基于Gazebo搭建移动机器人,并结合SLAM系统完成定位和建图仿真
gazebo小车模型创建及仿真详见之前博客
参考链接
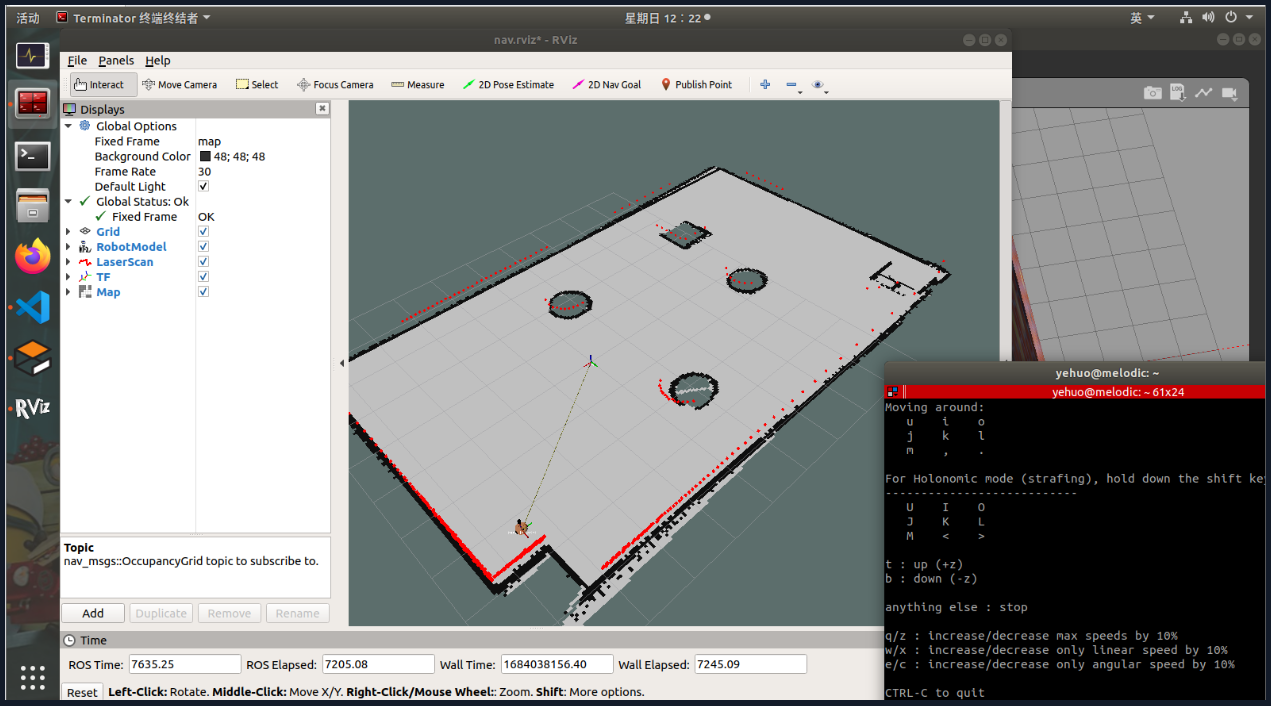
成果图
step1: 准备工作
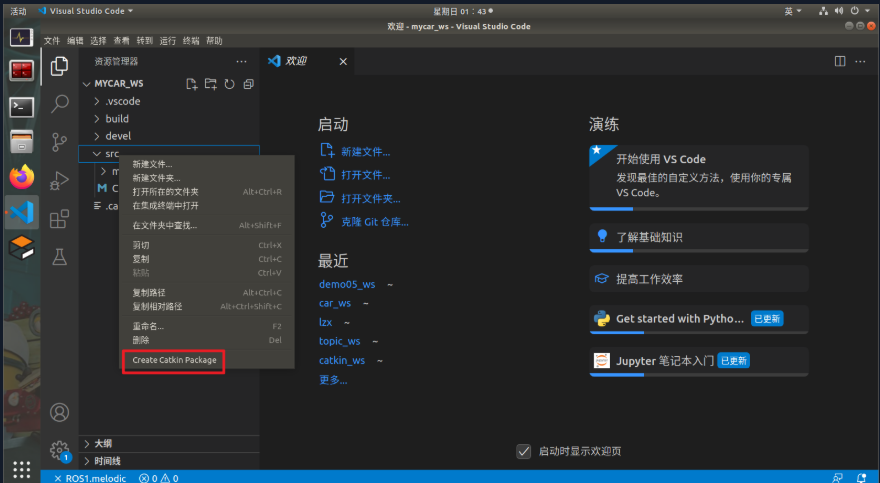
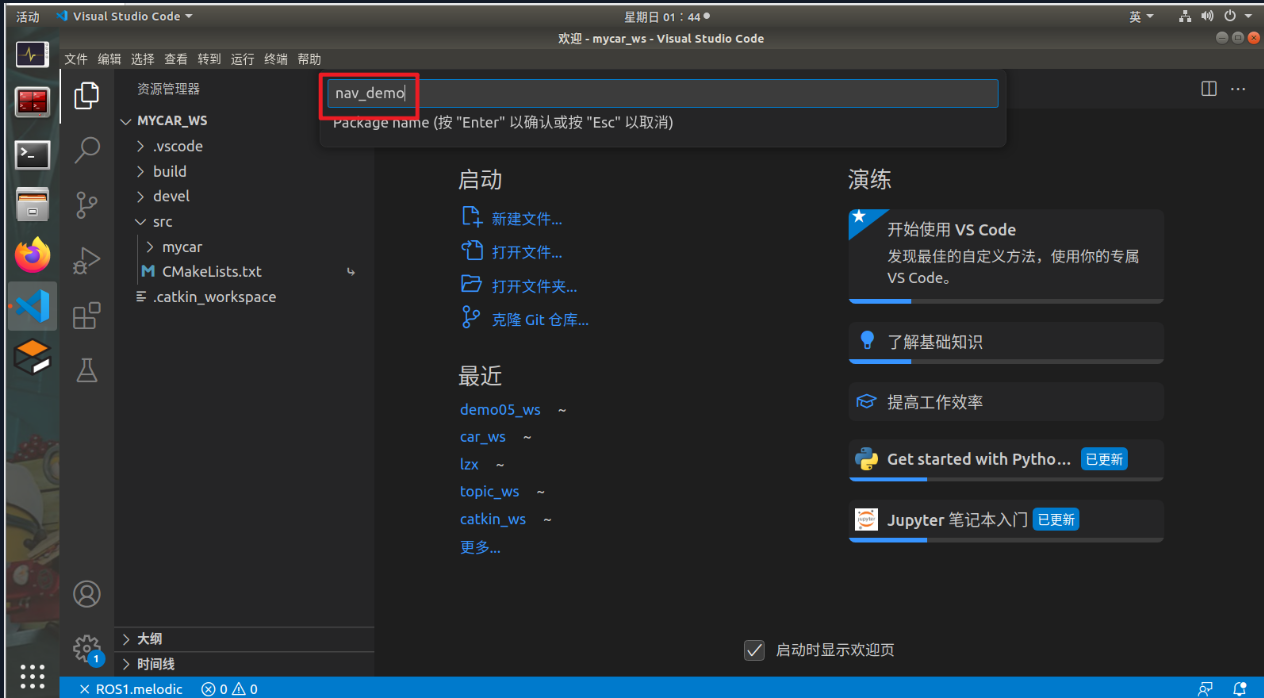
安装必要工具包+创建工作包
- 安装 gmapping 包(用于构建地图):
sudo apt install ros-melodic-gmapping- 安装地图服务包(用于保存与读取地图):
sudo apt install ros-melodic-map-server- 安装 navigation 包(用于定位以及路径规划):
sudo apt install ros-melodic-navigation
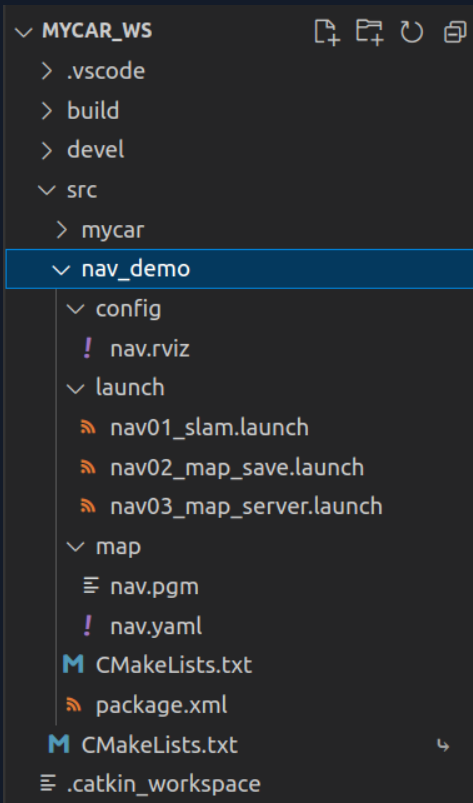
创建文件夹及文件
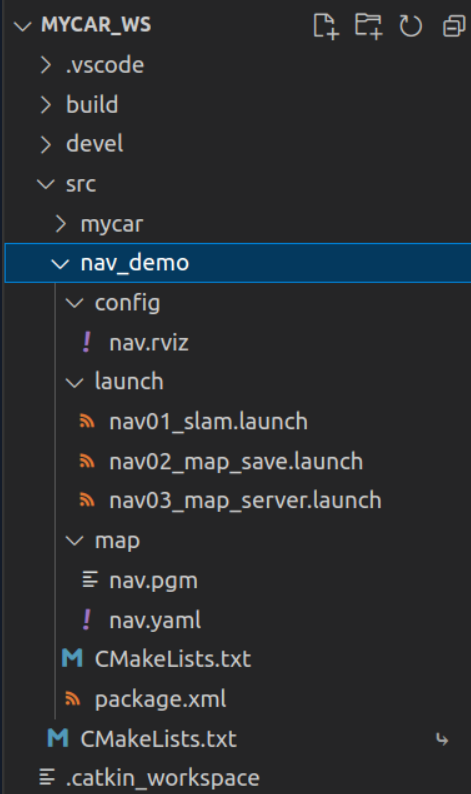
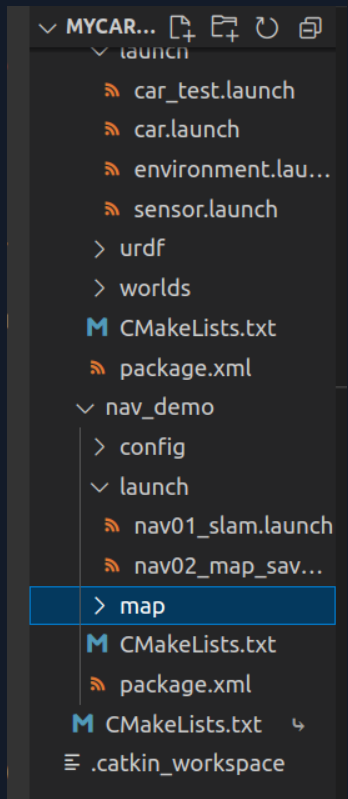
按下图结构在 nav_demo 下依次创建
文件夹: config(也可按照步骤之后创建)、map(也可按照步骤之后创建)、launch
文件:nav01_slam.launch、nav02_map_save.launch、nav03_map_server.launch
/home/yehuo/mycar_ws/src/nav_demo/launch/nav01_slam.launch
<launch>
<!-- 仿真环境下,将该参数设置为true -->
<param name="use_sim_time" value="true"/>
