LIS3DH三轴加速度计-实现欧拉角(俯仰角,横滚角)-转载
1. LIS3DH管脚定义

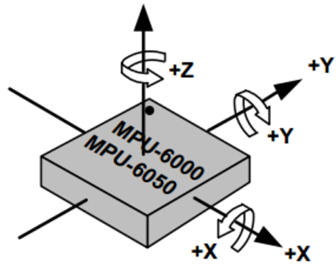
PS:LIS3DH和mpu6050的X和Y方向是相反的, mpu6050如下图所示:
2.LIS3DH加速度计介绍
由于LIS3DH只可以得到XYZ加速度,无法获取角速度,所以LIS3DH是无法测出偏航角(yaw).
3. LIS3DH之转换欧拉角介绍
3.1偏航角(yaw)
如下图所示,偏航角是指机头在水平面上的投影与地轴之间的夹角,以机头右偏为正.范围为[-180,180]

PS:由于LIS3DH无法测出,跳过.
3.2俯仰角(pitch)
如下图所示, 俯仰角是指机头与水平面的夹角,当飞机平行时则为0,抬头时则为正,范围为[-180,180]
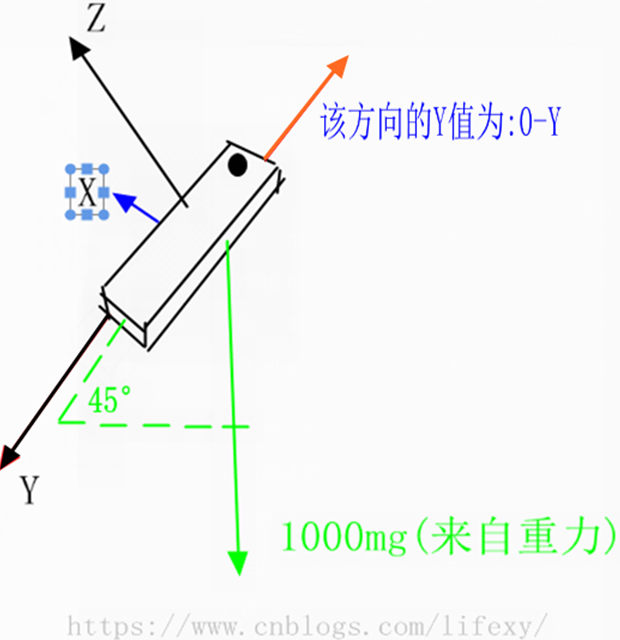
以45°为例,来解析LIS3DH
如下图所示:
转换为角度图为:
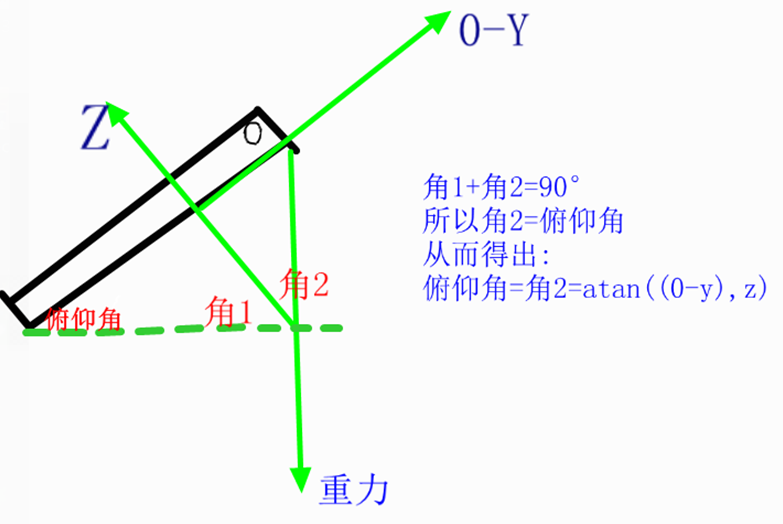
所以转换为角度为:
pitch = (short)(atan2((float)(0-y),z) * 180 / 3.14159); //转换为度数
3.3 横滚角(roll)
如下图所示, 横滚角指飞机两翼所在的平面与平行线之间的夹角,机体向右滚为正,范围为[-180,180].
横滚角和俯仰角类似,不过变成了X与Z轴之间比例了.
