一、来源
模型例子自己带来副图像
二、简化
#include <algorithm>
#include <fstream>
#include <iomanip>
#include <vector>
#include <string>
#include <chrono>
#include <memory>
#include <utility>
#include <format_reader_ptr.h>
#include <inference_engine.hpp>
#include <ext_list.hpp>
#include <samples/slog.hpp>
#include <samples/args_helper.hpp>
#include <samples/ocv_common.hpp>
#include <format_reader_ptr.h>
#include "segmentation_demo.h"
using namespace InferenceEngine;
using namespace std;
using namespace cv;
//-i E:/OpenVINO_modelZoo/road.png -m E:/OpenVINO_modelZoo/road-segmentation-adas-0001.xml
void main()
{
std::vector<std::string> images;
string imageNames = "E:/OpenVINO_modelZoo/road.png";
images.push_back(imageNames);
// --------------------------- 1.为IE准备插件-------------------------------------
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice::eCPU));
printPluginVersion(plugin, std::cout);//正确回显表示成功
plugin.AddExtension(std::make_shared<Extensions::Cpu::CpuExtensions>());//Extension,useful
// --------------------------- 2.读取IR模型(xml和bin)---------------------------------
CNNNetReader networkReader;
networkReader.ReadNetwork("E:/OpenVINO_modelZoo/road-segmentation-adas-0001.xml");
networkReader.ReadWeights("E:/OpenVINO_modelZoo/road-segmentation-adas-0001.bin");
CNNNetwork network = networkReader.getNetwork();
// --------------------------- 3. 准备输入输出的------------------------------------------
InputsDataMap inputInfo(network.getInputsInfo());//获得输入信息
BlobMap inputBlobs; //保持所有输入的blob数据
if (inputInfo.size() != 1) throw std::logic_error("错误,该模型应该为单输入");
auto inputInfoItem = *inputInfo.begin();//开始读入
std::vector<std::shared_ptr<unsigned char>> imagesData;
for (auto & i : images) {
FormatReader::ReaderPtr reader(i.c_str()); //使用FormatReader来读取图片数据,这里的images是一个vector,注意对于批量数据的读取
if (reader.get() == nullptr) {
slog::warn << "Image " + i + " 无法读取!" << slog::endl;
continue;
}
/** 获得图片数据 **/
std::shared_ptr<unsigned char> data(
reader->getData(inputInfoItem.second->getTensorDesc().getDims()[3],
inputInfoItem.second->getTensorDesc().getDims()[2]));
if (data.get() != nullptr) {
imagesData.push_back(data);
}
}
if (imagesData.empty()) throw std::logic_error("错误的格式,请检查!");
network.setBatchSize(imagesData.size());
slog::info << "Batch size is " << std::to_string(networkReader.getNetwork().getBatchSize()) << slog::endl;
inputInfoItem.second->setPrecision(Precision::U8);
//准备输出数据
OutputsDataMap outputInfo(network.getOutputsInfo());
std::string firstOutputName;
for (auto & item : outputInfo) {
if (firstOutputName.empty()) {
firstOutputName = item.first;
}
DataPtr outputData = item.second;
if (!outputData) {
