RTOS入门
RTOS是什么?
RTOS是一款操作系统,相当于Windows\Linux
分为ucos FreeRTOS RT-Thread LiteOS
比裸机开发的优势在于,多任务系统,不必串行
临界区
- 临界区就是一段执行时不可被打断的代码
- 操作全局变量不可被打断
- 临界区的不可被打断机制,导致他不能运行太久,否则会阻塞程序
目录结构
源码放在FreeRTOS/Source文件夹下
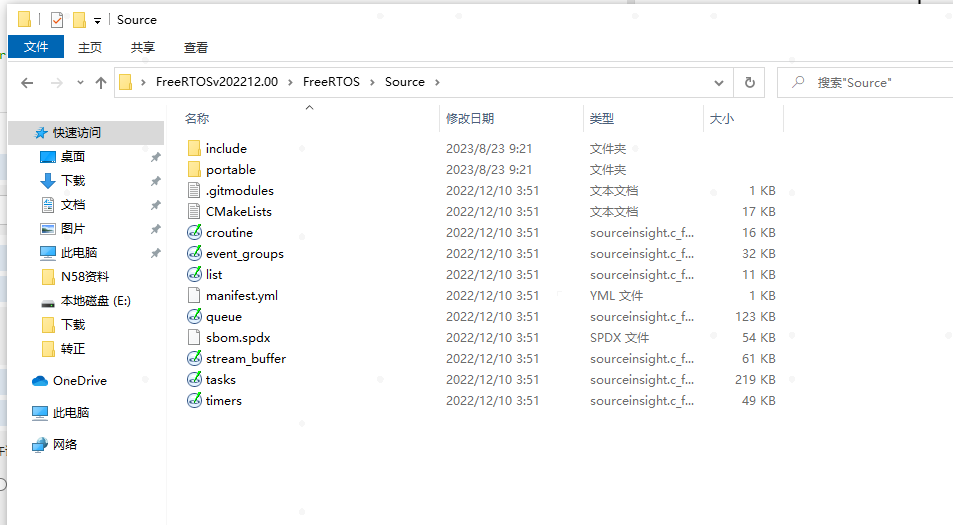
- portable是需要特殊处理适配的
- include是包含的头文件
代码规范
数据结构
对常见的c语言数据结构重定义
1. #define portCHAR char
2. #define portFLOAT float
3. #define portDOUBLE double
4. #define portLONG long
5. #define portSHORT short
6. #define portSTACK_TYPE uint32_t
7. #define portBASE_TYPE long
1. typedef int int32_t;
2. typedef short int16_t;
3. typedef char int8_t;
4. typedef unsigned int uint32_t;
5. typedef unsigned short uint16_t;
6. typedef unsigned char uint8_t;
事实上,上述都是定义在stdint.h中的,因不同的系统Linux\Window\MacOS\RTOS有所不同,作用就是确保不同平台上都精确的占对应的位,占对应的字节(8位一字节)
变量定义
char 型变量的前缀是 c
short 型变量的前缀是 s
long 型变量的前缀是 l
复杂的结构体,句柄等定义的变量名的前缀是 x
变量是无符号型的再加前缀 u,是指针变量则加前缀 p
函数取名
私有函数前加prv
返回值void,前缀v
#define taskYIELD() 表示宏定义在task.h下
任务
概念
单片机写在一个while(1)里,RTOS是内核调度执行。
每一个内核都是一个处理单元,一个内核同时只能处理一个任务
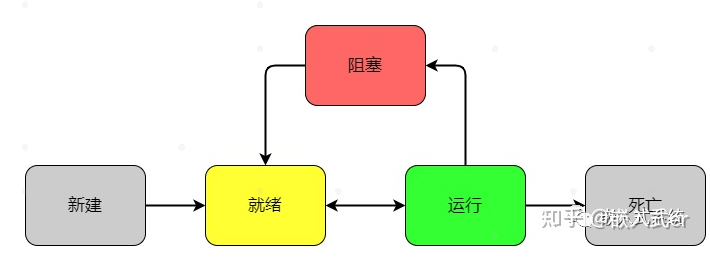
- 还有一个挂起状态,挂起状态下调度器不可见,如果一个任务较长时间不运行就把他挂起,否则阻塞的话还加个超时判断
创建任务
ret = xTaskCreate((TaskFunction_t) master_task_main, /* 任务入口函数 */(1)
“MASTER”, /* 任务名字 */(2)
64*1024, /* 任务栈大小 */(3)
NULL, ,/* 任务入口函数参数 */(4)
TASK_PRIORITY_NORMAL, /* 任务的优先级 */(5)
&task_master_handler); /* 任务句柄指针 */(6)
任务入口函数,是个函数指针,指向要执行的任务。
任务描述名称,字符串形式,最大长度由 FreeRTOSConfig.h 中定义的 configMAX_TASK_NAME_LEN 宏指定,多余部分会被自动截掉,只是方便调试。
任务堆栈大小,单位为字, 4 个字节 uint32_t,这个要注意,否则系统内存紧缺。
任务入口函数形参,不用的时候配置为 0 或者NULL 即可。
任务的优先级,数值越大优先级越高,0 代表最低优先级。基于其SDK开发,可将自定义的所有业务功能task设为同一个优先级,按时间片轮询调度。
