使用VS Code编译Marlin固件
参考:https://marlinfw.org/docs/basics/install_platformio_vscode.html
前言
在阅读本文之前,您应该已经阅读了使用 PlatformIO 安装 Marlin。
VSCode中的PlatformIO插件:PlatformIO将 VSCode 变成了一个完整的 IDE,用于编译和开发 Marlin。
1.安装
1.1安装VSCode
访问设置 Visual Studio 代码页面,为您的特定平台下载并安装最新的 VSCode。
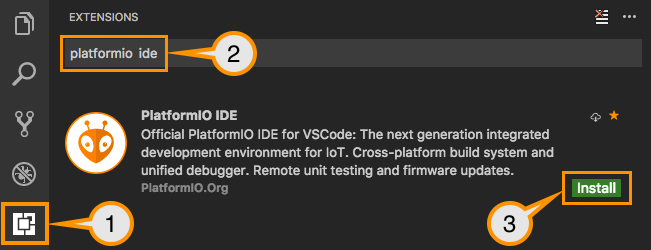
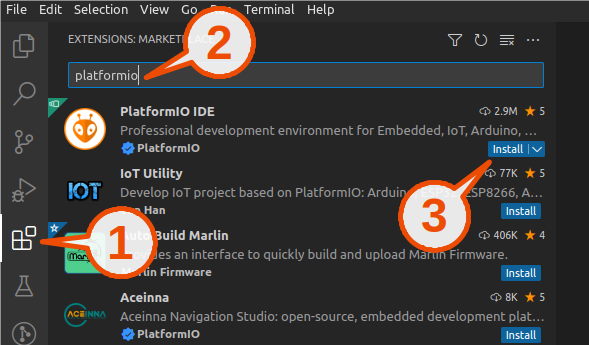
1.2安装 PlatformIO IDE
前往“获取 PlatformIO IDE ”页面了解如何在 VSCode 中安装 PlatformIO IDE。
(最快的上手方法是安装Auto Build Marlin,PlatformIO 也会随之安装。)
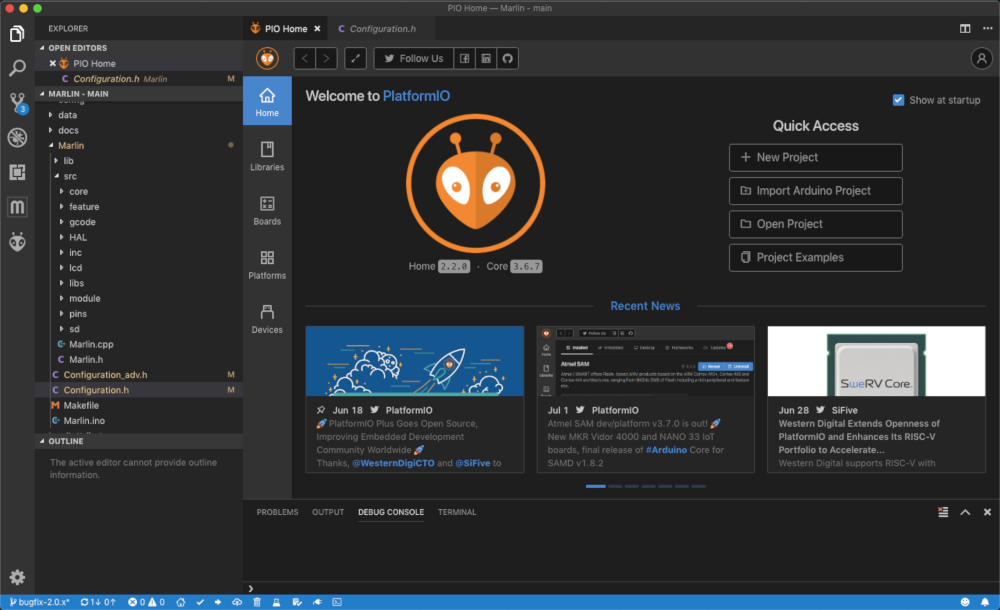
2.在 VSCode / PlatformIO 中打开 Marlin
您可以通过以下几种方式之一在Visual Studio Code中打开 Marlin :
- 将下载的 Marlin Firmware 文件夹拖到Visual Studio Code应用程序图标上,或
- 使用VSCode File菜单中的Open...命令,或
- 打开 PIO Home 选项卡,然后单击“ Open Project ”按钮。
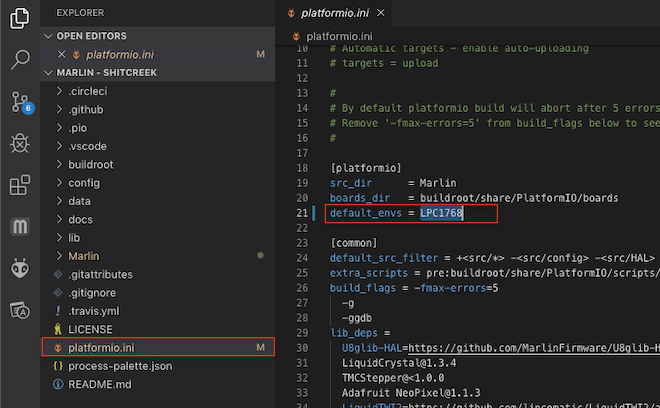
3.设置你的环境
为您的开发板手动设置环境:
打开文件platformio.ini并更改default_envs为您的开发板使用的环境。查看此文件以了解您的芯片的环境名称。例如,LPC1768芯片的环境名称显示为[env:LPC1768]. 省略外包装:[env:____].