throw std::logic_error("错误的格式,请检查!");
}
item.second->setPrecision(Precision::FP32);
}
// --------------------------- 4. 读取模型 ------------------------------------------(后面这些操作应该可以合并了)
ExecutableNetwork executableNetwork = plugin.LoadNetwork(network, {});
// --------------------------- 5. 创建推断 -------------------------------------------------
InferRequest infer_request = executableNetwork.CreateInferRequest();
// --------------------------- 6. 将数据塞入模型 -------------------------------------------------
for (const auto & item : inputInfo) {
/** 创建输入BLOB **/
Blob::Ptr input = infer_request.GetBlob(item.first);
/** 3 通道塞数据 **/
size_t num_channels = input->getTensorDesc().getDims()[1];
size_t image_size = input->getTensorDesc().getDims()[3] * input->getTensorDesc().getDims()[2];
auto data = input->buffer().as<PrecisionTrait<Precision::U8>::value_type*>();
for (size_t image_id = 0; image_id < imagesData.size(); ++image_id) {
for (size_t pid = 0; pid < image_size; pid++) {
for (size_t ch = 0; ch < num_channels; ++ch) {
data[image_id * image_size * num_channels + ch * image_size + pid] = imagesData.at(image_id).get()[pid*num_channels + ch];
}
}
}
}
// --------------------------- 7. 推断结果 -------------------------------------------------
for (size_t iter = 0; iter < images.size(); ++iter) {
infer_request.Infer();//多张图片多次推断
}
// --------------------------- 8. 处理结果-------------------------------------------------------
slog::info << "输出结果" << slog::endl;
const Blob::Ptr output_blob = infer_request.GetBlob(firstOutputName);
const auto output_data = output_blob->buffer().as<float*>();
size_t N = output_blob->getTensorDesc().getDims().at(0);
size_t C = output_blob->getTensorDesc().getDims().at(1);
size_t H = output_blob->getTensorDesc().getDims().at(2);
size_t W = output_blob->getTensorDesc().getDims().at(3);
size_t image_stride = W * H * C;
for (size_t image = 0; image < N; ++image) {
std::vector<std::vector<size_t>> outArrayClasses(H, std::vector<size_t>(W, 0));
std::vector<std::vector<float>> outArrayProb(H, std::vector<float>(W, 0.));
for (size_t w = 0; w < W; ++w) {
for (size_t h = 0; h < H; ++h) {
if (C == 1) {
outArrayClasses[h][w] = static_cast<size_t>(output_data[image_stride * image + W * h + w]);
}
else {
for (size_t ch = 0; ch < C; ++ch) {
auto data = output_data[image_stride * image + W * H * ch + W * h + w];
if (data > outArrayProb[h][w]) {
outArrayClasses[h][w] = ch;
outArrayProb[h][w] = data;
}
}
}
}
}
std::string fileName = "out_" + std::to_string(image) + ".bmp";
std::ofstream outFile(fileName, std::ofstream::binary);
if (!outFile.is_open()) {
throw std::logic_error("Can't open file : " + fileName);
}
