OpenCV——仿射变换
什么是仿射变换?
一个任意的仿射变换都能表示为 乘以一个矩阵 (线性变换) 接着再 加上一个向量 (平移).
综上所述, 我们能够用仿射变换来表示:
- 旋转 (线性变换)
- 平移 (向量加)
- 缩放操作 (线性变换)
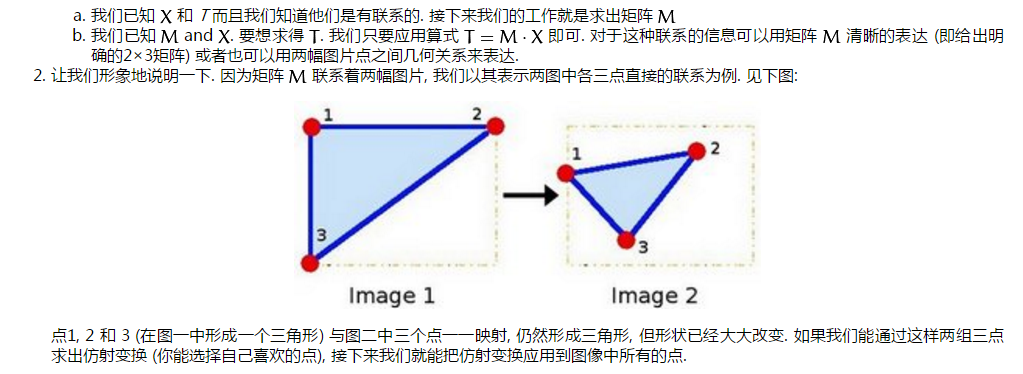
你现在可以知道, 事实上, 仿射变换代表的是两幅图之间的 关系 .
我们通常使用  矩阵来表示仿射变换.
矩阵来表示仿射变换.
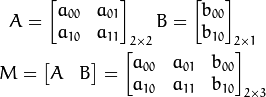
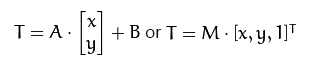
考虑到我们要使用矩阵  和
和  对二维向量
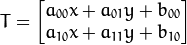
对二维向量  做变换, 所以也能表示为下列形式:
做变换, 所以也能表示为下列形式:
如何求怎样才能求得一个仿射变换?



实现代码:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h> using namespace cv;
using namespace std; /// 全局变量
char* source_window = "Source image";
char* warp_window = "Warp";
char* warp_rotate_window = "Warp + Rotate"; /** @function main */
int main(int argc, char** argv)
{
Point2f srcTri[3];
Point2f dstTri[3]; Mat rot_mat(2, 3, CV_32FC1);
Mat warp_mat(2, 3, CV_32FC1);
Mat src, warp_dst, warp_rotate_dst; /// 加载源图像
src = imread("E:\\VS2015Opencv\\vs2015\\project\\picture\\03.jpg", 1); /// 设置目标图像的大小和类型与源图像一致
warp_dst = Mat::zeros(src.rows, src.cols, src.type()); /// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1); dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);
dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);
dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7); /// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri); /// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size()); /** 对图像扭曲后再旋转 */ /// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / 2, warp_dst.rows / 2);
double angle = -50.0;
double scale = 0.6; /// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale); /// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size()); /// 显示结果
namedWindow(source_window, CV_WINDOW_AUTOSIZE);
imshow(source_window, src); namedWindow(warp_window, CV_WINDOW_AUTOSIZE);
imshow(warp_window, warp_dst); namedWindow(warp_rotate_window, CV_WINDOW_AUTOSIZE);
imshow(warp_rotate_window, warp_rotate_dst); /// 等待用户按任意按键退出程序
waitKey(0); return 0;
}
结果如下:

代码解析:
仿射变换: 正如上文所说, 我们需要源图像和目标图像上分别一一映射的三个点来定义仿射变换:
/// 设置源图像和目标图像上的三组点以计算仿射变换
srcTri[0] = Point2f(0, 0);
srcTri[1] = Point2f(src.cols - 1, 0);
srcTri[2] = Point2f(0, src.rows - 1); dstTri[0] = Point2f(src.cols*0.0, src.rows*0.33);
dstTri[1] = Point2f(src.cols*0.85, src.rows*0.25);
dstTri[2] = Point2f(src.cols*0.15, src.rows*0.7); /// 求得仿射变换
warp_mat = getAffineTransform(srcTri, dstTri);
我们获得了用以描述仿射变换的 矩阵 (在这里是 warp_mat)
将刚刚求得的仿射变换应用到源图像
warpAffine()函数有以下参数:
- src: 输入源图像
- warp_dst: 输出图像
- warp_mat: 仿射变换矩阵
- warp_dst.size(): 输出图像的尺寸
/// 对源图像应用上面求得的仿射变换
warpAffine(src, warp_dst, warp_mat, warp_dst.size());
旋转: 想要旋转一幅图像, 你需要两个参数:
- 旋转图像所要围绕的中心
- 旋转的角度. 在OpenCV中正角度是逆时针的
- 可选择: 缩放因子
我们通过下面的代码来定义这些参数:
再利用OpenCV函数 getRotationMatrix2D 来获得旋转矩阵, 这个函数返回一个 矩阵 (这里是 rot_mat)
最后把旋转应用到仿射变换的输出.
