洛谷——P1126 机器人搬重物
P1126 机器人搬重物
题目描述
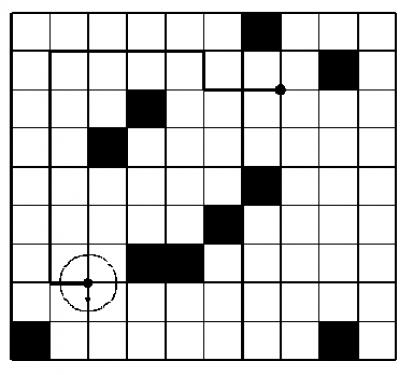
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径1.6米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个N*M的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动1步(Creep);向前移动2步(Walk);向前移动3步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为1秒。请你计算一下机器人完成任务所需的最少时间。
输入输出格式
输入格式:
输入的第一行为两个正整数N,M(N,M<=50),下面N行是储藏室的构造,0表示无障碍,1表示有障碍,数字之间用一个空格隔开。接着一行有四个整数和一个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东E,南S,西W,北N),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式:
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出-1。
输入输出样例
9 10 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 7 2 2 7 S
#include<queue>
#include<cstdio>
#include<cstring>
#include<iostream>
#include<algorithm>
#define N 100
using namespace std;
char ch;
];
int n,m,d,sx,sy,ex,ey,dis[N][N];
][]={{,,},{-,-,-},{,,},{,,}};
][]={{-,-,-},{,,},{,,},{,,}};
int read()
{
,f=; char ch=getchar();
') ch=getchar();
+ch-',ch=getchar();
return x*f;
}
struct Que
{
int x,y,d,step;
}que;
queue<Que>q;
int main()
{
n=read(),m=read();
;i<=n;i++)
;j<=m;j++)
{
vis[i][j]=read();
if(vis[i][j])
vis[i-][j]=vis[i-][j-]=vis[i][j-]=true;
}
sx=read(),sy=read();
ex=read(),ey=read();
cin>>ch;vis[sx][sy]=;
;
;
;
;
que.x=sx,que.y=sy;
dis[sx][sy]=que.step=;
vist[sx][sy][que.d]=true;
q.push(que);
while(!q.empty())
{
Que p=q.front();q.pop();
;}
;i<;i++)
{
int x=p.x+xx[p.d][i],y=p.y+yy[p.d][i];
||y<||x>=n||y>=m||vis[x][y]) break;
if(vist[x][y][p.d]) continue;
vist[x][y][p.d]=true;
que.x=x,que.y=y,que.d=p.d,que.step=p.step+;
q.push(que);
}
que.x=p.x,que.y=p.y,que.d=p.d+,que.step=p.step+;
==) que.d=;
if(!vist[que.x][que.y][que.d]) vist[que.x][que.y][que.d]=true,q.push(que);
que.x=p.x,que.y=p.y,que.d=p.d-,que.step=p.step+;
==-) que.d=;
if(!vist[que.x][que.y][que.d])
vist[p.x][p.y][p.d]=true,q.push(que);
}
printf("-1");
;
}
洛谷——P1126 机器人搬重物的更多相关文章
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126 题意: 给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动. 每一秒钟可以向左转,向右转 ...
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷 P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径 $1.6 米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个 N×MN \times MN×M ...
- 洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机 ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- emacs设置字体
* C-h f set-default-font set-default-font is an alias for `set-frame-font' in `frame.el'. (set-defau ...
- Android CTS - Cannot run program "aapt"/ Fail to run aapt on .../apk installed but AaptParser failed
今天同事碰到cts的一些问题,跑到某个apk的时候,就提示如下错误: Cannot run program "aapt": error=2. No such file or dir ...
- golang连接orcale
使用glang有一段时间了,最开始其实并不太喜欢他的语法,但是后来熟悉之后发现用起来还挺爽的.之前数据库一直使用mysql,连接起来没有什么问题,github上有很多完善的驱动,所以以为连接其他数据库 ...
- BZOJ 4244: 邮戳拉力赛
转化为括号序列DP 注意边界 #include<cstdio> #include<algorithm> #define rep(i,x,y) for (int i=x; i&l ...
- python基础学习笔记——类空间问题以及类之间的关系
一. 类的空间问题 1.1 何处可以添加对象属性 class A: def __init__(self,name): self.name = name def func(self,sex): self ...
- iOS开发~CocoaPods安装和使用
随着 iOS 开发者的增多,业界也出现了为 iOS 程序提供依赖管理的工具,它的名字叫做:CocoaPods. CocoaPods项目的源码 在 Github 上管理.该项目开始于 2011 年 8 ...
- python-高级编程-05-异步IO
[异步非阻塞IO] ------------------------------------------------------------------------------------------ ...
- SDOJ 3742 黑白图
[描述] 一个 n 个点 m 条边构成的无向带权图.由一些黑点与白点构成 树现在每个白点都要与他距离最近的黑点通过最短路连接(如果有很多个,可以选 取其中任意一个),我们想要使得花费的代价最小.请问这 ...
- 博客笔记(blog notebook)
1. 机器学习 2. NLP 3. code 实际好人 实际坏人 预测百分比 预测好人 \(p_GF^c(s_c\|G)\) \(p_BF^c(s_c\|B)\) \(F^c(s_c)\) 预测坏人 ...
- struts2和spring的两种整合方式
首先,来看看如何让Spring 来管理Action. 在struts.xml中加入 <constant name="struts.objectFactory" value=& ...