writeOutputBmp(outArrayClasses, C, outFile); //输出的代码
slog::info << "File : " << fileName << " was created" << slog::endl;
}
// -----------------------------------------------------------------------------------------------------
}
在改写的过程中有几点注意
1、添加lib和对应的dll文件,主要就是用于文件读取的;
以及format_reader.dll 文件放到目录下面;
2、头文件修改正确
三、改写
这个代码里面使用的是format_reader,使用起来颇为不方便,修改为OpenCV负责输入输出。
#include <algorithm>
#include <fstream>
#include <iomanip>
#include <vector>
#include <string>
#include <chrono>
#include <memory>
#include <utility>
#include <format_reader_ptr.h>
#include <inference_engine.hpp>
#include <ext_list.hpp>
#include <samples/slog.hpp>
#include <samples/args_helper.hpp>
#include <samples/ocv_common.hpp>
#include <format_reader_ptr.h>
#include "segmentation_demo.h"
using namespace InferenceEngine;
using namespace std;
using namespace cv;
//-i E:/OpenVINO_modelZoo/road.png -m E:/OpenVINO_modelZoo/road-segmentation-adas-0001.xml
void main()
{
std::vector<std::string> images;
string imageNames = "E:/OpenVINO_modelZoo/road.png";
images.push_back(imageNames);
// --------------------------- 1.为IE准备插件-------------------------------------
InferencePlugin plugin(PluginDispatcher().getSuitablePlugin(TargetDevice::eCPU));
printPluginVersion(plugin, std::cout);//正确回显表示成功
plugin.AddExtension(std::make_shared<Extensions::Cpu::CpuExtensions>());//Extension,useful
// --------------------------- 2.读取IR模型(xml和bin)---------------------------------
CNNNetReader networkReader;
networkReader.ReadNetwork("E:/OpenVINO_modelZoo/road-segmentation-adas-0001.xml");
networkReader.ReadWeights("E:/OpenVINO_modelZoo/road-segmentation-adas-0001.bin");
CNNNetwork network = networkReader.getNetwork();
// --------------------------- 3. 准备输入输出的------------------------------------------
InputsDataMap inputInfo(network.getInputsInfo());//获得输入信息
BlobMap inputBlobs; //保持所有输入的blob数据
if (inputInfo.size() != 1) throw std::logic_error("错误,该模型应该为单输入");
//auto lrInputInfoItem = *inputInfo.begin();//开始读入
//int w = static_cast<int>(lrInputInfoItem.second->getTensorDesc().getDims()[3]); //这种写法也是可以的,它的first就是data
//int h = static_cast<int>(lrInputInfoItem.second->getTensorDesc().getDims()[2]);
auto lrInputInfoItem = inputInfo["data"]; //开始读入
int w = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[3]); //模型要求的输入大小
int h = static_cast<int>(lrInputInfoItem->getTensorDesc().getDims()[2]);
Mat src = imread(imageNames);
if (src.empty())
return;
network.setBatchSize(1);//只有1副图片,故BatchSize = 1
//准备输出数据
OutputsDataMap outputInfo(network.getOutputsInfo());//获得输出信息
std::string firstOutputName;
for (auto &item : outputInfo) {
if (firstOutputName.empty()) {
firstOutputName = item.first;