任务句柄指针,作用是可以恢复、挂起、删除等等,目前还不知道怎么实现的,也可以直接NULL。
迷糊的一点
void func(){};
void (*p) () = func;
后面可以用p代替func,func代替不了p
- 但不可以直接void (* p)(){}写函数体,因为这样函数就没名字了
任务调度的时候第一个参数可以填p或&func
任务调度
创建成功后就进入了就绪状态,等待被调度
操作系统的任务调度器只启动一次,且启动了就不返回了,自此之后都由它调度
vTaskStartScheduler()
执行后自动创建空任务和定时器任务。
高优先级的任务可打断低优先级任务,低优先级任务必须在高优先级任务阻塞或结束后才能得到调度
相同优先级的任务采用时间片轮转方式进行调度
三个用于任务启动和切换的异常SVC、PendSV 和SysTick,分别用于任务启动、切换、获取时间片
启动方式
都要现在main中初始好硬件和RTOS系统
所有任务创建完成,启动调度
创建一个任务,启动调度器,然后在这个任务里创建其他任务,所有任务都创建完成,第一个任务把自己删掉
为什么要空闲(idle)任务?因为一旦启动就不能停,设置一个优先级最低的空闲任务
状态切换
vTaskSuspend(任务函数指针)挂起一个任务
vTaskSuspendAll()挂起所有任务
vTaskResume(任务函数指针)取消挂起
xTaskResumeFromISR(任务函数指针)用于中断,不管被嵌套挂起几次都能解除
vTaskDelete(任务函数指针)用于一个任务删除另一个任务。如果是自己删除自身就不用填形参
一般中断服务函数只做标记事件,然后通知其他任务完成其他的事情防止阻塞。
队列
概念
队列是用于任务间通信的特定数据结构
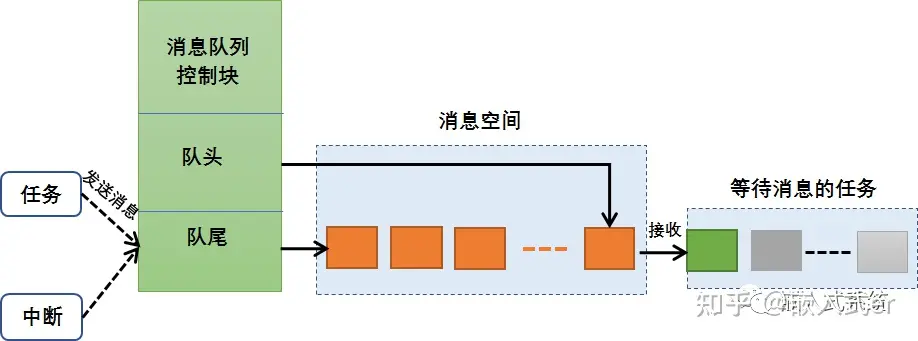
注意:消息空间已满仍在发或者消息空间NULL仍在读,都需要当前任务阻塞等待。
创建
xQueueGenericCreate()申请内存,传入队列占用单元、每个单元字节、队列类型
xQueueGenericReset()初始化,传入队列句柄
发消息
xQueueSend()消息拷贝入队,如果是中断里需要用xQueueSendfromISR()参数依次为:队列句柄、消息、队列满时阻塞超时时间
xQueueSendToFrant()队首插入xQueueGenericSend()多个参数,第四个参数表示位置如果不确定是不是fromISR,就只管发送,让内部判断是系统服务还是中断服务
收消息
xQueueReceive()接收消息并从消息空间删除,记得写阻塞超时的参数
查询
uxQueueMessagesWaiting(句柄)查询队列消息数量
uxQueueSpacesAvailable()查询队列空闲数量
定时器
分类
分为软件定时器、硬件定时器,硬件触发中断且精度高,软件是操作系统封装的接口,基于硬件
通常软件定时器以系统节拍周期为计时单位。系统节拍配置为configTICK_RATE_HZ,该宏在 FreeRTOSConfig.h 中,一般是100或者1000
系统节拍越小开销越大,但也越精确
创建
TimerHandle_t xTimerCreate( const char * const pcTimerName, //定时器名称
const TickType_t xTimerPeriodInTicks, //定时时间
const UBaseType_t uxAutoReload, //是否自动重载
void * const pvTimerID, //回调函数的参数
TimerCallbackFunction_t pxCallbackFunction ) //回调函数