<!-- gmapping -->
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<!-- 设置雷达话题 -->
<remap from="scan" to="scan"/>
<!-- 关键参数:坐标系 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
<param name="map_update_interval" value="5.0"/>
<param name="maxUrange" value="16.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="lskip" value="0"/>
<param name="srr" value="0.1"/>
<param name="srt" value="0.2"/>
<param name="str" value="0.1"/>
<param name="stt" value="0.2"/>
<param name="linearUpdate" value="1.0"/>
<param name="angularUpdate" value="0.5"/>
<param name="temporalUpdate" value="3.0"/>
<param name="resampleThreshold" value="0.5"/>
<param name="particles" value="30"/>
<param name="xmin" value="-50.0"/>
<param name="ymin" value="-50.0"/>
<param name="xmax" value="50.0"/>
<param name="ymax" value="50.0"/>
<param name="delta" value="0.05"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
</node>
<node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" />
<node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" />
<node pkg="rviz" type="rviz" name="rviz" />
<!-- 可以保存 rviz 配置并后期直接使用-->
<!--
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find my_nav_sum)/rviz/gmapping.rviz"/>
-->
</launch>
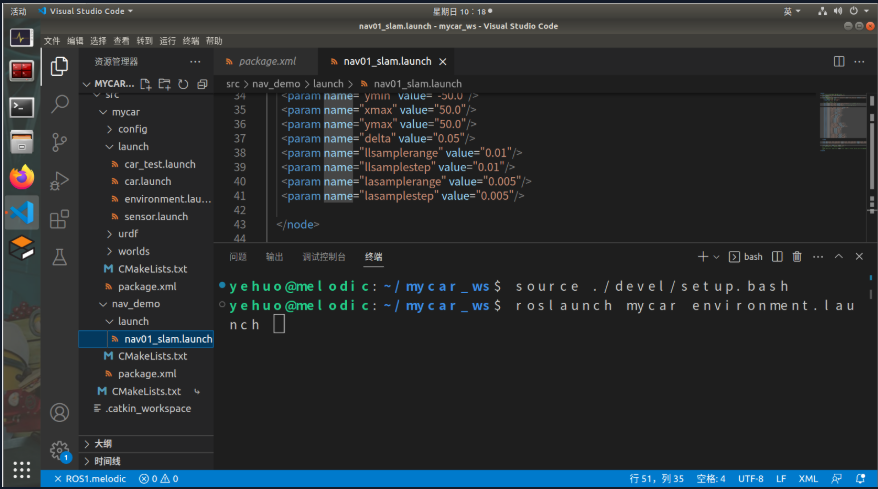
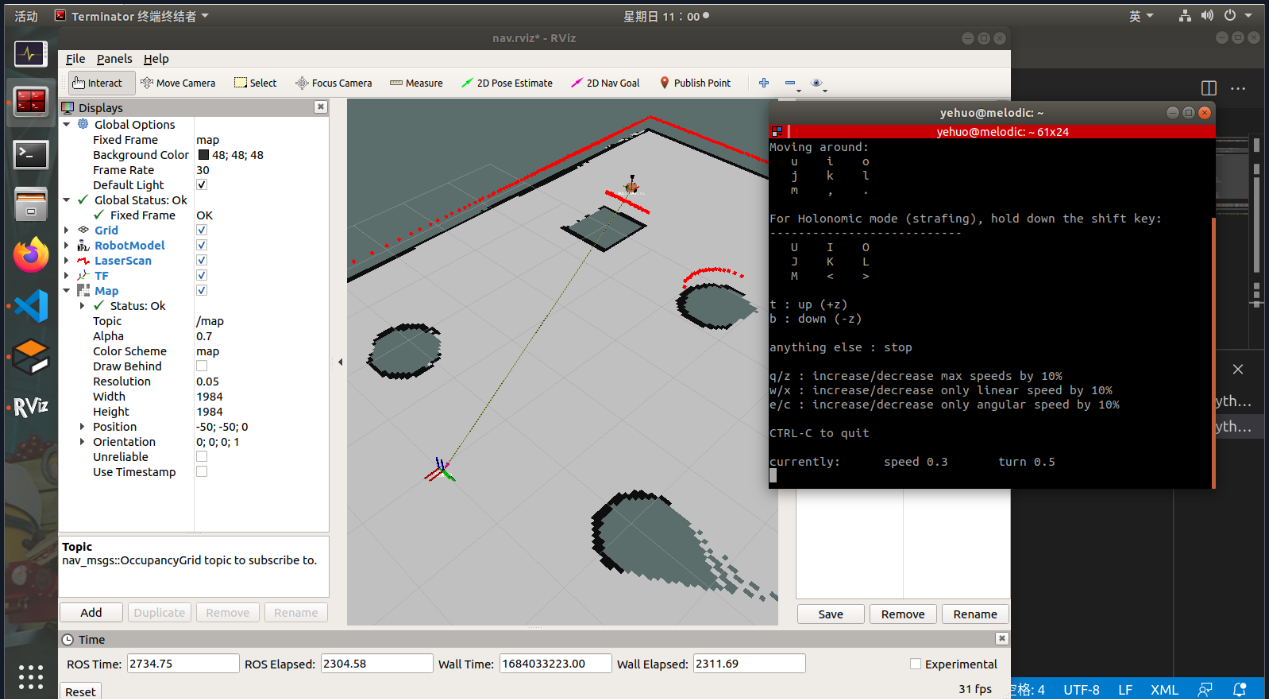
step2: 仿真环境运行 + SLAM建图
(1)编译+启动 gazebo 仿真环境
source ./devel/setup.bash
roslaunch mycar environment.launch

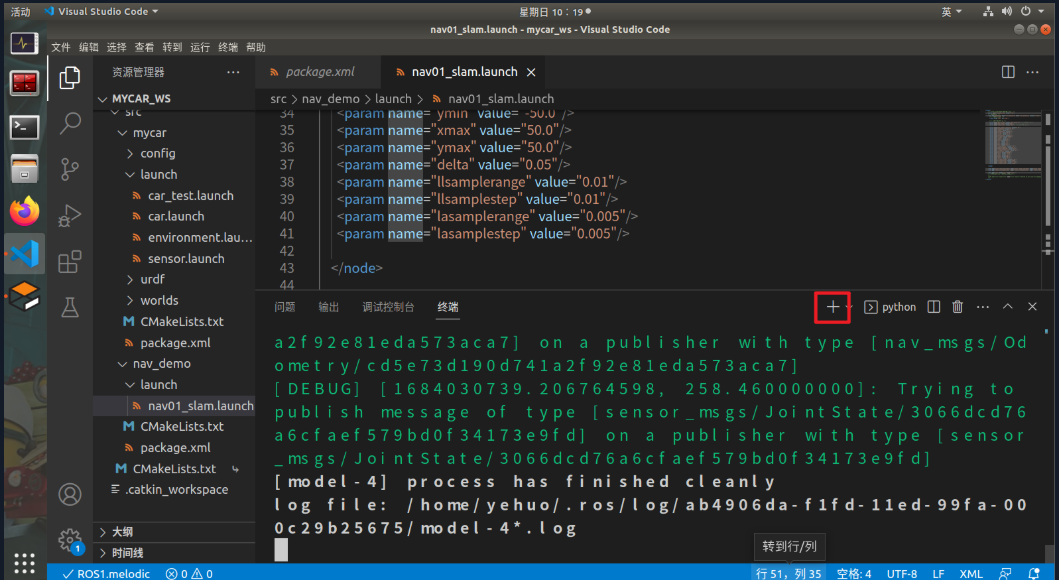
(2)启动 rviz
source ./devel/setup.bash
roslaunch nav_demo nav01_slam.launch

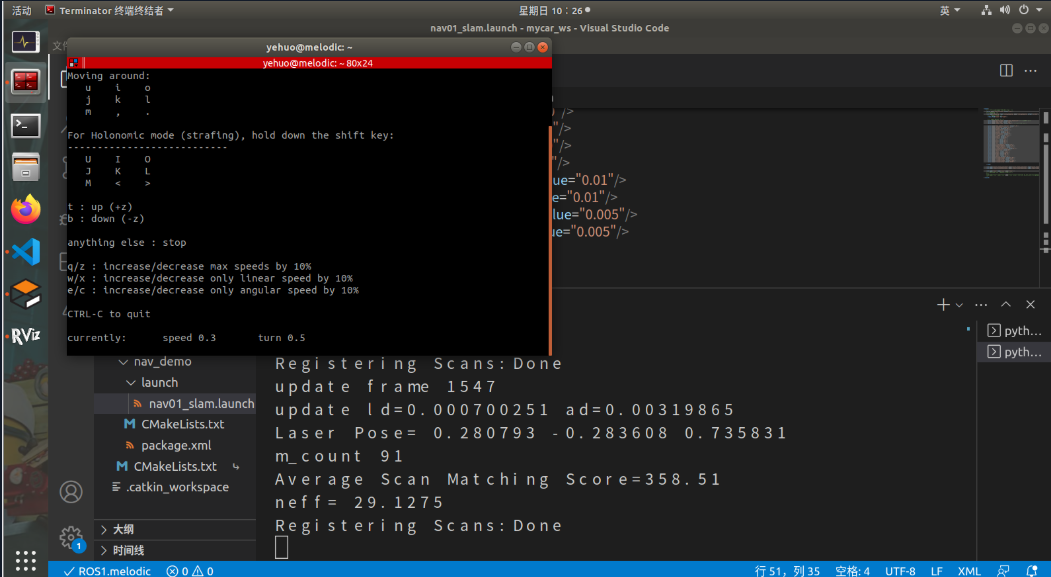
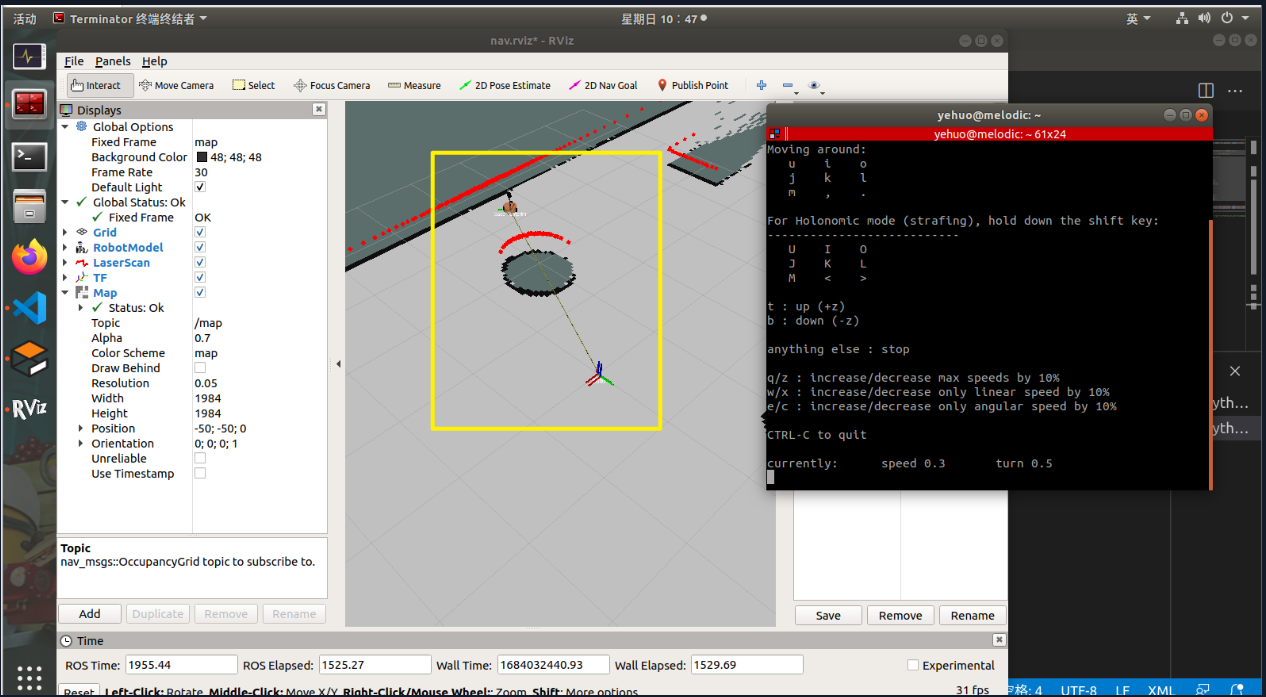
(3)启动键盘控制节点
