=rk-ck;若车在误差带外,ek=rk-ck-δ
2、确定积分系数:若ek的值大于ξ时,KI=0;若ek的值小于ξ时,KI等于设定值
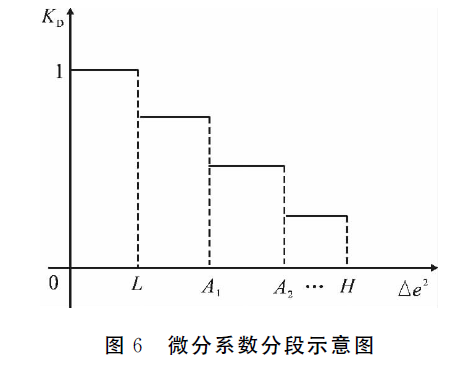
3、确定微分系数:定义误差变动量的平方值为Δe2=(ek -ek-1)2;KD的值由微分系数分段图得到
4、计算控制器输出△u,确定限幅输出
无人驾驶车辆路径跟踪的增量式PID控制的更多相关文章
- 增量式PID的matlab实现
首先,增量式PID的实现公式: 式中 Δe(k)=e(k)-e(k-1) 进一步可以改写成 式中 . . 为了便于理解,也可写成: 式中e(k)为第k次采样时的设定值与实际值的差,e(k-1 ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- C 语言实现增量式PID
一直以来,pid都是控制领域的经典算法,之前尝试理解了很久,但还是一知半解,总是不得要领,昨天模仿着别人的代码写了一个增量式pid的代码. 我的理解就是pid其实就是对你设置的预定参数进行跟踪.在控制 ...
- 增量式PID计算公式4个疑问与理解
一开始见到PID计算公式时总是疑问为什么是那样子?为了理解那几道公式,当时将其未简化前的公式“活生生”地算了一遍,现在想来,这样的演算过程固然有助于理解,但假如一开始就带着对疑问的答案已有一定看法后再 ...
- 增量式PID简单翻板角度控制
1.研究背景 随着电子技术.信息技术和自动控制理论技术的完善与发展,近来微型处理器在控制方面的应用也越来越多.随之逐渐渗透到我们生活的各个领域.如导弹导航装置,飞机上仪表的控制,网络通讯与数据传输,工 ...
- 增量式PID的stm32实现(转)
源:增量式PID的stm32实现,整定过程 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异. 资料上比较多的是: 还有一种是: ...
- 位置式PID与增量式PID
//位置式PID float Kp; float Ki; float Kd; float eSum,e0,e1; float pid_control(float now,float target) { ...
- 【转】位置式、增量式PID算法C语言实现
位置式.增量式PID算法C语言实现 芯片:STM32F107VC 编译器:KEIL4 作者:SY 日期:2017-9-21 15:29:19 概述 PID 算法是一种工控领域常见的控制算法,用于闭环反 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
随机推荐
- 手把手带你了解sass
sass的使用 减少重复的工作 1.变量的声明: 是以$开头给变量命名; $height-color: #F30 2.变量的使用范围: 变量可以在多个地方存在,不一定限制在代码块中.但是如果定义在了代 ...
- Git生成公钥.pub 及秘钥 命令
Git生成公钥.pub 及秘钥 命令 ssh-keygen -t rsa -C "******@qq.com" 将.pub公钥里面内容复制到github或者将这文件交给git管理员 ...
- docker search - 搜寻镜像
使用docker search 命令可以搜索docker hub官方仓库中的镜像. # docker search --help Usage: docker search [OPTIONS] TERM ...
- DSP学习资料:基于6U VPX的 XC7VX690T+C6678的双FMC接口雷达通信处理板
基于6U VPX的 XC7VX690T+C6678的双FMC接口雷达通信处理板 一.板卡概述 高性能VPX信号处理板基于标准6U VPX架构,提供两个标准FMC插槽,适用于电子对抗或雷达信号等领域 ...
- Instr()函数用法
返回 Variant (Long),指定一字符串在另一字符串中最先出现的位置. 语法 InStr([start, ]string1, string2[, compare]) InStr 函数的语法具有 ...
- Java并发编程实战 第5章 构建基础模块
同步容器类 Vector和HashTable和Collections.synchronizedXXX 都是使用监视器模式实现的. 暂且不考虑性能问题,使用同步容器类要注意: 只能保证单个操作的同步. ...
- Mybatis 动态sql(转载)
原文地址:http://www.cnblogs.com/dongying/p/4092662.html 传统的使用JDBC的方法,相信大家在组合复杂的的SQL语句的时候,需要去拼接,稍不注意哪怕少了个 ...
- [bzoj4358]permu:莫队+线段树/回滚莫队
这道题是几天前水过去的,现在快没印象了,水一发. 首先我们看到它让求解的是最长的值域 连续段长度,很好. 然后就想到了山海经,但但是我还没有做. 然后又想到了很久以前的一次考试的T3旅馆hotel(我 ...
- cssfloat布局以及其他小技巧
css float 布局以及其他小技巧总结 这篇博文 前面四个部分是关于css 经典布局 如果你已经知道了 可以直接跳过看第六部分 css 的其他小技巧 1.0 左右居中布局 <!DOCTYPE ...
- null 的应用
它是 Oracle 中非常特殊的一种类型.它表示不确定,表示没有值.并且它能转化成所有的类型. 向数据库中插入空字符串时,oracle 会把它自动转化为 null 类型.所以,在查询空字符的时候: s ...