PID控制原理和算法
闭环控制是根据控制对象输出反馈来进行校正的控制方式,它是在测量出实际与计划发生偏差时,按定额或标准来进行纠正的。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上。提到闭环控制算法,不得不提PID,它是闭环控制算法中最简单的一种。PID是比例 (Proportion) 积分 ,(Integral) 微分 ,(Differential coefficient) 的缩写,分别代表了三种控制算法。通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态。如下图所示为PID的流程。

其中r(t)表示给定输入值,c(t)表示实际输出值,e(t)表示信号偏差量,u(t)表示修正量。
1、比例(P)、积分(I)、微分(D)控制算法各有作用
1)、比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;比例控制的比例系数如果太小,即调节后的电位器转角与位置L的差值太小,调节的力度不够,使系统输出量变化缓慢,调节所需的总时间过长。比例系数如果过大,即调节后电位器转角与位置L的差值过大,调节力度太强,将造成调节过头,甚至使温度忽高忽低,来回震荡。增大比例系数使系统反应灵敏,调节速度加快,并且可以减小稳态误差。但是比例系数过大会使超调量增大,振荡次数增加,调节时间加长,动态性能变坏,比例系数太大甚至会使闭环系统不稳定。 单纯的比例控制很难保证调节得恰到好处,完全消除误差。如下图所示:


2)、积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;积分调节的“大方向”是正确的,积分项有减小误差的作用。一直要到系统处于稳定状态,这时误差恒为零,比例部分和微分部分均为零,积分部分才不再变化,并且刚好等于稳态时需要的控制器的输出值,对应于上述温度控制系统中电位器转角的位置L。因此积分部分的作用是消除稳态误差,提高控制精度,积分作用一般是必须的。 如下图所示:

3)、微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是分对噪声干扰有放大作用,加强微分对系统抗干扰不利。误差的微分就是误差的变化速率,误差变化越快,其微分绝对值越大。误差增大时,其微分为正;误差减小时,其微分为负。控制器输出量的微分部分与误差的微分成正比,反映了被控量变化的趋势。如下图所示:


闭环控制系统的振荡甚至不稳定的根本原因在于有较大的滞后因素。因为微分项能预测误差变化的趋势,这种“超前”的作用可以抵消滞后因素的影响。适当的微分控制作用可以使超调量减小,增加系统的稳定性。
对于有较大的滞后特性的被控对象,如果PI控制的效果不理想,可以考虑增加微分控制,以改善系统在调节过程中的动态特性。如果将微分时间设置为0,微分部分将不起作用。
微分时间与微分作用的强弱成正比,微分时间越大,微分作用越强。如果微分时间太大,在误差快速变化时,响应曲线上可能会出现“毛刺”。
微分控制的缺点是对干扰噪声敏感,使系统抑制干扰的能力降低。为此可在微分部分增加惯性滤波环节。
一种PID控制算法的流程图,如下所示:

2、PID参数调节
在整定PID控制器参数时,可以根据控制器的参数与系统动态性能和稳态性能之间的定性关系,用实验的方法来调节控制器的参数。有经验的调试人员一般可以较快地得到较为满意的调试结果。在调试中最重要的问题是在系统性能不能令人满意时,知道应该调节哪一个参数,该参数应该增大还是减小。
为了减少需要整定的参数,首先可以采用PI控制器。为了保证系统的安全,在调试开始时应设置比较保守的参数,例如比例系数不要太大,积分时间不要太小,以避免出现系统不稳定或超调量过大的异常情况。给出一个阶跃给定信号,根据被控量的输出波形可以获得系统性能的信息,例如超调量和调节时间。应根据PID参数与系统性能的关系,反复调节PID的参数。
如果阶跃响应的超调量太大,经过多次振荡才能稳定或者根本不稳定,应减小比例系数、增大积分时间。如果阶跃响应没有超调量,但是被控量上升过于缓慢,过渡过程时间太长,应按相反的方向调整参数。