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5
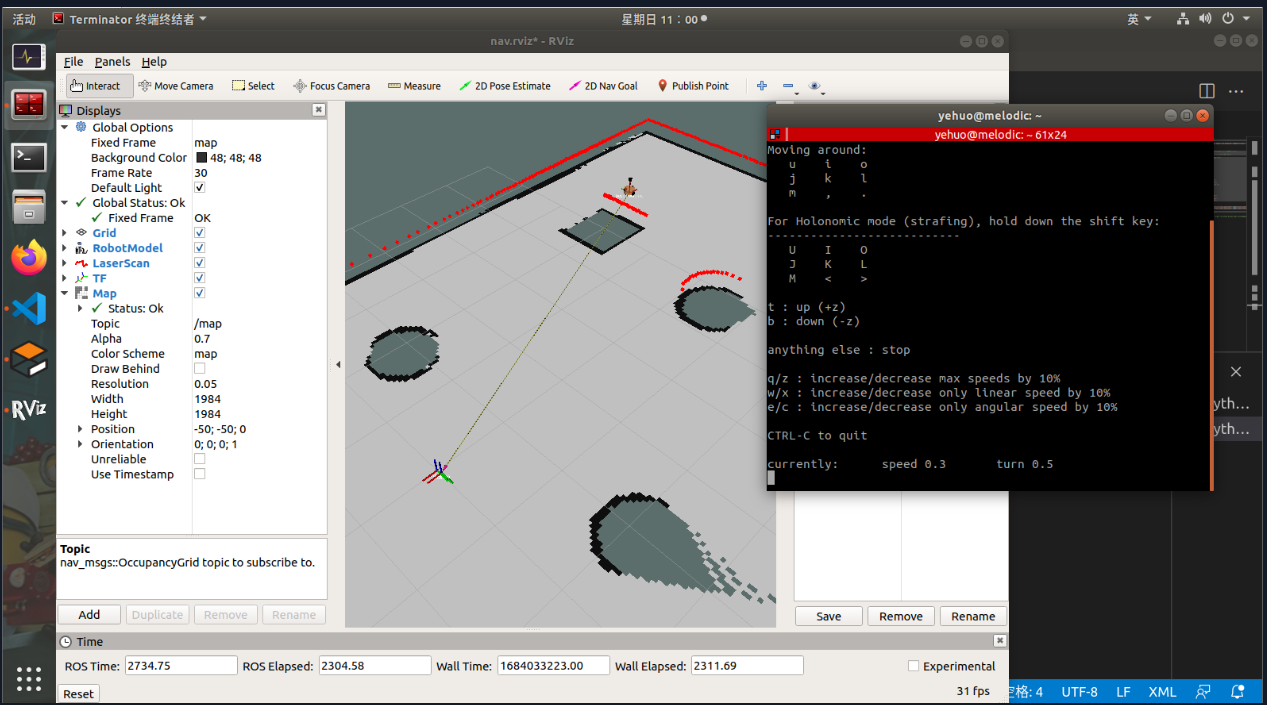
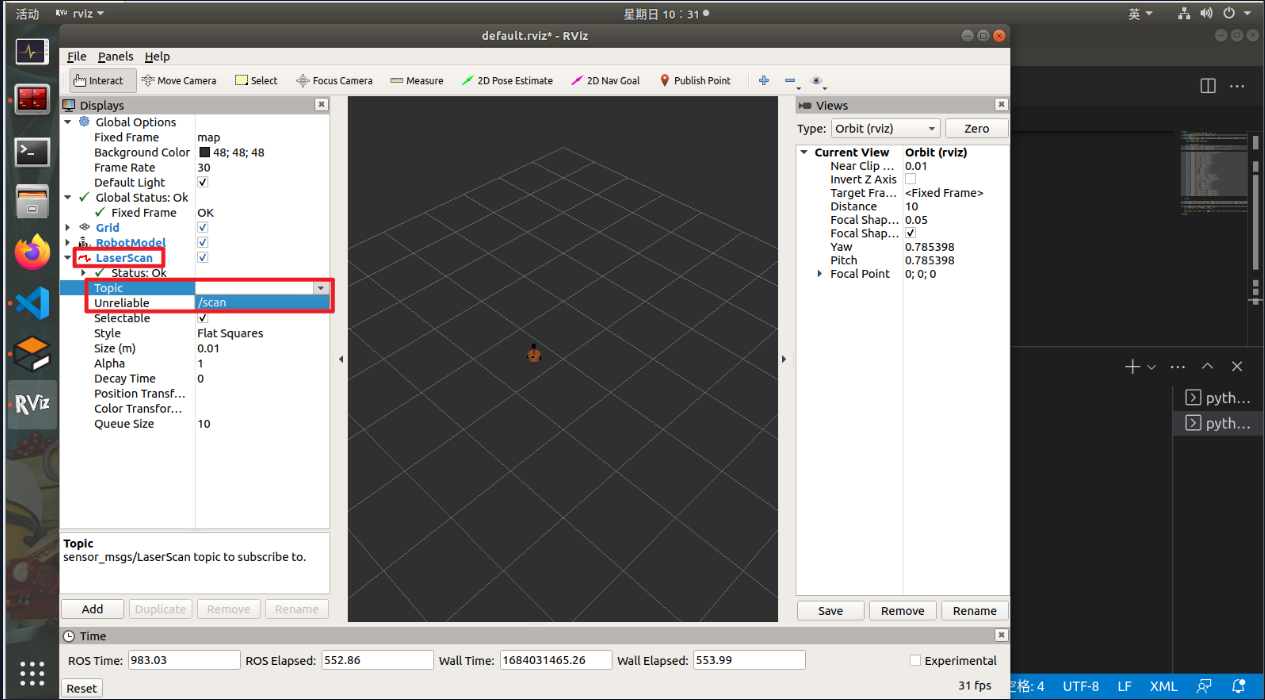
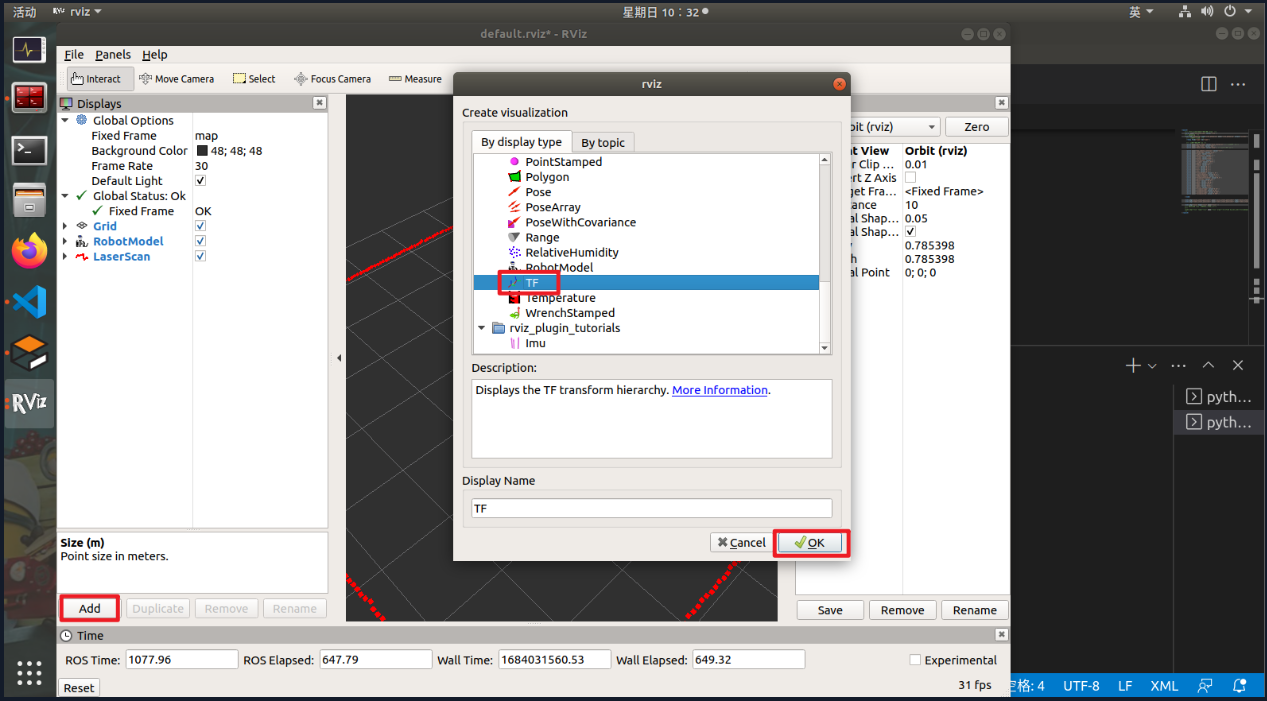
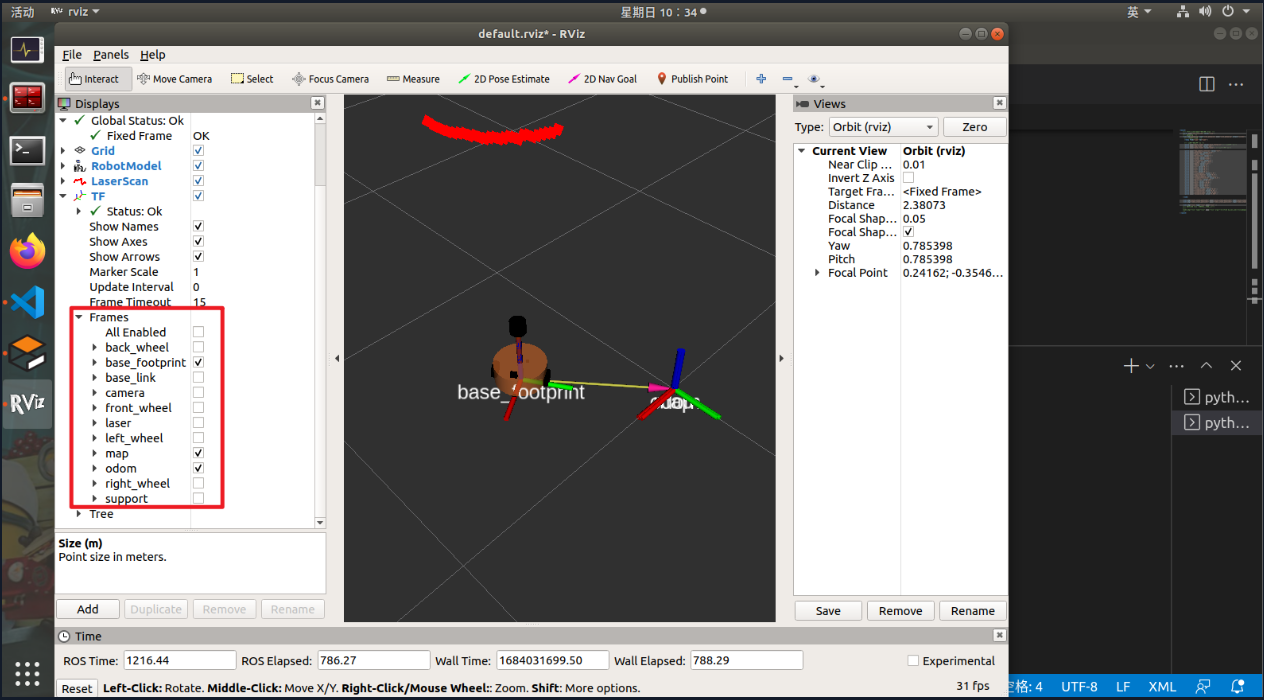
(4)在 rviz 中显示仿真环境


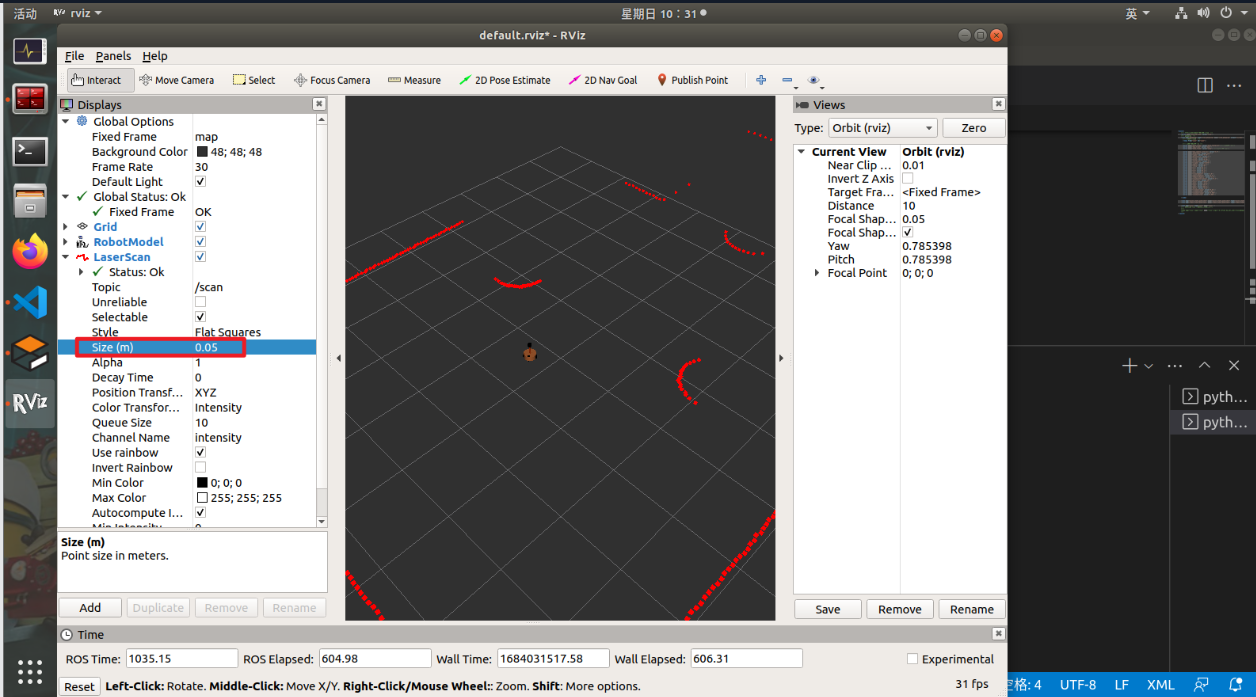
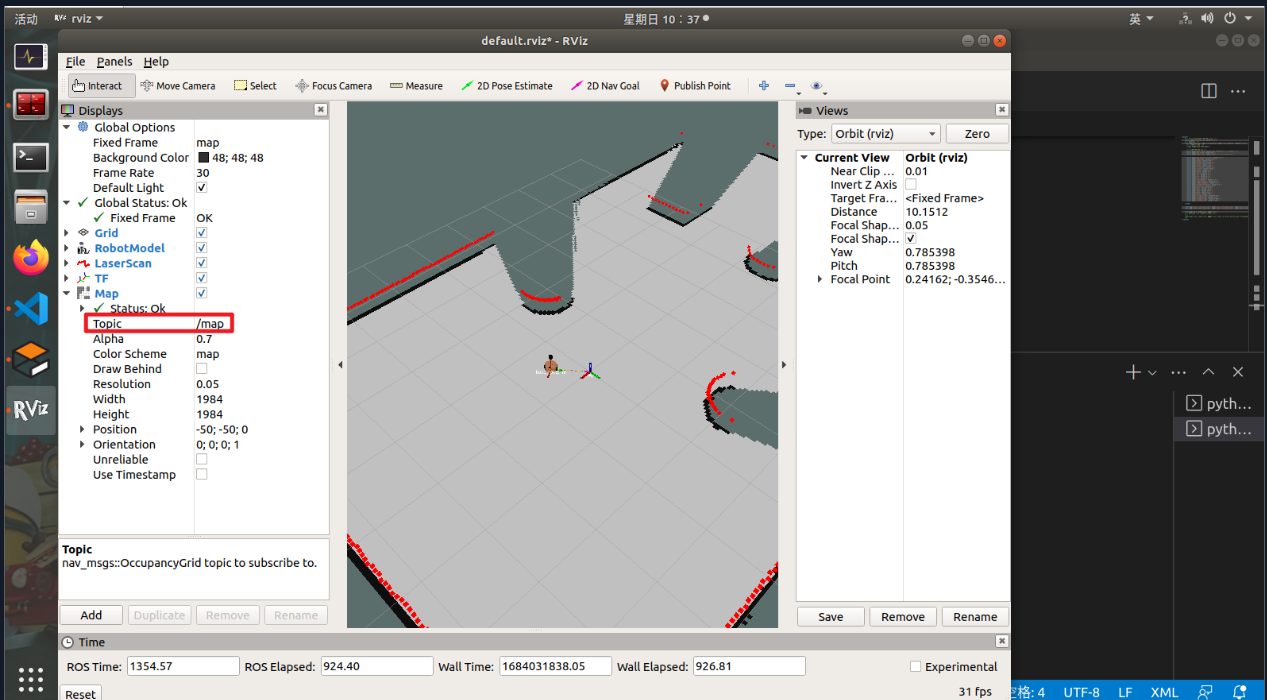
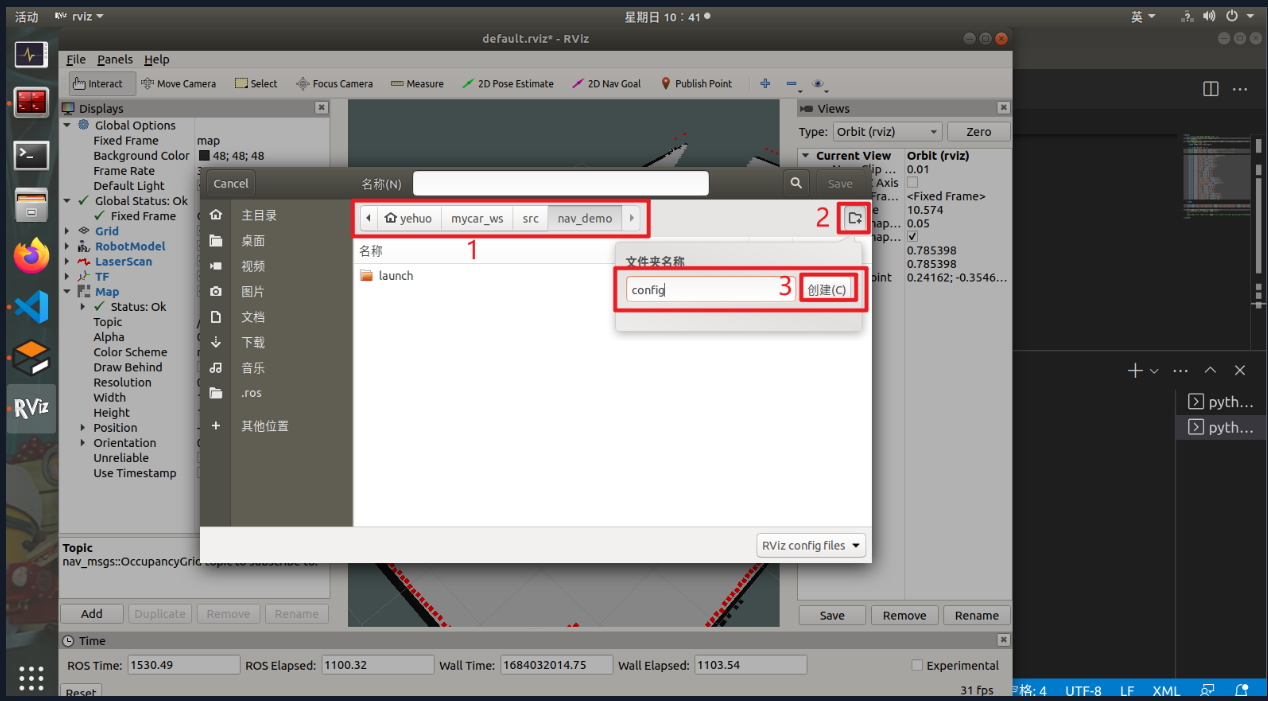
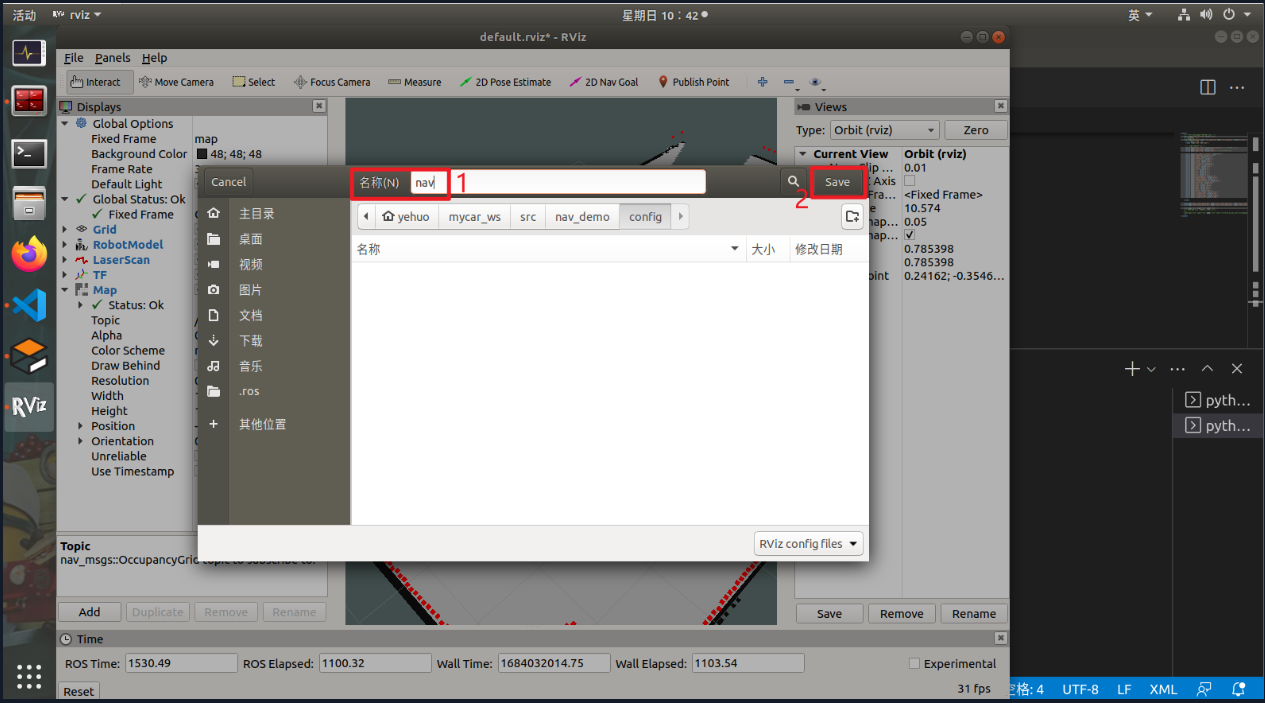
(5)保存 rviz 设置

(6)通过键盘控制机器人运动

每隔 5s 更新一次地图
step3: 保存地图(在step2基础上,不要关闭之前程序)
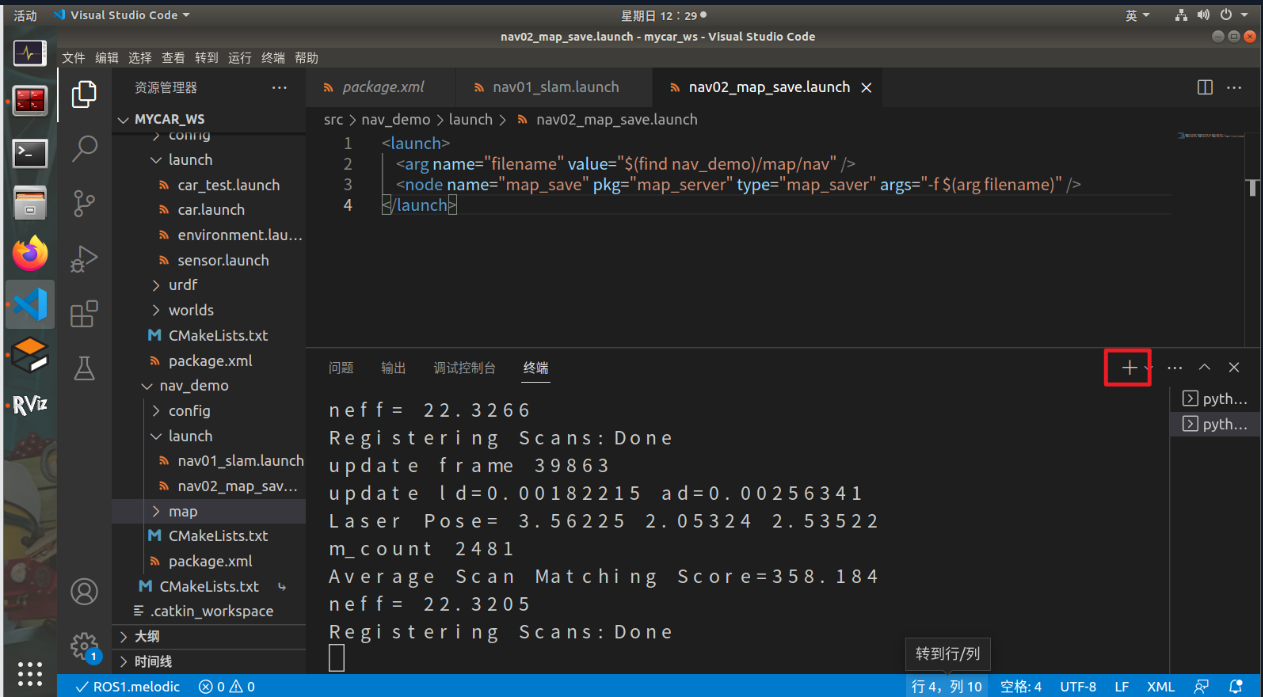
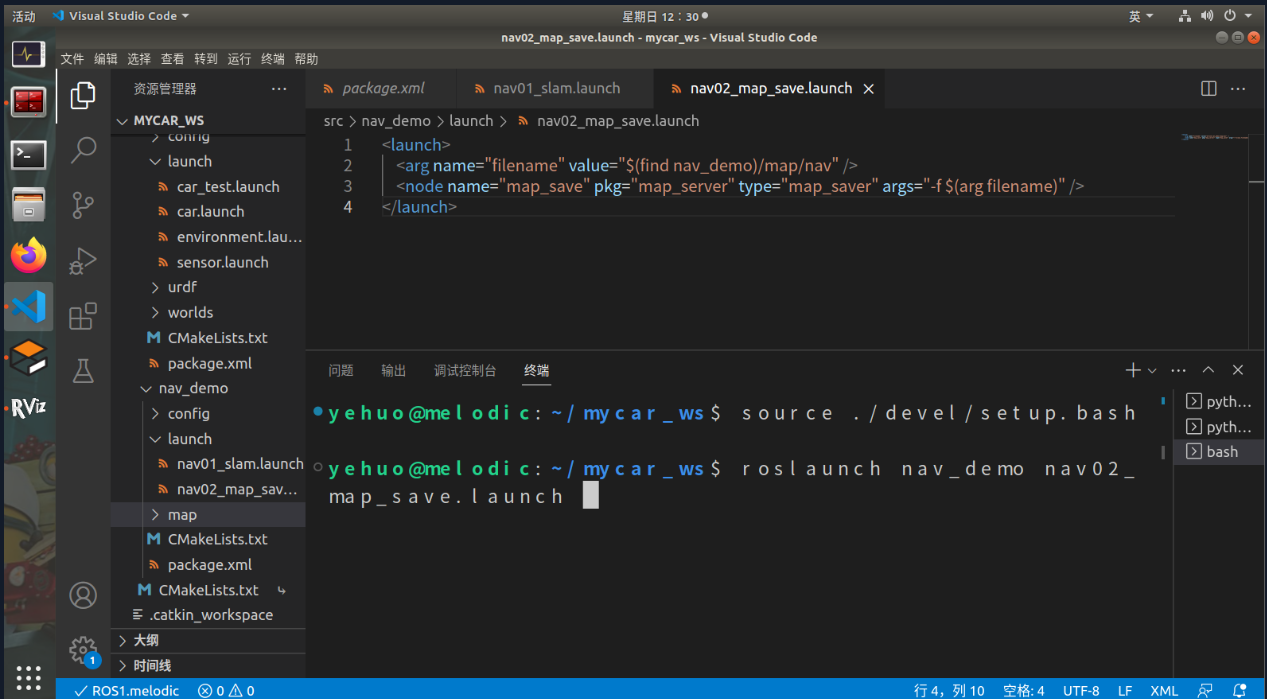
/home/yehuo/mycar_ws/src/nav_demo/launch/nav02_map_save.launch
<launch>
<arg name="filename" value="$(find nav_demo)/map/nav" />
<node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
</launch>
在 nav_demo 下新建文件夹 map
新建终端,保存地图
source ./devel/setup.bash
