洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126
题意:
给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动。
每一秒钟可以向左转,向右转或者直走1步2步或是3步。
现在给定一个起点和开始的朝向,问走到终点至少要多少时间。
思路:
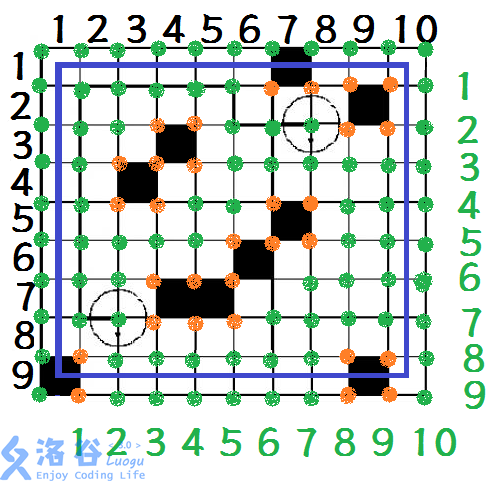
真是一道狗屎坑题。题目给出的是格点,而机器人是在交点上运动的。
盗用一下洛谷@雒仁韬的图。题目给出的障碍物其实是橙色的四个点中的右下角的这个。
而且由于球的直径,最外围边界并不能走到。如果正确理解了题意的话应该就没问题了。
由于有方向,所以用三维数组来存某点是否被访问。
#include<stdio.h>
#include<stdlib.h>
#include<map>
#include<set>
#include<iostream>
#include<cstring>
#include<algorithm>
#include<vector>
#include<queue> using namespace std; int n, m;
int mat[][];
//0E, 1S, 2W, 3N
int dx[][] = {{, , }, {, , }, {, , }, {-, -, -}};
int dy[][] = {{, , }, {, , }, {-, -, -}, {, , }};
bool vis[][][];
struct node{
int x, y;
int dir;
int t;
}st, ed; int getdir(char c)
{
if(c == 'E')return ;
if(c == 'S')return ;
if(c == 'W')return ;
if(c == 'N')return ;
} bool check(int i, int j)
{
return (i >= && i < n && j >= && j < m);
} int main()
{
scanf("%d%d", &n, &m);
for(int i = ; i <= n; i++){
for(int j = ; j <= m; j++){
scanf("%d", &mat[i][j]);
if(mat[i][j]){
mat[i - ][j] = ;
mat[i][j - ] = ;
mat[i - ][j - ] = ;
}
}
} scanf("%d%d%d%d", &st.x, &st.y, &ed.x, &ed.y);
char dir;
//st.x--;st.y--;ed.x--;ed.y--;
getchar();
scanf("%c", &dir);
st.dir = getdir(dir);
st.t = ; queue<node>que;
que.push(st);
vis[st.x][st.y][st.dir] = true;
int ans = -;
while(!que.empty()){
node now = que.front();que.pop();
//cout<<endl<<now.x<<" "<<now.y<<" "<<now.t<<endl;
if(now.x == ed.x && now.y == ed.y){
ans = now.t;
break;
}
node to;
to.x = now.x;to.y = now.y;to.t = now.t + ;
to.dir = (now.dir + ) % ;
if(!vis[to.x][to.y][to.dir]){
vis[to.x][to.y][to.dir] = true;
que.push(to);
}
to.dir = (now.dir - + ) % ;
if(!vis[to.x][to.y][to.dir]){
vis[to.x][to.y][to.dir] = true;
que.push(to);
} to.dir = now.dir;
for(int i = ; i < ; i++){
to.x = now.x + dx[to.dir][i];
to.y = now.y + dy[to.dir][i];
if(mat[to.x][to.y])break;
if(check(to.x, to.y) && !vis[to.x][to.y][to.dir]){
vis[to.x][to.y][to.dir] = true;
que.push(to);
//cout<<to.x<<" "<<to.y<<" "<<to.t<<endl;
}
}
} cout<<ans<<endl; return ;
}
洛谷P1126 机器人搬重物【bfs】的更多相关文章
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷——P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷 P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径 $1.6 米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个 N×MN \times MN×M ...
- 洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机 ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- C# System.Collections.Queue
using System; using System.Collections; public class SamplesQueue { public static void Main() { // C ...
- 使用Buildozer部署Kivy到移动设备上
在安装好Buildozer软件之后,我们在包含main.py的文件夹下运行buildozer init这个命令,然后我们就会看到在该文件夹下有一个buildozer.spec这个文件,这个文件主要是用 ...
- 阿里云的免费型DV SSL证书
阿里云提供的免费型DV SSL. 证书的说明: [公告]免费新根证书,切入DigiCert PKI体系,兼容性如下操作系统版本IOS 5.0+.Android 2.3.3+.JRE 1.6.5+.WI ...
- 【Windows】cmd条件判断
1.判断驱动器.文件或文件夹是否存在,用 if exist 语句: 2.判断某两个字符串是否相等,用 if "字符串1"=="字符串2" 语句: 3.判断某两个 ...
- SQL Server 数据库基础笔记分享(下)
前言 本文是个人学习SQL Server 数据库时的以往笔记的整理,内容主要是对数据库的基本增删改查的SQL语句操作和约束,视图,存储过程,触发器的基本了解. 注:内容比较基础,适合入门者对SQL S ...
- 谈谈MySQL的do语句
[select在某些场景下的不足] 比如说我们想让MySQL暂停5秒.那么可以这样写 ); +----------+ ) | +----------+ | +----------+ row in se ...
- etcd 集群运维实践
etcd 是 Kubernetes 集群的数据核心,最严重的情况是,当 etcd 出问题彻底无法恢复的时候,解决问题的办法可能只有重新搭建一个环境.因此围绕 etcd 相关的运维知识就比较重要,etc ...
- Push to origin/master was rejected (Git提交错误)(转)
[问题描述] 在使用Git Push代码的时候,会出现 Push to origin/master was rejected 的错误提示. 在第一次提交到代码仓库的时候非常容易出现,因为初始化的仓库和 ...
- 【emWin】例程十一:GIF图像显示
介绍: 本例程介绍gif格式图像显示的方法以及在GMT70,iCore3_ADP,7寸液晶模块.4.3寸液晶模块, VGA模块上的移植. 实验指导书及代码包下载: 链接:http://pan.baid ...
- JavaScript Scroll家族以及封装
JavaScript Scroll家族以及封装 scrollTop & scrollLeft 别卷去的值,就是当滑动滚轮浏览网页的时候,网页隐藏在屏幕上方或左侧的距离 获得scrollTop ...