Channel Estimation for High Speed Wireless Systems using Gaussian Particle Filter and Auxiliary Particle Filter
论文来源
International Conference on Communication and Signal Processing, April 4-6, 2019, India,Gargi Rajam, P. Sandeeptha and Sudheesh P
摘要
无线通信系统是从一个设备到另一个设备的传输介质。由于多径和多普勒频移,无误差传播变得不可能被实现。信道估计作为一种提高无线系统传输可靠性的技术变得越来越受欢迎。本篇论文通过使用GPF(Gaussian Particle Filter)和APF(Auxiliary Particle Filter)来进行信道估计。
基本概念
1.时变信道
在移动通信系统中由于收发双方的信道随着周围环境的变化而改变,但是由于系统的高移动性,使得信道发生快速变化.在接收端就会接收到由于多径产生的不同的频率响应.而使用PF(Particle Filter)或者SMC(Sequential Monte Carlo)可以解决这个问题.状态方程如下:
\]
\]
其中, A是协方差矩阵如下所示:
\left\{
\begin{matrix}
a_{11} & \cdots & a_{1n}\\
\vdots & \ddots & \vdots \\
a_{n1} & \cdots & a_{nn}
\end{matrix}
\right\}
\]
\(x_t= \left[ \begin{matrix} x_t(0) & \cdots & x_t(m-1) \end{matrix} \right]\) 是第t个时刻的输入向量.
\(h_t= \left[ \begin{matrix} h_t(0) & \cdots & h_t(n-1) \end{matrix} \right]\) 是第t个时刻的信道系数.
\(y_t= \left[ \begin{matrix} y_t(0) & \cdots & y_t(m+n-1) \end{matrix} \right]\) 是第t个时刻的输出向量.
\(w_t= \left[ \begin{matrix} w_t(0) & \cdots & w_t(n-1) \end{matrix} \right]\) 是第t个时刻的系统噪声.
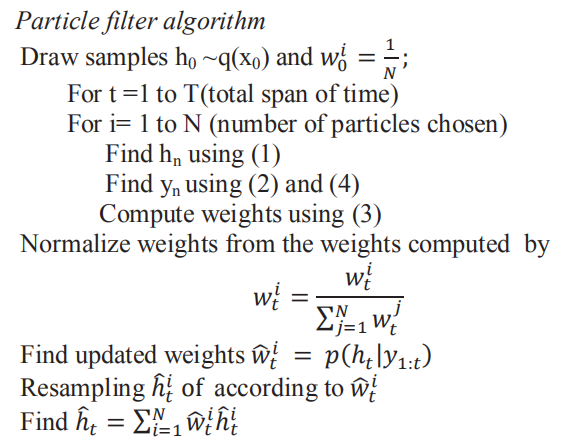
2.粒子滤波
粒子滤波器广泛应用于通信、信号处理、图像处理、视觉和目标跟踪等领域.具体算法如下:
1)初始化N个权重相等的随机粒子.
2)根据贝叶斯公式:\(zw_t \propto w^i_{t-1}* \frac{p(y_t|x^i_t)p(y_t|x^i_{t-1})}{q(x^i_t|x^i_{t-1},y_t)}\) .权重近似为:\(w_t = p(y_t|h^i_t)\)
3) 重采样
具体如下图所示:
3.高斯粒子滤波
GPF(Gaussian Particle Filter)比EKF(Extend Kalman Filter)和UKF(Unscented Kalman Filter)有更快的收敛性.
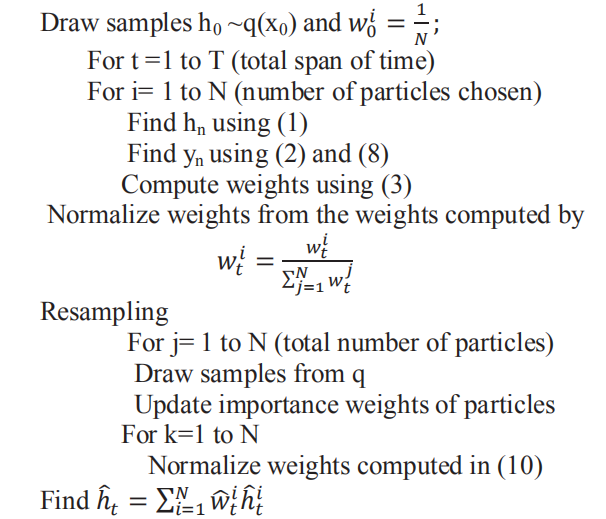
4.辅助粒子滤波
APF(Auxiliary Particle Filter)均匀的改变权重,防止问题过快退化.但是更好的适用于少量数据的估计.算法具体如下
比较
PF,GPF和APF估计的信道均方误差如下所示:

均方误差公式为$$ RMSE = \sqrt{ \frac{ \sum_{i=1}^T(h_t-\hat{h_t})^2}{T}} $$
GPF克服了这一问题,因为收敛速度更快,但需要更多的粒子数.