roslaunch nav_demo nav02_map_save.launch

step4: 读取地图
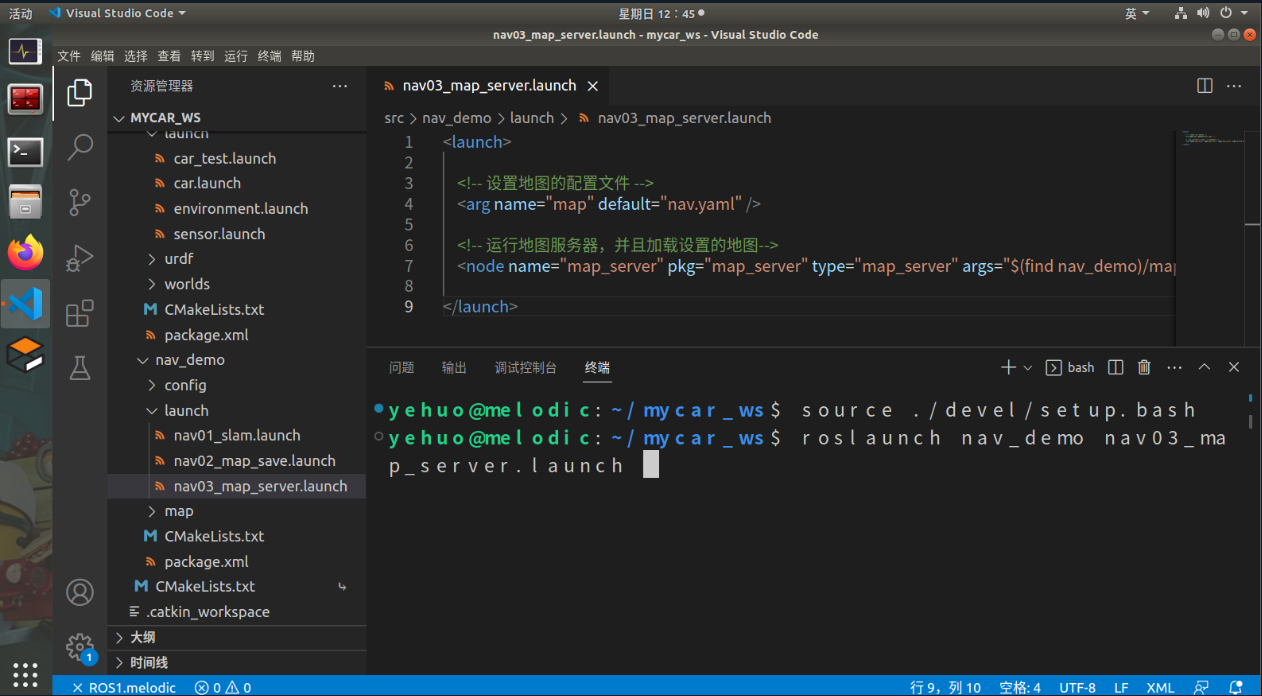
/home/yehuo/mycar_ws/src/nav_demo/launch/nav03_map_server.launch
<launch>
<!-- 设置地图的配置文件 -->
<arg name="map" default="nav.yaml" />
<!-- 运行地图服务器,并且加载设置的地图-->
<node name="map_server" pkg="map_server" type="map_server" args="$(find nav_demo)/map/$(arg map)"/>
</launch>
读取地图
source ./devel/setup.bash
roslaunch nav_demo nav03_map_server.launch
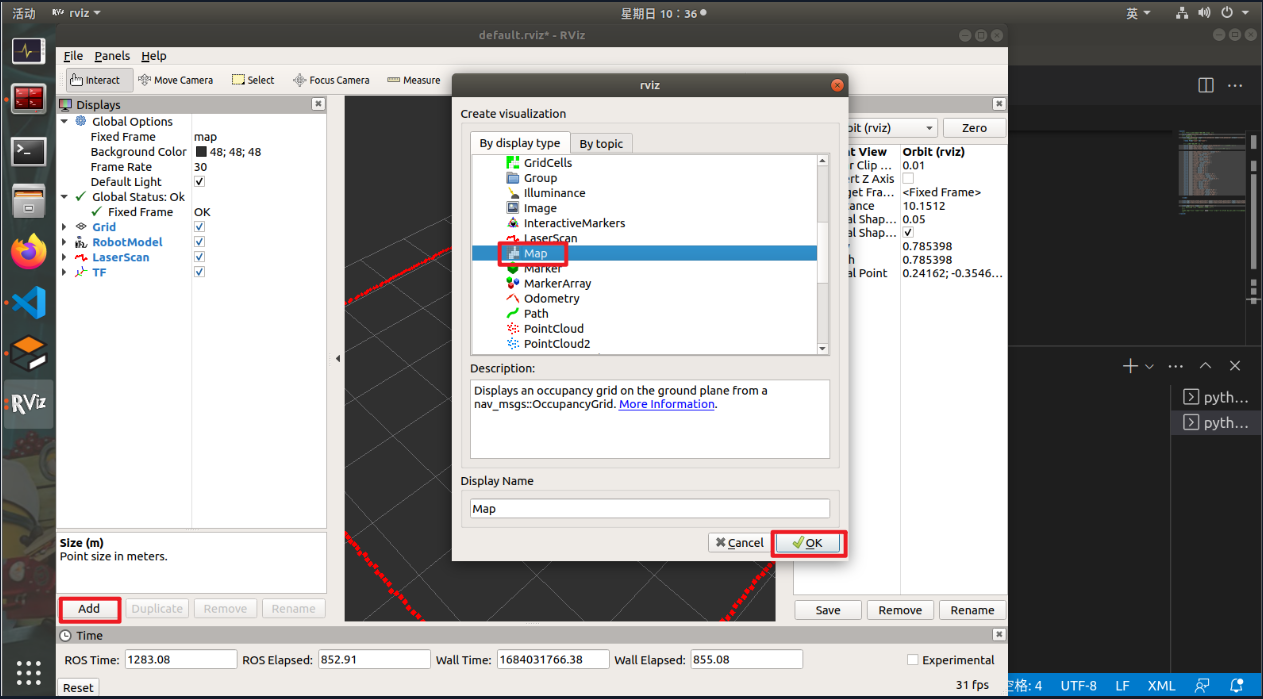
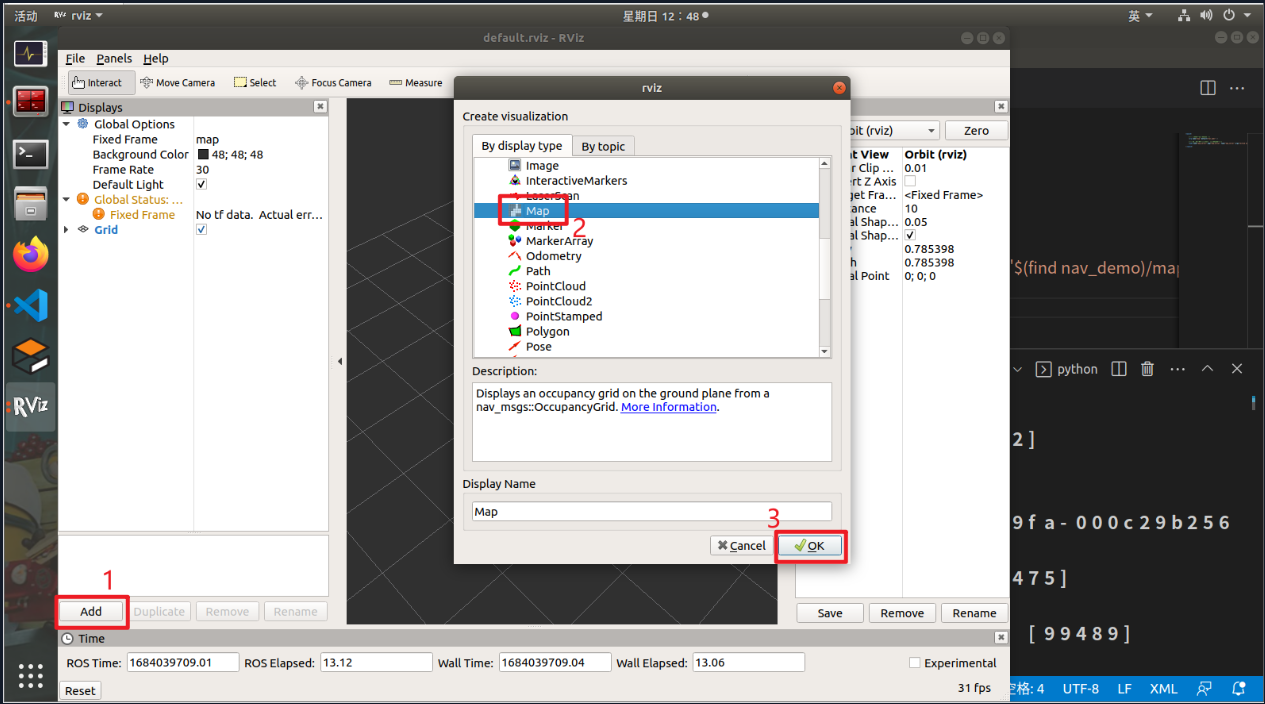
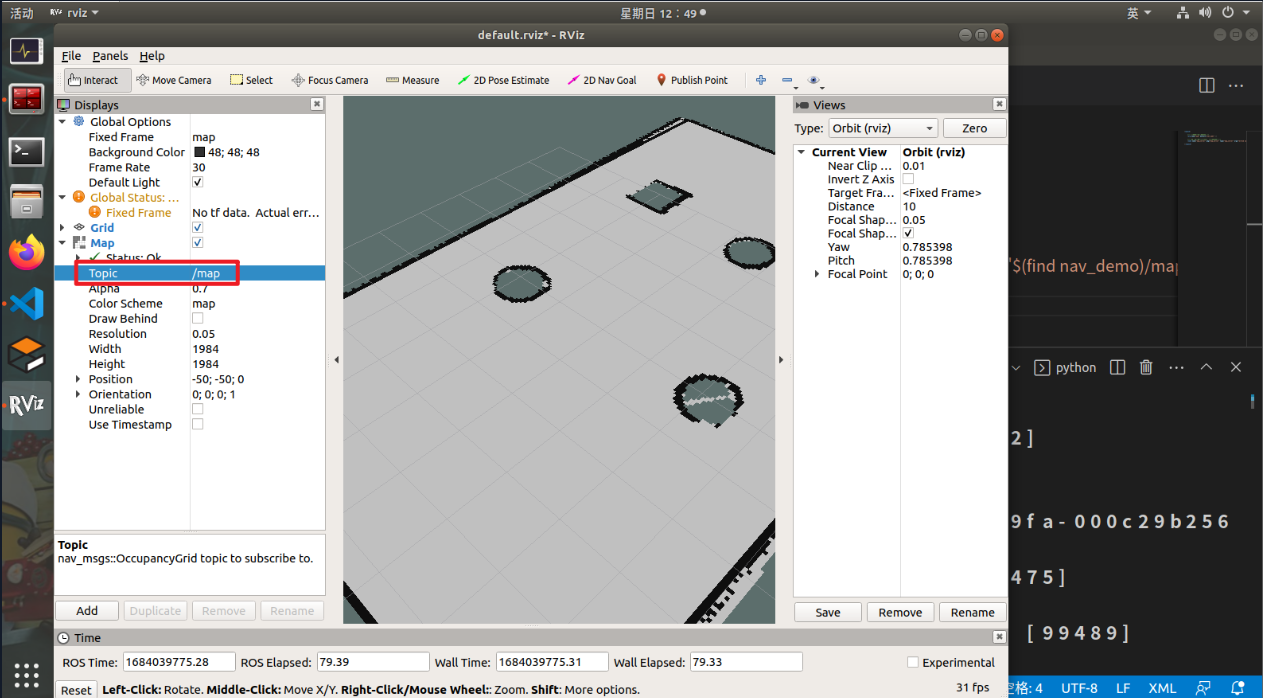
显示读取的地图
打开一个新的终端,启动 rviz

基于Gazebo搭建移动机器人,并结合SLAM系统完成定位和建图仿真的更多相关文章
- Gitea 与 Drone 集成实践:完全基于 Docker 搭建的轻量级 CI/CD 系统
Drone 是一个使用 Go 语言编写的自助式的持续集成平台,和 Gitea 一样可以完全基于容器部署,轻松扩展流水线规模.开发者只需要将持续集成过程通过简单的 YAML 语法写入 Gitea 仓库目 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 一个基于深度学习回环检测模块的简单双目 SLAM 系统