}
DataPtr outputData = item.second;
if (!outputData) {
throw std::logic_error("错误的格式,请检查!");
}
item.second->setPrecision(Precision::FP32);
}
// --------------------------- 4. 读取模型 ------------------------------------------(后面这些操作应该可以合并了)
ExecutableNetwork executableNetwork = plugin.LoadNetwork(network, {});
// --------------------------- 5. 创建推断 -------------------------------------------------
InferRequest infer_request = executableNetwork.CreateInferRequest();
// --------------------------- 6. 将数据塞入模型 -------------------------------------------------
Blob::Ptr lrInputBlob = infer_request.GetBlob("data"); //data这个名字是我看出来的,实际上这里可以更统一一些
matU8ToBlob<float_t>(src, lrInputBlob, 0);//重要的转换函数,第3个参数是batchSize,应该是自己+1的
// --------------------------- 7. 推断结果 -------------------------------------------------
infer_request.Infer();//多张图片多次推断
// --------------------------- 8. 处理结果-------------------------------------------------------
const Blob::Ptr outputBlob = infer_request.GetBlob(firstOutputName);
const auto outputData = outputBlob->buffer().as<PrecisionTrait<Precision::FP32>::value_type*>();
size_t numOfImages = outputBlob->getTensorDesc().getDims()[0];
size_t numOfChannels = outputBlob->getTensorDesc().getDims()[1];
h = outputBlob->getTensorDesc().getDims()[2];
w = outputBlob->getTensorDesc().getDims()[3];
size_t nunOfPixels = w * h; //写在内存里的结果,还是要拼出来的
std::vector<cv::Mat> imgPlanes{ cv::Mat(h, w, CV_32FC1, &(outputData[0])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels])),
cv::Mat(h, w, CV_32FC1, &(outputData[nunOfPixels * 2])) };
for (auto & img : imgPlanes) //本来是平的
img.convertTo(img, CV_8UC1, 255);
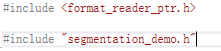
cv::Mat resultImg;
cv::merge(imgPlanes, resultImg);
cv::imshow("result", resultImg);
cv::waitKey();
}
这里需要注意的一点是在读取图片的大小的时候,我这里使用了
Blob::Ptr lrInputBlob = infer_request.GetBlob("data"); //data这个名字是我看出来的,实际上这里可以更统一一些
其前提是我知道这里叫做 data,这里可以改成更统一的方式。
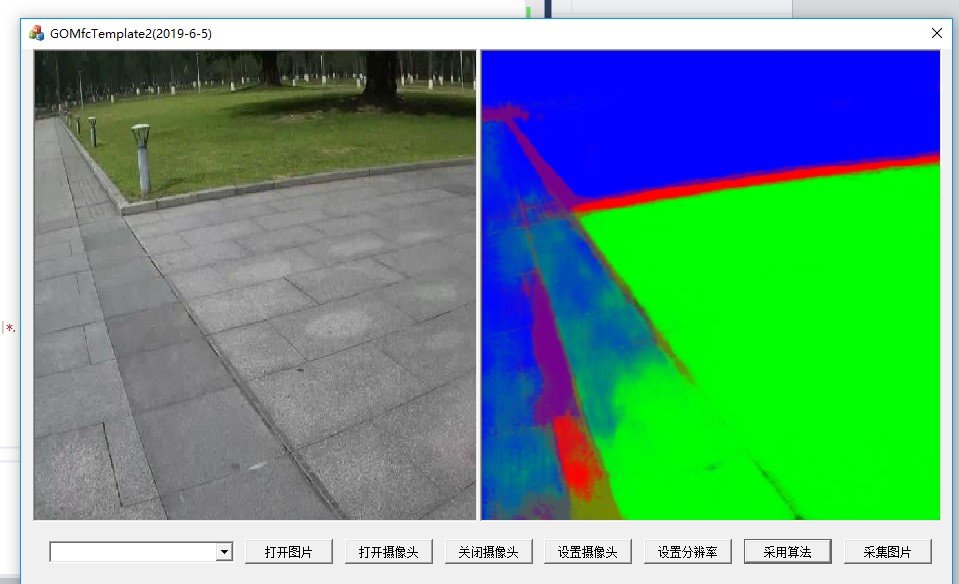
从结果来看,我认为OpenCV转换后的结果更好。当然差别只是在着色而已。
四、数据集测试
使用UAS Dataset进行测试,主要是想看一看批量数据的处理。使用Sample中的程序进行处理:
这个操作应该就是多张图片。
这个输入输出的界面就LOW了,我认为没有必要在函数中进行这个处理,函数处理单张就可以。原模型也是不支持视频的。
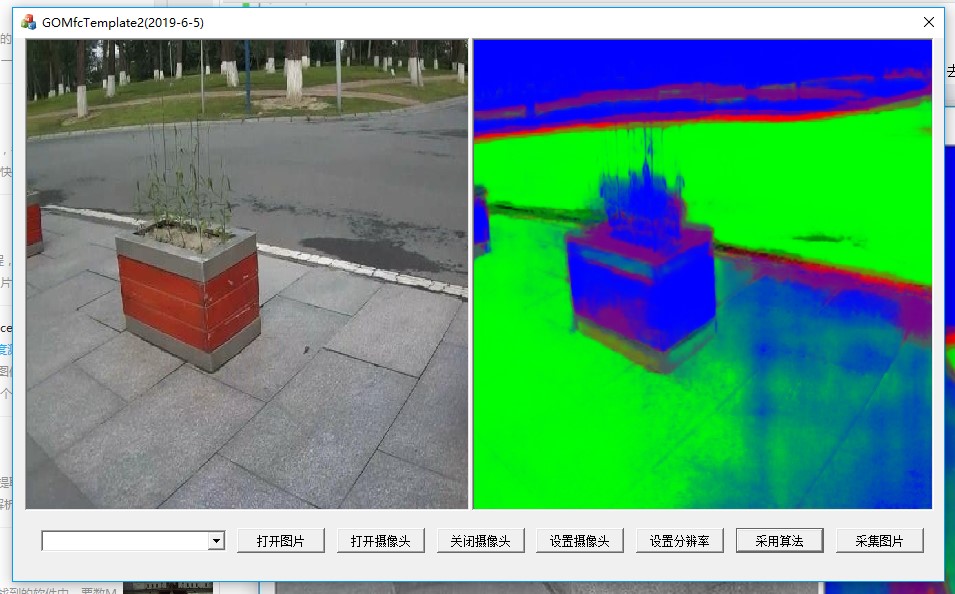
该造后的效果就很好
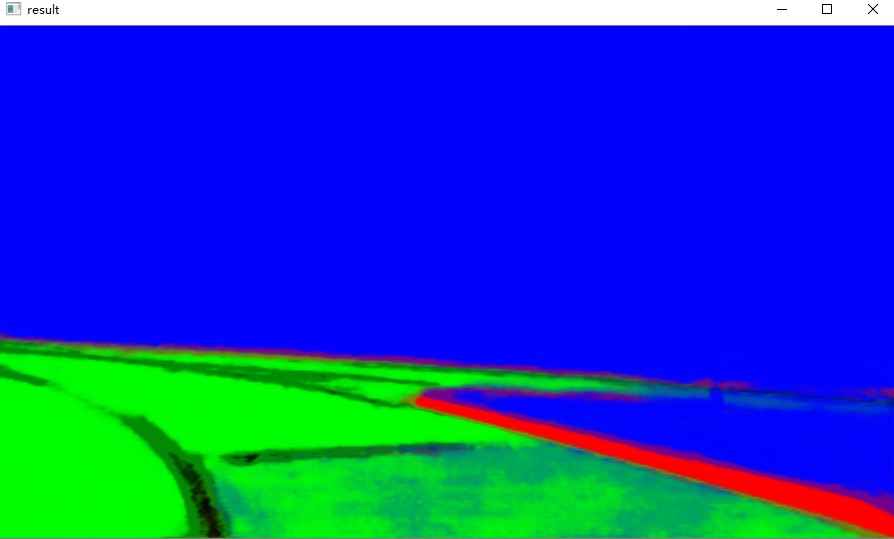
五、融合
在GOMFCTemplate中运行
其中,容易犯错的地方(release版本和debug版本的 cpu_extension重名,所以不能放到system目录下面):
以及OCV_COMMON可能引起混乱
第一步是直接替换
目前存在的一个突出问题,就是模型的创建和模型的infer独立的问题。这个东西在OpenVINO中可能有,但要去寻找,不是直接告诉你的东西。
做到这一步,虽然代码已经可以运行,但是突出的问题就是没有模块化,整个运算步骤都在循环中,这样效率肯定是很低下的。并且在资源的销毁处还存在问题。
可以进一步将其封装为函数:
比如类似这里面的

就是下一步需要参考的。
- 编程添加"作为服务登录”权利(包括例子和API)
搜索"log on as a service programmatically" https://msdn.microsoft.com/en-us/library/windows/ ...