如果消除误差的速度较慢,可以适当减小积分时间,增强积分作用。
反复调节比例系数和积分时间,如果超调量仍然较大,可以加入微分控制,微分时间从0逐渐增大,反复调节控制器的比例、积分和微分部分的参数。
总之,PID参数的调试是一个综合的、各参数互相影响的过程,实际调试过程中的多次尝试是非常重要的,也是必须的。
常用的控制方式:P,PI,PD,PID控制算法
注:以上原理部分内容参考自以下资料:
[2]. PID控制算法
3、代码实现
以对常数和函数控制为例,Maltab实现演示,代码如下:
clear all;
close all;
ts=0.001;
sys=tf(,[0.125,, ]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
u_1=0.0;u_2=0.0;
y_1=0.0;y_2=0.0;
x=[,,]';
error_1=;
error_2=;
for k=::
time(k)=k*ts;
S=;
if S==
kp=;ki=0.1;kd=;
rin(k)=; %Step Signal
elseif S==
%kp=;ki=0.0;kd=; %Sine Signal
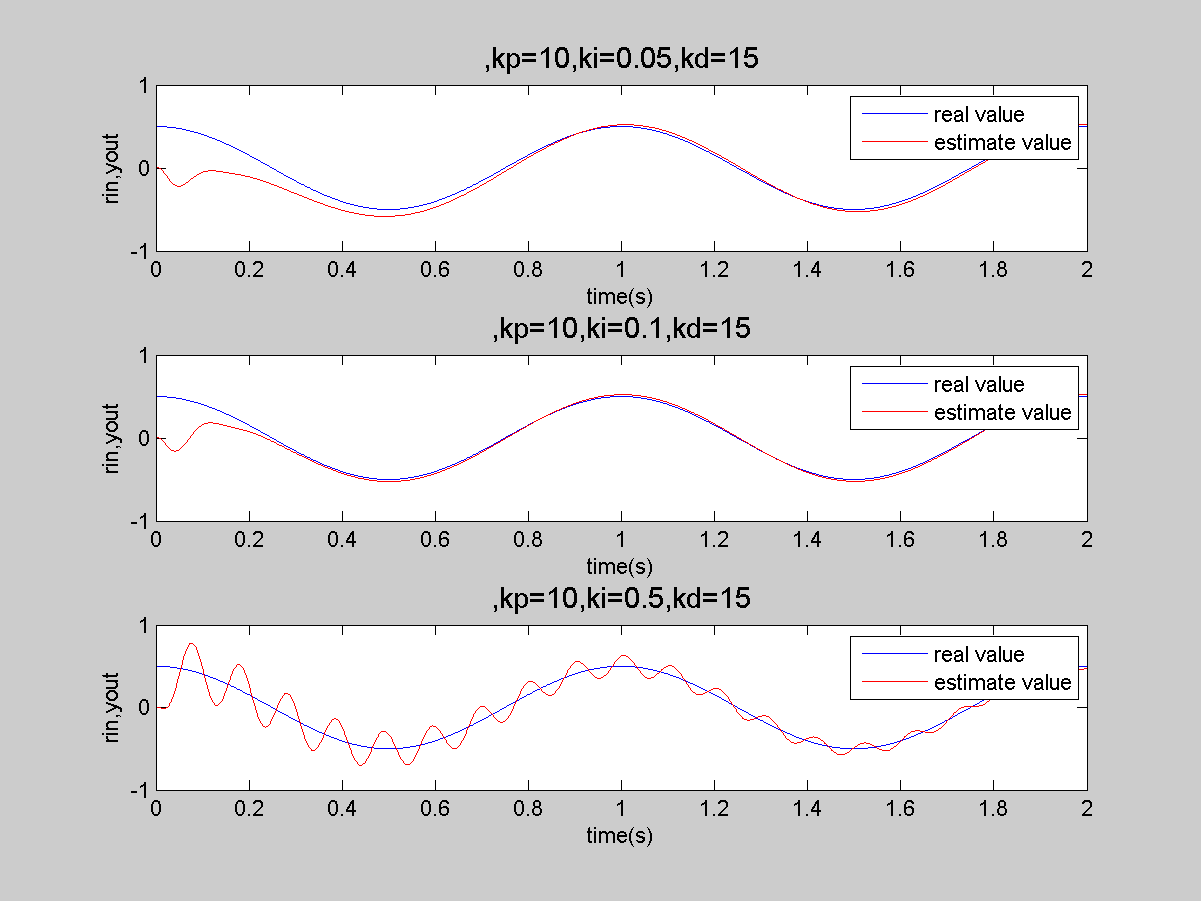
kp=;ki=0.1;kd=; %Sine Signal
rin(k)=0.5*cos(*pi*k*ts);
end
du(k)=kp*x()+kd*x()+ki*x(); %PID Controller
u(k)=u_1+du(k);
%Restricting the output of controller
if u(k)>=
u(k)=;
end
if u(k)<=-
u(k)=-;
end
%Linear model
yout(k)=-den()*y_1-den()*y_2+num()*u_1+num()*u_2;