转载请注明出处,谢谢 原创作者:Mingrui 原创链接:https://www.cnblogs.com/MingruiYu/p/12634631.html 写在前面 最近在搞本科毕设,关于基于深度学 ...
- 案例 | 荔枝微课基于 kubernetes 搭建分布式压测系统
王诚强,荔枝微课基础架构负责人.热衷于基础技术研发推广,致力于提供稳定高效的基础架构,推进了荔枝微课集群化从0到1的发展,云原生架构持续演进的实践者. 本文根据2021年4月10日深圳站举办的[腾讯云 ...
- 第二篇 基于.net搭建热插拔式web框架(沙箱的构建)
上周五写了一个实现原理篇,在评论中看到有朋友也遇到了我的问题,真的是有种他乡遇知己的感觉,整个系列我一定会坚持写完,并在最后把代码开源到git中.上一篇文章很多人看了以后,都表示不解,觉得不知道我到底 ...
- 基于Eclipse搭建Hadoop源码环境
Hadoop使用ant+ivy组织工程,无法直接导入Eclipse中.本文将介绍如何基于Eclipse搭建Hadoop源码环境. 准备工作 本文使用的操作系统为CentOS.需要的软件版本:hadoo ...
- Centos7安装Docker 基于Dockerfile 搭建httpd运行环境
Centos7安装Docker 基于Dockerfile 搭建httpd运行环境 docker docker搭建 docker build 本文档完成目标内容如下 使用Docker搭建http服务器一 ...
- 基于Hexo搭建博客并部署到Github Pages
基于Hexo搭建博客并部署到Github Pages 之前在简书上写东西,觉得自己还是太浮躁.本来打算用Flask自己写一个,以为是微框架就比较简单,naive.HTML.CSS.JS等都要学啊,我几 ...