当您单击PlatformIO按钮时,您将看到PROJECT TASKS包括Build和Upload。这些按钮将构建和上传您的默认环境。
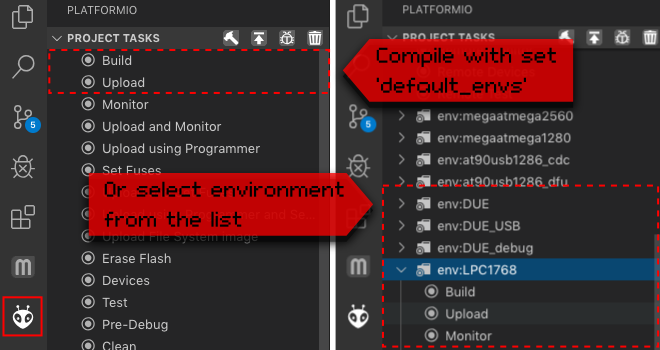
如果您不想设置,请从PlatformIO Project Tasks 列表default_envs中为您的开发板选择环境。
识别主板环境
主板所需的 PlatformIO 环境在pins.h文件中的主板注释中。在 Marlin 2.0 中,它位于子目录Marlin/src/pins/pins.h中。
例子:
Configuration.h 文件中有#define MOTHERBOARD BOARD_RAMPS_14_EFB
在pins.h文件中搜索RAMPS_14_EFB ,直到出现以下内容:
#elif MB(RAMPS_14_EEB)
#include "pins_RAMPS.h" // ATmega1280, ATmega2560 env:megaatmega1280 env:megaatmega2560
注释的第一部分列出了板上使用的 CPU。
env:xxxx 部分是用于此板的 PlatformIO 环境。
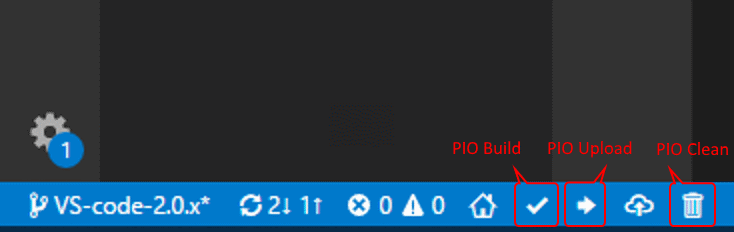
4. 启动构建、清理或上传任务
启动任务是通过PlatformIO 的 Project Tasks、底部状态栏图标或Auto Build Options完成的。
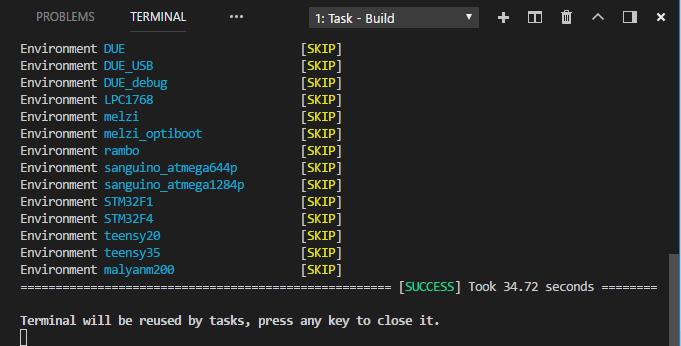
使用构建窗口比使用 PlatformIO 安装 Marlin中显示的要好一些。
- 面板可以调整大小。
- 控制台可以通过鼠标滚轮或滚动条滚动。
- 文本可以突出显示并复制到剪贴板。
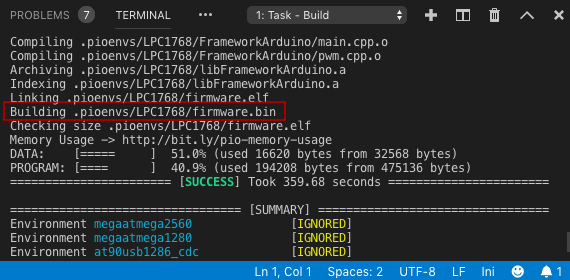
“firmware.bin”文件
一些较新的板需要将firmware.bin文件复制到板载 SD 卡上,然后您必须重新启动打印机才能完成安装。如果板子已连接并且您的 PC 可以看到 SD 卡,PlatformIO 将尝试自动复制文件,但这可能并不总是有效。在这些情况下,您需要找到firmware.bin文件并将其手动复制到 SD 卡。
使用VS Code编译Marlin固件的更多相关文章
- 转:小白编译openwrt固件教程
原文地址 编译openwrt固件并没有想象的那么复杂,我也是个小白,以下内容是我将网络上的编译教程稍微进行了一下整合.因为我发现很多编译教程没有说明如何更改flash相关配置. 安装ubuntu, ...