error(k)=rin(k)-yout(k);
%Return of parameters
u_2=u_1;u_1=u(k);
y_2=y_1;y_1=yout(k);
x()=error(k)-error_1; %Calculating P
x()=error(k)-*error_1+error_2; %Calculating D
x()=error(k); %Calculating I
error_2=error_1;
error_1=error(k);
end
figure();
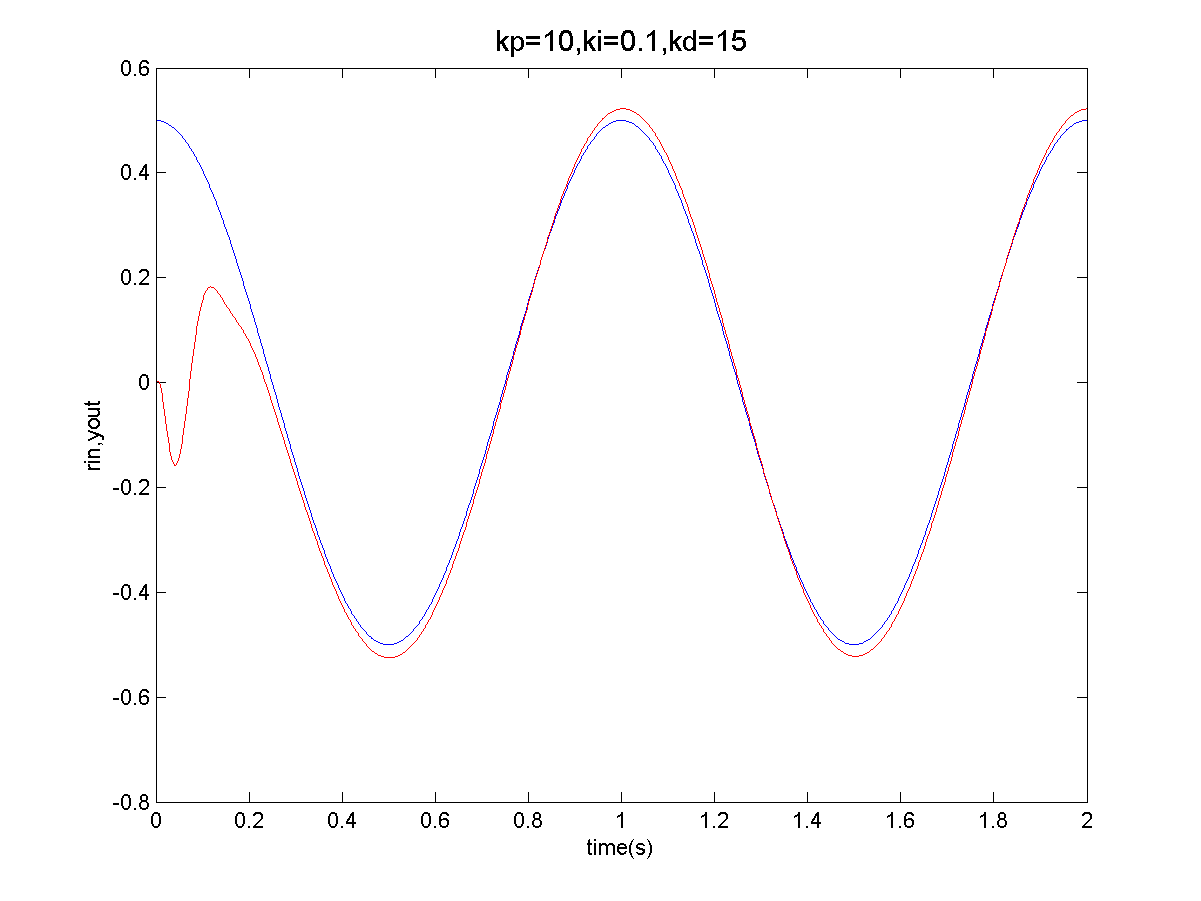
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)'),ylabel('rin,yout');
title(['kp=10,ki=0.1,kd=15'],'FontSize',,'Color','k');
saveas(,'pid','png');
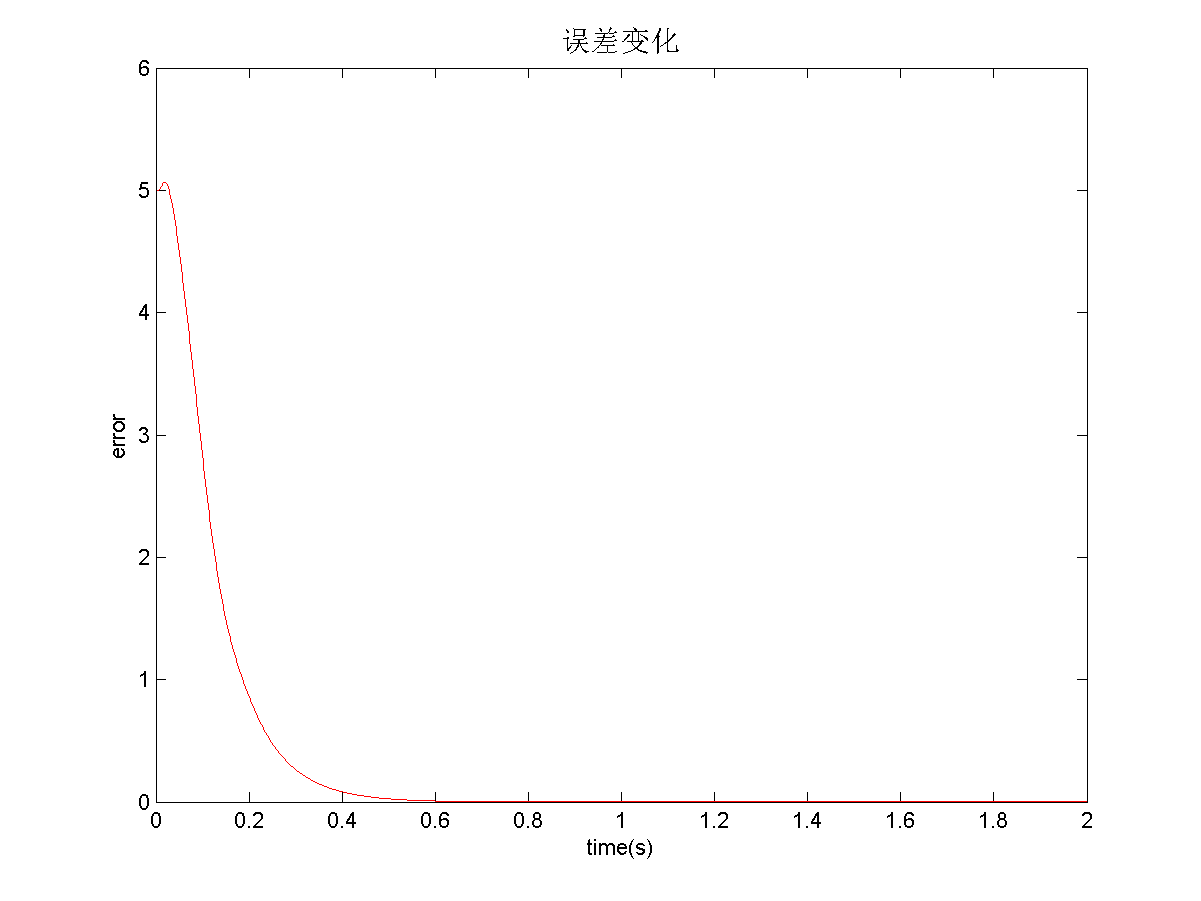
figure();
plot(time,error,'r')
title(['误差变化'],'FontSize',,'Color','k');
xlabel('time(s)');ylabel('error');
saveas(,'pid_err','png');
效果图
1)、常数y = 5纠正:

2)、曲线y = 0.5*cos(t)纠正:

代码工程下载:PID算法实现
PID控制原理和算法的更多相关文章
- T12焊台控制器制作教程 | T12烙铁 | PID增量式算法恒温控制 | 运算放大器-热电偶电压采集 | OLED屏幕显示-SPI通信 | 旋转编码器EC11用户操作
前言 购买T12烙铁的相关配件已经1年多了,期间也尝试了一些开源的T12控制器,但都没有成功,要么是配套资料少,要么是英文的,其中51和arduino的居多,STM32的较少.求人不如求己,索性自己开 ...