- 创建成功后处于休眠状态。
xTimerStart()、
xTimerReset()、
xTimerStartFromISR() 、xTimerResetFromISR()
xTimerChangePeriod()、xTimerChangePeriodFromISR()
xTimerStop(),xTimerStopfromISR()
xTimerDelete() - 队列和任务都是按需创建一直使用,一般不用删除,但是定时器用完一定要删,而且置句柄NULL
信号量
信号量(Semaphore)是一种实现任务间通信的机制 可以简单认为是为支持多任务同时操作的全局变量
二值信号量
- 二值信号量看作只有一个消息的队列,因此这个队列只能为空或满
计数信号量
- 计数信号量则可以被认为长度大于 1 的队列,信号量使用者依然不必关心存储在队列中的消息,只需关心队列是否有消息即可
互斥信号量
优先级翻转问题:假设有任务H,任务M和任务L三个任务,优先级逐次降低。低优先级的任务L抢先占有资源,导致高优先级的任务H阻塞等待,此时再有中等优先级的任务M,它不需要该资源,且优先级高于任务L,它优先执行;之后再执行任务L,最后才执行任务H。看起来就是高优先级的任务反而不如低优先级的任务,即优先级翻转。
任务L先占用资源,任务H申请不到资源会进入阻塞态,同时系统就会把当前正在使用资源的任务L的优先级临时提高到与任务H优先级相同,即使任务M被唤醒了,因为它的优先级比任务H低,所以无法打断任务L,因为任务L的优先级被临时提升到 H;任务L使用完该资源,任务H优先级最高,将接着抢占 CPU 的使用权,这样保证任务H在任务M前优先执行。
事件
计数信号量处理多任务、多中断、多任务与中断同步比较麻烦,引入事件
- 事件是一种实现任务间通信的机制,可以一对多,多对多,一个任务等待多个事件的触发就叫一对多
RTOS入门的更多相关文章
- 29-ESP8266 SDK开发基础入门篇--编写TCP 客户端程序(Lwip RAW模式,非RTOS版,精简入门)
https://www.cnblogs.com/yangfengwu/p/11456667.html 由于上一节的源码长时间以后会自动断开,所以再做这一版非RTOS版的,咱直接用lua源码里面别人写的 ...
- 16-ESP8266 SDK开发基础入门篇--TCP 服务器 非RTOS运行版,串口透传(串口回调函数处理版)
https://www.cnblogs.com/yangfengwu/p/11105466.html 其实官方给的RTOS的版本就是在原先非RTOS版本上增加的 https://www.cnblogs ...
- 【RTOS】RTOS汇编入门 (1)
引言 为了提高效率,进行更为底层的操作,RTOS常采用汇编语句,因此了解常用的汇编语句,很有必要 汇编指令 1..equ:类似于c中的#define,表声明常量 例如:.equ PSW 0x10000 ...
- 28-ESP8266 SDK开发基础入门篇--编写wifi模块TCP 客户端程序(官方API版,非RTOS版)
https://www.cnblogs.com/yangfengwu/p/11432795.html 注:这节实现的功能是WIFI模块作为TCP 客户端,连接咱的TCP服务器,然后实现透传 本来想着做 ...
- 18-ESP8266 SDK开发基础入门篇--TCP 服务器 RTOS版,串口透传,TCP客户端控制LED
https://www.cnblogs.com/yangfengwu/p/11112015.html 先规定一下协议 aa 55 02 01 F1 4C 控制LED点亮 F1 4C为CRC高位和低位 ...