- 【转载】在Linux中使用VS Code编译调试C++项目
原文:在Linux中使用VS Code编译调试C++项目 最近项目需求,需要在Linux下开发C++相关项目,经过一番摸索,简单总结了一下如何通过VS Code进行编译调试的一些注意事项. 关于VS ...
- Ubuntu下安装并配置VS Code编译C++
作者:tongqingliu 转载请注明出处:http://www.cnblogs.com/liutongqing/p/7069091.html Ubuntu下安装并配置VS Code编译C++ 安装 ...
- 开发者说 | 使用Visual Studio Code编译、调试Apollo项目
转载地址:https://mp.weixin.qq.com/s?__biz=MzI1NjkxOTMyNQ==&mid=2247484266&idx=1&sn=d6bcd4842 ...
- 机械臂——arduino、marlin固件、printrun软件【转】
最近了解到,在市面上大多数机械臂控制都采用的arduino这个开源硬件来控制的,而我发现既然会单片机,就没有必要采用arduino来控制了,arduino只是一种为了简化编程而开发一种软硬件控制平台, ...
- 使用VS Code编译运行C/C++程序
使用VS Code编译运行C/C++程序 - qq_435248055的博客 - CSDN博客 https://blog.csdn.net/qq_31823267/article/details/78 ...
- Mac系统使用VS Code编译Bootstrap 4
环境: macOS 10.13.6 node.js 8.11.3 sass 1.10.3 bootstrap 4.1.3 vs code 1.25.1 Bootstrap3为我们提供了在线编译工具,可 ...
- debian下编译openwrt固件
参考文章:Ubuntu下编译OpenWRT固件 我买的路由器是RG100A-AA,采用了bcm63xx系列的芯片. 下载openwrt源码: svn co svn://svn.openwrt.org/ ...
- Marlin固件之—:基础入门与測试
一.Marlin的简介 Marlin固件是一个3D打印的开源固件,3D打印固件有很多,Marlin最为健全和强大,当然相对也会复杂一些.使用Gcode控制爱.Gcode是数控机床等工控控制使用范围较广 ...
随机推荐
- 《PHP程序员面试笔试宝典》——如果面试问题曾经遇见过,是否要告知面试官?
如何巧妙地回答面试官的问题? 本文摘自<PHP程序员面试笔试宝典> 面试中,大多数题目都不是凭空想象出来的,而是有章可循,只要求职者肯花时间,耐得住寂寞,复习得当,基本上在面试前都会见过相 ...
- 4、Linux基础--系统目录
笔记 1.晨考 1.移动文件的命令 mv 2.删除文件的命令及其参数 rm 参数: -r : 递归删除 -f : 不提示删除 -i : 提示删除 3.复制文件的命令及其参数 cp 参数: -r : 递 ...
- Solution -「ARC 104C」Fair Elevator
\(\mathcal{Description}\) Link. 数轴从 \(1\sim 2n\) 的整点上有 \(n\) 个闭区间.你只知道每个区间的部分信息(可能不知道左或右端点,或者都不知 ...
- 天啦,从Mongo到ClickHouse我到底经历了什么?
前言: 在实现前端监控系统的最初,使用了 Mongo 作为日志数据存储库.文档型存储,在日志字段扩展和收缩上都能非常方便.天生的 JSON 格式和 NodeJs 配合也非常贴合.就这样度过了几个月的蜜 ...
- ApplicationStartedEvent与ContextStartedEvent有区别吗?
大家好,我是DD! 今天跟大家聊聊这个问题:ApplicationStartedEvent与ContextStartedEvent有区别吗? 对了,最近花了几周时间,把SpringForAll社区 3 ...
- 企业如何建立一体化数据分析平台?还是得说说那几家BI工具
近年来,BI工具和报表工具犹如一股春风,吹遍了大江南北,成为了众多企业的发展利器,受到了企业决策者的拥戴.同时,在企业信息化需求日益旺盛的市场里也孕育了不少BI工具与报表工具厂商.商业智能的应用在国外 ...
- vs2019 NuGet安装及简单使用
Nuget介绍 官网定义:NuGet是.NET的软件包管理器(免费).NuGet客户端工具提供了生成和使用软件包的能力.NuGet Gallery 是所有软件包作者和消费者都使用的中央软件包存储库. ...
- 接口java.util.Map的四个实现类HashMap Hashtable LinkedHashMap TreeMap
java中HashMap,LinkedHashMap,TreeMap,HashTable的区别 :java为数据结构中的映射定义了一个接口java.util.Map;它有四个实现类,分别是HashMa ...
- Python:Excel
xlrd与xlwt:xls文件 如果不想看前半部分的基础知识,可以直接看最后的总结部分 1.两个模块 读xlrd 写xlwt import xlrd,xlwt 2.读 2.1 文件.表格信息的获取 打 ...
- qt(一)
一.Qt安装 qt离线安装地址:http://download.qt.io/archive/qt/ 参考教程:https://blog.csdn.net/u013934107/article/deta ...