洛谷——P1126 机器人搬重物
P1126 机器人搬重物
题目描述
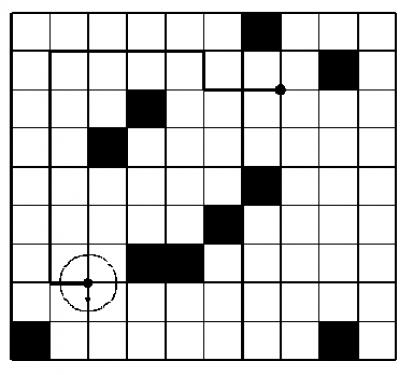
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径1.6米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个N*M的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:向前移动1步(Creep);向前移动2步(Walk);向前移动3步(Run);向左转(Left);向右转(Right)。每个指令所需要的时间为1秒。请你计算一下机器人完成任务所需的最少时间。
输入输出格式
输入格式:
输入的第一行为两个正整数N,M(N,M<=50),下面N行是储藏室的构造,0表示无障碍,1表示有障碍,数字之间用一个空格隔开。接着一行有四个整数和一个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东E,南S,西W,北N),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式:
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出-1。
输入输出样例
9 10 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 0 7 2 2 7 S
#include<queue>
#include<cstdio>
#include<cstring>
#include<iostream>
#include<algorithm>
#define N 100
using namespace std;
char ch;
];
int n,m,d,sx,sy,ex,ey,dis[N][N];
][]={{,,},{-,-,-},{,,},{,,}};
][]={{-,-,-},{,,},{,,},{,,}};
int read()
{
,f=; char ch=getchar();
') ch=getchar();
+ch-',ch=getchar();
return x*f;
}
struct Que
{
int x,y,d,step;
}que;
queue<Que>q;
int main()
{
n=read(),m=read();
;i<=n;i++)
;j<=m;j++)
{
vis[i][j]=read();
if(vis[i][j])
vis[i-][j]=vis[i-][j-]=vis[i][j-]=true;
}
sx=read(),sy=read();
ex=read(),ey=read();
cin>>ch;vis[sx][sy]=;
;
;
;
;
que.x=sx,que.y=sy;
dis[sx][sy]=que.step=;
vist[sx][sy][que.d]=true;
q.push(que);
while(!q.empty())
{
Que p=q.front();q.pop();
;}
;i<;i++)
{
int x=p.x+xx[p.d][i],y=p.y+yy[p.d][i];
||y<||x>=n||y>=m||vis[x][y]) break;
if(vist[x][y][p.d]) continue;
vist[x][y][p.d]=true;
que.x=x,que.y=y,que.d=p.d,que.step=p.step+;
q.push(que);
}
que.x=p.x,que.y=p.y,que.d=p.d+,que.step=p.step+;
==) que.d=;
if(!vist[que.x][que.y][que.d]) vist[que.x][que.y][que.d]=true,q.push(que);
que.x=p.x,que.y=p.y,que.d=p.d-,que.step=p.step+;
==-) que.d=;
if(!vist[que.x][que.y][que.d])
vist[p.x][p.y][p.d]=true,q.push(que);
}
printf("-1");
;
}
洛谷——P1126 机器人搬重物的更多相关文章
- 洛谷P1126 机器人搬重物
洛谷1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格, ...
- 洛谷 P1126 机器人搬重物 (BFS)
题目链接:https://www.luogu.org/problemnew/show/P1126 吐槽:这题很阴险 一开始没把格子图转化成点图:30分 转化成点图,发现样例过不去,原来每步要判断vis ...
- 洛谷P1126 机器人搬重物【bfs】
题目链接:https://www.luogu.org/problemnew/show/P1126 题意: 给定一个n*m的方格,机器人推着直径是1.6的球在格子的线上运动. 每一秒钟可以向左转,向右转 ...
- 洛谷P1126机器人搬重物[BFS]
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
- 洛谷 P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径 $1.6 米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个 N×MN \times MN×M ...
- 洛谷—— P1126 机器人搬重物
https://www.luogu.org/problem/show?pid=1126 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机 ...
- luogu P1126 机器人搬重物 题解
luogu P1126 机器人搬重物 题解 题目描述 机器人移动学会(\(RMI\))现在正尝试用机器人搬运物品.机器人的形状是一个直径\(1.6\)米的球.在试验阶段,机器人被用于在一个储藏室中搬运 ...
- P1126 机器人搬重物
P1126 机器人搬重物 题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有 ...
- luogu P1126 机器人搬重物
题目描述 机器人移动学会(RMI)现在正尝试用机器人搬运物品.机器人的形状是一个直径1.6米的球.在试验阶段,机器人被用于在一个储藏室中搬运货物.储藏室是一个N*M的网格,有些格子为不可移动的障碍.机 ...
随机推荐
- python模块之shutil和zipfile
shutil 模块 高级的 文件.文件夹.压缩包 处理模块 shutil.copyfileobj(fsrc, fdst[, length])将文件内容拷贝到另一个文件中 import shutil s ...
- JAVA基础篇—抽象类,抽象方法
class Shape package com.shape; public abstract class Shape { double area;// double per;// String col ...
- RSS列表
博客园 http://feed.cnblogs.com/blog/sitehome/rss
- 使用docker+tomcat部署jenkins
- Ubuntu关机与重启的相关指令
将数据同步写入到磁盘中的指令:sync 惯用的关机指令:shutdown 重新启动,关机:reboot,halt,poweroff shutdown可完成如下工作: 1.可以自由选择关机模式:是要关机 ...
- dubbo基础文档
随着互联网的发展,网站应用的规模不断扩大,常规的垂直应用架构已无法应对,分布式服务架构以及流动计算架构势在必行,亟需一个治理系统确保架构有条不紊的演进. 单一应用架构 当网站流量很小时,只需一个应用, ...
- 大数据学习——KETTLE入门学习——kettle安装
https://blog.csdn.net/u012637358/article/details/82593492 下载的kettle是汉化的 改成英文的 工具——选项——选择英文
- python-网络编程-02
[1] server端 首先我们看下一个最简单http服务端 import socket def handle_request(client): buf = client.recv(1024) cli ...
- maya 2014帮助手册中 三维概念讲解
maya 2014 帮助手册中 三维概念讲解 多边形简介 三个或更多的边, 顶点 边 面 组成 经常使用三边形或四边形来建模 n边形不常用 单个多边形称为面 多个面连接到 ...
- GloVe词分布式表示
GloVe 模型介绍 下面的内容主要来自https://blog.csdn.net/u014665013/article/details/79642083 GloVe的推导 GloVe是基于共现信息来 ...