- 17-ESP8266 SDK开发基础入门篇--TCP服务器 RTOS版,小试牛刀
https://www.cnblogs.com/yangfengwu/p/11105466.html 现在开始写... lwip即可以用socket 的API 也可以用 netconn 的API实 ...
- 2-ESP8266 SDK开发基础入门篇--非RTOS版与RTOS版
https://www.cnblogs.com/yangfengwu/p/11071580.html 所有的源码 https://gitee.com/yang456/Learn8266SDKDevel ...
- 《Cortex-M0权威指南》之Cortex-M0编程入门
转载请注明来源:cuixiaolei的技术博客 嵌入式系统编程入门 微控制器是如何启动的 为了保存编译号的二进制程序代码,大多数的现代微控制器都会包含片上flash存储器.有些微控制器还可能有一个独立 ...
- 如何迅速入门STM32
我想说,为了学习单片机而去学习单片机的思路不对. 你问,如何系统地入门学习stm32? 本身就是一个错误的问题.假如你会使用8051 , 会写C语言,那么STM32本身并不需要刻意的学习. 你要考虑的 ...
- <2013 12 01> 一篇很好的关于windows编程的入门指导(2013年末写的,比较前沿)
我之前做了不少嵌入式开发,从单片机到ARM到RTOS到Linux等等,可以说走的是电气工程师的路线,对编程也是实用性的,跟计算机学院的科班套路不同.最近同学做一个windowsCE的项目请我帮忙,之前 ...
随机推荐
- c# 如何在一般处理程序中返回json
前言 迁移以前的笔记. 正文 无论是一般处理程序,还是其他程序,处理事项,肯定在于HttpResponse. 这种情况就可以操作,至于字符是自己转换还是由HttpResponse中的信息默认转换,都没 ...
- 第一次blog
前言:我在大一上学期学习了c语言,然后在下学期学习了第二门语言java,因为之前c语言学的挺一般的,然后在这学期学习java感觉还是挺不简单的,要自学很多东西,在这段时间里,我学习了JAVA的基本语法 ...
- vue+mockjs模拟用户登录接口(高仿书旗)
项目demo:http://39.103.131.74:8888/shuqi
- 力扣419(java)-甲板上的战舰(中等)
题目: 给你一个大小为 m x n 的矩阵 board 表示甲板,其中,每个单元格可以是一艘战舰 'X' 或者是一个空位 '.' ,返回在甲板 board 上放置的 战舰 的数量. 战舰 只能水平或者 ...
- 牛客网-SQL专项训练3
①这里有一张user表包含如下信息: 现在要把name列的所有值都转换为大写,并将字段重命名为names,像下面这样: SQL语句为:SELECT UCASE(name) AS names FROM ...
- OpenSergo & CloudWeGo 共同保障微服务运行时流量稳定性
简介: 流控降级与容错是微服务流量治理中的重要的一环,同时 MSE 还提供更广范围.更多场景的微服务治理能力,包括全链路灰度.无损上下线.微服务数据库治理.日志治理等一系列的微服务治理能力. 作者:宿 ...
- 【阿里云采购季】3月采购完,IT运维躺赢一年
阿里云2020上云采购季正式上线啦!今年的采购季可以逛些啥? 采购季正式期时间: 3月2日-3月31日 在这段时间里,想买啥就买吧,别忘了把想买的产品加入购物车噢,特惠产品叠加购物车满减,更划算噢! ...
- 那些你不知道的TCP冷门知识!
简介: 最近在做数据库相关的事情,碰到了很多TCP相关的问题,新的场景新的挑战,有很多之前并没有掌握透彻的点,大大开了一把眼界,选了几个案例分享一下. 最近在做数据库相关的事情,碰到了很多TCP相关的 ...
- CNCF TOC 委员张磊:不断演进的云原生给我们带来了什么?
简介: 任何一种云原生技术,它不再是某种能力的弥补,而是更多地将云的能力以某种方式更简单.更高效地透出给我的应用去使用.无论是容器.K8s 还是 Service Mesh,他们都是在不同的环节帮助应用 ...
- dotnet 使用 ConfigureAwait.Fody 库设置默认的 await 同步上下文切换配置
在 dotnet 里面,使用 await 进行异步逻辑,默认是会尝试切换回调用 await 的线程同步上下文.这个机制对于大多数的上层应用来说都是符合逻辑且方便的逻辑,例如对于带 UI 线程的 WPF ...