- Ubuntu 14.10下基于Nginx搭建mp4/flv流媒体服务器(可随意拖动)并支持RTMP/HLS协议(含转码工具)
Ubuntu 14.10下基于Nginx搭建mp4/flv流媒体服务器(可随意拖动)并支持RTMP/HLS协议(含转码工具) 最近因为项目关系,收朋友之托,想制作秀场网站,但是因为之前一直没有涉及到这 ...
- 基于docker搭建开源扫描器——伏羲
基于docker搭建开源扫描器——伏羲 1.简介 项目地址 伏羲是一款开源的安全检测工具,适用于中小型企业对企业内部进行安全检测和资产统计. 功能一览: 基于插件的漏洞扫描功能(类似于巡风) 漏洞管理 ...
随机推荐
- LaTeX in 24 Hours - 1. Introduction
文章目录 1.1 What is LaTeX? 1.2 Why LaTeX Over Other Word Processors 1.3 How to Prepare a LaTeX Input Fi ...
- 明解STM32—GPIO理论基础知识篇之八种工作模式
一.引言 在之前围绕STM32的GPIO的基本结构进行了介绍,图1为STM32的5V容忍的GPIO口内部基本结构图,图2为GPIO的基本结构中各个模块部分的概述. 阅读GPIO基本结构的内容能够对GP ...
- 与NewBing一起写作:《Web应用安全入门》
前言 本文内容基于我的<Web应用安全入门>公开课视频. Prompt:下面是一篇课程音频转录后的文本,请把它转成老师和学生对话形式的文本,要求遵循原文结构,语言衔接流畅,保持 Markd ...
- 在一张 24 GB 的消费级显卡上用 RLHF 微调 20B LLMs
我们很高兴正式发布 trl 与 peft 的集成,使任何人都可以更轻松地使用强化学习进行大型语言模型 (LLM) 微调!在这篇文章中,我们解释了为什么这是现有微调方法的有竞争力的替代方案. 请注意, ...