- 一、PID控制原理
在模拟控制系统中,控制器最常用的控制规律是PID控制.模拟PID控制系统原理框图如下图.系统由模拟PID控制器和被控对象组成. PID控制器是一种线性控制器,它根据给定值Yd(t)与实际输出值Y(t) ...
- PID控制算法的C语言实现一 PID算法原理
本系列是转载............. 全部的程序有一个共同点:就是我没认真去调pid的参数 在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,如果能够熟练掌握PID算法的设 ...
- 某科学的PID算法学习笔记
最近,在某社团的要求下,自学了PID算法.学完后,深切地感受到PID算法之强大.PID算法应用广泛,比如加热器.平衡车.无人机等等,是自动控制理论中比较容易理解但十分重要的算法. 下面是博主学习过程中 ...
- PID算法的C语言实现
1.根据我控制算法类文章中关于PID的理论的一些描述,同时也根据网络上一些其他的PID文章,以及自己最近一个项目的实践后,总结了几套基于C语言的PID算法,由于网络中很少有人进行分享完整的PID算法实 ...
- 经典PID控制及应用体会总结
经典PID控制及应用体会总结 PID控制原理 PID是一种线性控制器,它根据给定值rin(t)与实际输出值yout(t)构成控制方案: 重点关注相关算法是如何对偏差进行处理的: PID控制器各校正环节 ...
- 最长回文子串(Manacher算法)
回文字符串,想必大家不会不熟悉吧? 回文串会求的吧?暴力一遍O(n^2)很简单,但当字符长度很长时便会TLE,简单,hash+二分搞定,其复杂度约为O(nlogn), 而Manacher算法能够在线性 ...
- 增量与位置PID
转载:http://blog.sina.com.cn/s/blog_408540af0100b17n.html http://bbs.ednchina.com/BLOG_ARTICLE_211739. ...
- 数字PID控制算法
增量式PID控制算法 量式PID控制算法 2009-07-18 10:33 (转载 出处blog.ednchina.com/tengjingshu )blog.ednchina.com/tengjin ...
随机推荐
- 多线程中的超时, 如Socket超时
; ,,, ->$port { print "-->$port\r"; #say "\r"; await Promise.anyof( Promis ...
- Tutorial 1: Serialization
转载自:http://www.django-rest-framework.org/tutorial/1-serialization/#tutorial-1-serialization Tutorial ...
- 13.Python3标准库--互联网
(一)urllib.parse:分解url urllib.parse模块提供了一些函数,可以管理URL以及组成部分 1.解析 from urllib.parse import urlparse ''' ...
- spring源码分析---IOC(1)
我们都知道spring有2个最重要的概念,IOC(控制反转)和AOP(依赖注入).今天我就分享一下spring源码的IOC. IOC的定义:直观的来说,就是由spring来负责控制对象的生命周期和对象 ...
- 图像显著性论文(一)—A Model of saliency Based Visual Attention for Rapid Scene Analysis
这篇文章是图像显著性领域最具代表性的文章,是在1998年Itti等人提出来的,到目前为止引用的次数超过了5000,是多么可怕的数字,在它的基础上发展起来的有关图像显著性论文更是数不胜数,论文的提出主要 ...
- Median of Two Sorted Arrays——算法课上经典的二分和分治算法
There are two sorted arrays nums1 and nums2 of size m and n respectively. Find the median of the two ...
- explicit浅谈
在C++中,explicit关键字主要用于防止隐式转换,用于修饰构造函数.复制构造函数. 例如有一个类: class A { public: A( int count ) : m_data( coun ...
- WordPress SMTP发送邮件插件:WP SMTP
对于一个网站而言,发送邮件的功能是必不可少的,现在的主机一般都支持发送邮件,但是不同的主机由于函数限制或者某些其他原因,可能造成没办法正常发送邮件.这时候,我们可能就要借助第三方SMTP发送邮件. 对 ...
- 4款Github泄漏敏感信息搜索工具简单比较
gitrob Ruby开发,支持通过postgresql数据库https://github.com/michenriksen/gitrob weakfilescan Python开发,多线程,猪猪侠开 ...
- Redis实战(六)
查询数据 1.使用Linq匹配关键字查询 using (var redisClient = RedisManager.GetClient()) { var user = redisClient.Get ...