APF显示出更好的结果,不会在粒子数和通道长度之间做任何妥协.
借鉴之处
1.将同一问题的不同解决方法放在一块比较.(可提出新的优化方法)
2.使用均方误差来对不同方法估计出的信道进行评判好坏.
Channel Estimation for High Speed Wireless Systems using Gaussian Particle Filter and Auxiliary Particle Filter的更多相关文章
- 信道估计(channel estimation)图解——从SISO到MIMO原理介绍
1. 引言 在所有通信中,信号都会通过一个介质(称为信道),并且信号会失真,或者在信号通过信道时会向信号中添加各种噪声.正确解码接收到的信号而没有太多错误的方法是从接收到的信号中消除信道施加的失真和噪 ...
- Introducing Microsoft Sync Framework: Sync Services for File Systems
https://msdn.microsoft.com/en-us/sync/bb887623 Introduction to Microsoft Sync Framework File Synchro ...
- Cesium中级教程8 - Introduction to Particle Systems 粒子系统入门
Cesium中文网:http://cesiumcn.org/ | 国内快速访问:http://cesium.coinidea.com/ What is a particle system? 什么是粒子 ...
- usb.ids
# # List of USB ID's # # Maintained by Vojtech Pavlik <vojtech@suse.cz> # If you have any new ...
- ACM会议列表与介绍(2014/05/06)
Conferences ACM SEACM Southeast Regional Conference ACM Southeast Regional Conference the oldest, co ...
- 简明Python3教程 1.翻译
这里有许许多多本书不同语言的译本,感谢那些不知疲倦的志愿者们! 如果你想帮助这些译本,请参看下面的关于志愿者和语言的列表,然后决定是要开始一个新的翻译项目还是帮助改进现有的翻译项目. 如果你计划开始一 ...
- 斯坦福CS课程列表
http://exploredegrees.stanford.edu/coursedescriptions/cs/ CS 101. Introduction to Computing Principl ...
- LTE Air interface Channels-----http://www.rfwireless-world.com/Tutorials/LTE-logical-transport-physical-channels.html
LTE technology works based on three channel types viz. logical channel,transport channel and physica ...
- linux运维中的命令梳理(四)
----------管理命令---------- ps命令:查看进程 要对系统中进程进行监测控制,查看状态,内存,CPU的使用情况,使用命令:/bin/ps (1) ps :是显示瞬间进程的状态,并不 ...
随机推荐
- springboot FreeMarker template error
注释掉<#list>xxx</#list> 现在运行就不报错了
- python,winreg,获取当前系统的桌面绝对路径
import winreg import os def main(): new_path = os.path.join(desktop_path(), 'aaa.xlsx') # 结果为:C:\\Us ...
- 吴裕雄--天生自然python学习笔记:python 用 Open CV抓取摄像头视频图像
Open CV 除了可以读取.显示静态图片外 , 还可 以加载及播放动态影片, 以 及 读取内置或外接摄像头的图像信息 . 很多笔记本电脑都具有摄像头 , OpenCV 可通过 VideoC aptu ...
- G - KiKi's K-Number(树状数组求区间第k大)
For the k-th number, we all should be very familiar with it. Of course,to kiki it is also simple. No ...
- linux系统权限(基本权限)
linux的系统权限:r-- 100 4-w- 010 2--x 001 1 [root@localhost ~]# ll -d dir drwxrwxrwx root root Nov : di ...
- BZOJ 2318: Spoj4060 game with probability Problem (概率dp)(博弈论)
2318: Spoj4060 game with probability Problem Description Alice和Bob在玩一个游戏.有n个石子在这里,Alice和Bob轮流投掷硬币,如果 ...
- python学习笔记(15)pymysql数据库操作
pymysql数据库操作 1.什么是PyMySQL 为了使python连接上数据库,你需要一个驱动,这个驱动是用于与数据库交互的库. PyMySQL : 这是一个使Python连接到MySQL的库,它 ...
- 复杂的Polygon
- MRP执行计划列表(禁用)
1.最直接的方法,推进方法 2.比较麻烦的方法
- 手撸GBDT原理(未完成)
一直对GBDT里面的具体计算逻辑不太清楚,在网上发现了一篇好博客. 先上总结的关系图 GBDT对类别变量是怎么处理的? 这些东西都是在网上发现的,讲的挺好的. GBDT原理与Sklearn源码分析-回 ...