所以转换为角度为:
pitch = (short)(atan2((float)(0-y),z) * 180 / 3.14159); //转换为度数
4.初始化代码

unsigned char Lis3dh_init(void)
{
u8 val; unsigned char data; i2cInit(); data = 0x47;
if(i2cwrite(0x18, 0x20, 1, &data))return 1; //50HZ reg1 data = 0;
if(i2cwrite(0x18, 0x21, 1, &data))return 2; // reg2 data = 0x00;
if(i2cwrite(0x18, 0x22, 1, &data))return 3; // reg3 data = 0X00;
if(i2cwrite(0x18, 0x23, 1, &data))return 4; // +-2g reg4 data = 0x00;
if(i2cwrite(0x18, 0x24, 1, &data))return 5; // reg5 return 0;
}
设置为+2g量程,并且传感器刷新率为50hz,也就是说我们延时20ms左右去读一次传感器即可.
5.运行代码
void CalcXYZ(short x,short y,short z)
{
short pitch ,roll;
u16 maxG=0; pitch = (short)(atan2((float)(0-y),z) * 180 / 3.14159); //转换为度数
roll = (short)(atan2((float)(x),z) * 180 / 3.14159); //转换为度数 printf("x%03dmg y%03dmg z%03dmg pitch:%3d roll:%3d \r\n",x,y,z,pitch,roll);
} int main()
{
u8 i;
u8 buf[6];
short X,Y,Z; printf("Gsensor_init%d\r\n",Lis3dh_init()); while(1)
{
i2cread(0x18,0x27, 1,&i); //读取0x27,判断是否有数据
if((i&0x08))
{
for(i=0;i<6;i++)
i2cread(0x18,0X28+i, 1,&buf[i]); X = buf[1]*256+ buf[0]; Y = buf[3]*256 + buf[2]; Z = buf[5]*256 + buf[4]; X=(short)((float)(X)*4/65536*1000); Y=(short)((float)(Y)*4/65536*1000); Z=(short)((float)(Z)*4/65536*1000); CalcXYZ(X,Y,Z);
}
} }
6.打印截图
6.1当俯仰角pitch接近90°时
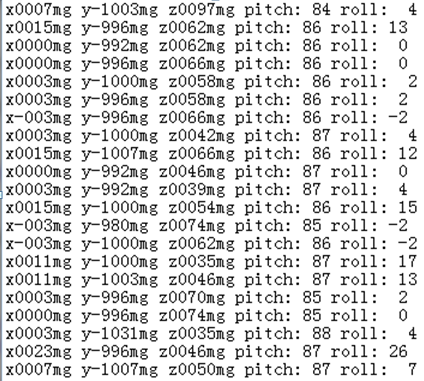
如上图可以看到,y是负的1000mg,这是因为它的y方向向下,所以计算俯仰角时,我们用的(0-y).
6.1当俯仰角pitch为0,翻滚角为45°时
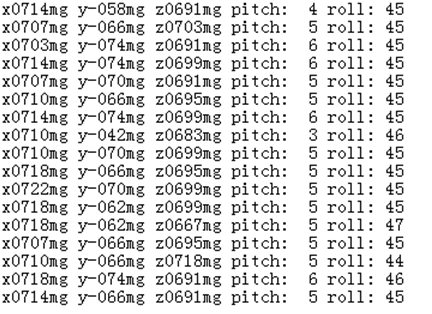
如上图可以看到X值为707左右,由于物体自重力为1000,所以707/1000,刚好对应sin45°(0.707)
LIS3DH三轴加速度计-实现欧拉角(俯仰角,横滚角)-转载的更多相关文章
- LIS3DH三轴加速度计-实现欧拉角(俯仰角,横滚角)
1. LIS3DH管脚定义 PS:LIS3DH和mpu6050的X和Y方向是相反的, mpu6050如下图所示: 2.LIS3DH加速度计介绍 由于LIS3DH只可以得到XYZ加速度,无法获取角速度, ...
- Arduino I2C + 三轴加速度计LIS3DH
LIS3DH是ST公司生产的MEMS三轴加速度计芯片,实现运动传感的功能.主要特性有: 宽工作电压范围:1.71 ~ 3.6V 功耗:低功耗模式2μA:正常工作模式.ODR = 50Hz时功耗11μA ...
- Arduino I2C + 三轴加速度计ADXL345
ADXL345是ADI公司生产的三轴数字加速度计芯片,与ST的LIS3DH功能接近.主要特性有: 工作电压:2.0 ~ 3.6V 功耗:待机功耗0.1μA:工作时与数据输出频率(ODR)有关,如ODR ...
- [每日电路图] 8、三轴加速度计LIS3DH电路图及功耗等指标
看TI的官网资料:http://www.st.com/web/en/catalog/sense_power/FM89/SC444/PF250725 一.初次接触关注的信息: 1.1.概述中的关键信息 ...