- 限制访问次数例子和Ajax的some
-- 限制访问次数作业解答 -- -- urls.py 里-- from django.conf.urls import url from django.contrib import admin fr ...
- lambda表达式的应用例子和JavaSE 8特性
在JavaSE 8 引入了lambda表达式,lambda表达式的引入带来的好处是:通过语法上的改进,减少开发人员需要编写和维护的代码数量.这个在下面使用和不使用lambda的对比中可以清晰看出来. ...
- vuex的简单例子和vue model组件
好久没用过vuex了,vuex官方示例的计算器counter是用的webpack打包了单文件组件,不方便回顾,今天把代码改成了html引人的方式,方便回顾 <!DOCTYPE html> ...
- threading包的例子和queue包的例子
参考:https://www.cnblogs.com/tkqasn/p/5700281.html 参考:https://www.cnblogs.com/tkqasn/p/5700281.html th ...
- python 正则的使用例子和goupby
111122333类似这字符串的分类 Solution 1 ... using a regular expression def countAndSay(self, n): s = ' for _ i ...
- python 03—字符串分割
字符串分割 例:sentenc = "I am an Englist sentenc" sentence.split() split()把字符串按照空格进行分割,所以得到的结果是 ...
- 语义分割之RefineNet
背景介绍 近来年,深度卷积网络在目标检测方面取得了一定的成绩.但对于密集预测,仍存在一定不足,原因是频繁的卷积和池化导致最终的特征分辨率降低. 针对这个问题,目前主要采用两种方法:第一种:空洞卷积,如 ...
- CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)
CVPR目标检测与实例分割算法解析:FCOS(2019),Mask R-CNN(2019),PolarMask(2020)1. 目标检测:FCOS(CVPR 2019)目标检测算法FCOS(FCOS: ...
随机推荐
- 【OGG】OGG的下载和安装篇
[OGG]OGG的下载和安装篇 一.1 BLOG文档结构图 一.2 前言部分 一.2.1 导读 各位技术爱好者,看完本文后,你可以掌握如下的技能,也可以学到一些其它你所不知道的知识,~O(∩_∩ ...
- 03-JavaScript语法介绍
本篇主要关于原生JavaScript的介绍,其中包括其嵌入HTML页面方式,JavaScript的语法结构,以及贪吃蛇案例: 一.绪论 JavaScript是运行在浏览器端的脚步语言,JavaScri ...
- 关于header file、static、inline、variable hides的一点感想
前言 先看一段代码 #ifndef _INLINE_H #define _INLINE_H template<typename T> static inline T my_max(T a, ...
- 服务器部署docker lnmp环境
一.安装dockerDocker要求运行在Centos 7上,要求系统为64位,系统内核版本3.10以上 1.uname -an 查看当前系统版本 2.yum -y install docker 下载 ...
- Python面向对象三要素-多态
Python面向对象3要素-多态 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.多态概述 OCP原则:多用“继承”,少修改. 继承的用途:在子类上实现对基类的增强,实现多态. ...
- Tarjan算法分解强连通分量(附详细参考文章)
Tarjan算法分解强连通分量 算法思路: 算法通过dfs遍历整个连通分量,并在遍历过程中给每个点打上两个记号:一个是时间戳,即首次访问到节点i的时刻,另一个是节点u的某一个祖先被访问的最早时刻. 时 ...
- 基于appium快速实现H5自动化测试
一.下载Appium-Server及库文件 库文件:jar包:java-client-3.1.0.jar Appium-Server:Appium服务器: 注:Appium包含客户端和服务端,客户端就 ...
- nginx设置反向代理,获取真实客户端ip
upstream这个模块提供一个简单方法来实现在轮询和客户端IP之间的后端服务器负荷平衡. upstream abc.com { server 127.0.0.1:8080; server 127.0 ...
- Apache Shiro<=1.2.4反序列化RCE漏洞
介绍:Apache Shiro是一个强大且易用的Java安全框架,执行身份验证.授权.密码和会话管理. 漏洞原因:因为shiro对cookie里的rememberme字段进行了反序列化,所以如果知道了 ...
- RedisTemplate在项目中的应用
如下主要通去年无聊做的 "涂涂影院后台管理系统" 一个 demo,看 RedisTemplate 的使用. 体验地址:http://video.71xun.com:8080 账户 ...