- STL常用容器用法总结
vector 变长数组,倍增的思想 size() 返回元素个数 empty() 返回是否为空 clear() 清空 front()/back() push_back()/pop_back() begi ...
- Cannot read properties of undefined (reading 'toUpperCase')
无法读取 JS 中未定义的属性"toUpperCase"|鲍比哈兹 (bobbyhadz.com) 根据其中的内容找到了答案:使用了未定义的属性去使用toUpperCase()函数 ...
- CoordConv:给你的卷积加上坐标
摘要:本文主要对CoordConv的理论进行了介绍,对其进行了复现,并展示了其在网络结构中的用法. 本文分享自华为云社区<CoordConv:给你的卷积加上坐标>,作者: 李长安. 一.理 ...
- 五月九号java基础知识点
1.哈希集合元素不按顺序排序,若要排序使用LinkedHashSet类2.树集合类不仅实现Set接口,还实现java.lang.SortedSet接口来实现排序操作3.TreeSet<Strin ...
- LeeCode 动态规划(二)
01背包问题 题目描述 有 n 件物品和容量为 w 的背包,给你两个数组 weights 和 values ,分别表示第 i 件物品的重量和价值,每件物品只能使用一次,求解将哪些物品装入背包可使得物品 ...
- ASP.NET Core - 缓存之内存缓存(下)
话接上篇 [ASP.NET Core - 缓存之内存缓存(上)],所以这里的目录从 2.4 开始. 2.4 MemoryCacheEntryOptions MemoryCacheEntryOption ...