- [算法][三轴、六轴、九轴传感器算法分析] 1、分享一个三轴加速计matlab动态可视化脚本
一.有啥用 这里用的是LIS3DH三轴加速计,输出为X.Y.Z轴的加速度,通过串口连接电脑,电脑里运行matlab脚本通过串口实时获取数据并做可视化显示. 这里虽然是针对LIS3DH的,其实稍作修改即 ...
- 【雕爷学编程】Arduino动手做(48)---三轴ADXL345模块
37款传感器与模块的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止37种的.鉴于本人手头积累了一些传感器和模块,依照实践(动手试试)出真知的理念,以学习和交流为目的,这里准备 ...
- STC8H开发(七): I2C驱动MPU6050三轴加速度+三轴角速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- 三轴陀螺仪与加速度计如何辅助 iPhone 定位的
在所有之前解释一下陀螺仪 根据Wiki的定义:「陀螺仪是用于测量角度或维持方向的设备,基于角动量守恒原理.」 这句话的要点是测量角度或维持方向,这是 iPhone 4 为何搭载此类设备的原因.机械陀螺 ...
- STM32—驱动六轴MPU6050输出欧拉角
文章目录 一.MPU6050介绍 1.MPU6050与陀螺仪.加速度计的关系: 2.整体概括 3.引脚说明 4.基本配置及相关寄存器 电源管理寄存器1 陀螺仪配置寄存器 加速度计配置寄存器 FIFO使 ...
- STC8H开发(六): SPI驱动ADXL345三轴加速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
随机推荐
- linux发展史及软件配置
linux岗位需求 # 1.岗位需求 自动化运维,容器运维,DBA,IDC运维(不建议) ps:linux岗位会的越多给的越多 linux工作本质 linux简要发展史 # 1.发展 1991年,芬兰 ...
- pytorch学习笔记(6)--神经网络非线性激活
如果神经元的输出是输入的线性函数,而线性函数之间的嵌套任然会得到线性函数.如果不加非线性函数处理,那么最终得到的仍然是线性函数.所以需要在神经网络中引入非线性激活函数. 常见的非线性激活函数主要包括S ...
- 由浇花工具开始IOT物联网平台之开始前言篇【1】
在2020年时,突然有个想法,就是做个浇花工具,因为平时喜欢养花,有时忘记浇花,有时感觉手动浇花太麻烦,所以做个这个小玩意,是用.NET 开发的WinForm小程序,来控制单片机,带动水泵浇花,还可以 ...
- flutter 使用阿里iconfont图标库
1. 打开Iconnfont,选择自己想要的图标添加到购物车! 2,在右上角点开购物车选择下载代码. 3. 解压下载的代码压缩包,我们可以看到一个iconfont.ttf 4. 在项目根目录下创建一个 ...
- Python基础数据类型-list(列表)
a = [1, 2, 3] a.append([1, 4]) a.append(8) a.append([8, 9, '10']) # 添加的是整体,即:将输入对象添加到列表末尾 print(a) # ...
- Error running 'tm8': Cannot load C:\Users\Administrator\.IntelliJIdea2019.3\system\tomcat\Unnamed_jymes_3\conf\server.xml (系统找不到指定的文件。)
救命救命,由于脑壳被门夹了去更改了idea的配置,导致重启项目报错!又是给自己挖坑的一天,唉!!! 主要是看报错信息还一直以为是tomcat的问题,然后试了很多方法,比如查看配置的tomcat路径.重 ...
- phpExcel常用方法详解
phpExcel常用方法详解[附有php导出excel加超级链接] 发表于4年前(2012-07-20 12:57) 阅读(510) | 评论(0) 0人收藏此文章, 我要收藏 赞0 http://w ...
- Java 获取【.jar】文件里的资源文件
获取jar文件里的图片等文件时,会发现使用相对路径不行了. 因为打包后的jar文件,在获取路径时稍有不同. 下面是获取jar文件中图片的例子: 1 Resource[] resources = new ...
- 项目实训 DAY 13
GraphCore学习成本太高/现有资料太少,决定放弃 PlotNN用python语言生成pdf(需求:png),且不能通过仅运行python程序实现,python内生成的是tex格式,还需要加一行命 ...
- 使用 nvm 管理 node.js 版本
简介 在实际的前端开发过程中,可能会经常遇见 node.js 的版本问题,不同的项目需要使用不同的 node.js 版本. 直接安装的话,只能安装和使用 node.js 的一个版本.可以使用 nvm ...