/// 计算绕图像中点顺时针旋转50度缩放因子为0.6的旋转矩阵
Point center = Point(warp_dst.cols / , warp_dst.rows / );
double angle = -50.0;
double scale = 0.6; /// 通过上面的旋转细节信息求得旋转矩阵
rot_mat = getRotationMatrix2D(center, angle, scale); /// 旋转已扭曲图像
warpAffine(warp_dst, warp_rotate_dst, rot_mat, warp_dst.size());
OpenCV——仿射变换的更多相关文章
- 【OpenCV新手教程之十八】OpenCV仿射变换 & SURF特征点描写叙述合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/33320997 作者:毛星云(浅墨) ...
- OpenCV仿射变换+投射变换+单应性矩阵
本来想用单应性求解小规模运动的物体的位移,但是后来发现即使是很微小的位移也会带来超级大的误差甚至错误求解,看起来这个方法各种行不通,还是要匹配知道深度了以后才能从三维仿射变换来入手了,纠结~ esti ...
- opencv 仿射变换 投射变换, 单应性矩阵
仿射 estimateRigidTransform():计算多个二维点对或者图像之间的最优仿射变换矩阵 (2行x3列),H可以是部分自由度,比如各向一致的切变. getAffineTransform( ...
- opencv 仿射变换
import cv2 as cv import numpy as np img = cv.imread('../images/face.jpg') h, w = img.shape[:2] mat_s ...
- 系列文章 -- OpenCV入门教程
<OpenCV3编程入门>内容简介&勘误&配套源代码下载 [OpenCV入门教程之十八]OpenCV仿射变换 & SURF特征点描述合辑 [OpenCV入门教程之 ...
- 目标检测之harr---角点检测harr 的opencv实现
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接: http://blog.csdn.net/poem_qianmo/article/details/29356187 作者:毛星云(浅墨) ...
- 【转】【opencv】仿射变换
仿射变换 目标 在这个教程中你将学习到如何: 使用OpenCV函数 warpAffine 来实现一些简单的重映射. 使用OpenCV函数 getRotationMatrix2D 来获得一个 旋转矩阵 ...
- opencv 用户文档 错误更正 仿射变换
今天在看opencv官方给出的仿射变换计算仿射变换矩阵的文档的时候,发现官方文档中有个很明显的错误,再次给大家提个醒. 官方文档连接: http://opencv.willowgarage.com/d ...
- opencv 图像仿射变换 计算仿射变换后对应特征点的新坐标 图像旋转、缩放、平移
常常需要最图像进行仿射变换,仿射变换后,我们可能需要将原来图像中的特征点坐标进行重新计算,获得原来图像中例如眼睛瞳孔坐标的新的位置,用于在新得到图像中继续利用瞳孔位置坐标. 仿射变换在:http:// ...
随机推荐
- HTML5表单验证(4个实用的表单美化案例)
multipart/form-data 在使用包含文件上传控件的表单时,必须使用autocomplete="on" 自动补全功能novalidate 不验证 <form en ...
- 在windows系统下,配置vue项目一键启动文件
我的项目由客户端.后台管理.数据库和服务器三部分组件,每次启动项目都要一个一个启动,挺麻烦的,现在写一个.bat文件来批处理命令. 这个是我的启动文件内容. 第一行运行的我wampServer服务器, ...
- openlayers按坐标点播放
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- commons-dbutils实现增删改查
1.maven依赖 <?xml version="1.0" encoding="UTF-8"?> <project xmlns="h ...
- 安装Docker到Ubuntu(APT)
运行环境 系统版本:Ubuntu 16.04.5 LTS 软件版本:Docker-CE-18.09.5 硬件配置:无 安装过程 1.卸载旧版本 root@ubuntu:~# sudo apt-get ...
- Win10如何设置休眠选项(关于睡眠、休眠、快速启动这几个伪关机功能如何设置更适合笔记本电脑?)
· Win10如何设置休眠选项(关于睡眠.休眠.快速启动这几个伪关机功能如何设置更适合笔记本电脑?) 应用场景 升级正式版win10以后,发现竟然没有休眠选项,从电源管理器里面也没有找到,有时候有些重 ...
- navicat连接mysql出现2059错误的解决方法
安装navicat之后新建连接出现了2059的错误 网上查询过后,发现这个错误出现的原因是在mysql8之前的版本中加密规则为mysql_native_password,而在mysql8以后的加密规则 ...
- 已知float后几位,谋几位保留
设变量n为float类型,m为int类型,则以下能实现将n中的数值保留小数点后两位,第三位进行四舍五入运算的表达式____. #include "common.h" #includ ...
- [Err] 1248 - Every derived table must have its own alias
问题描述 [Err] 1248 - Every derived table must have its own alias 问题原因 这句话的意思是说每个派生出来的表都必须有一个自己的别名 我的Mys ...
- 51nod1326 遥远的旅途(spfa+dp)
题意: 给出一个无向图,问从1到n是否存在一条长度为L的路径. n,m<=50,1<=路径长度<=10000,L<=10^18 思路: 改变一下思路,我们发现,假设从起点1走到 ...