机器人学 —— 机器人视觉(Bundle Adjustment)
今天完成了机器人视觉的所有课程以及作业,确实是受益匪浅啊!

最后一个话题是Bundle Adjustment. 机器人视觉学中,最顶尖的方法。
1、基于非线性优化的相机位姿估计
之前已经在拟合一篇中,已经补完了非线性最小二乘拟合问题。Bundle Adjustment,中文是光束平差法,就是利用非线性最小二乘法来求取相机位姿,三维点坐标。在仅给定相机内部矩阵的条件下,对四周物体进行高精度重建。Bundle Adjustment的优化目标依旧是最小重复投影误差。
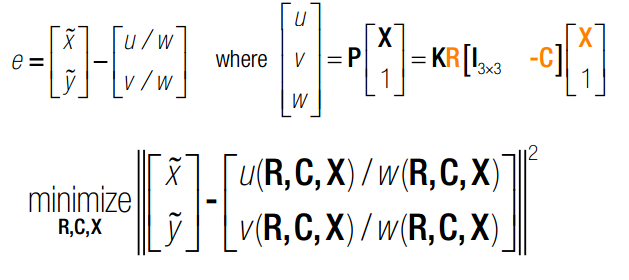
与利用non-linear mean square 解三角同,bundle adjustment 中所有的参数,RCX均为变量。N幅图则有N个位姿,X个点,我们会得到非常大的jacobbian Matrix.本质上,需要使用雅克比矩阵进行梯度下降搜索。详细见博客——拟合
2、雅克比矩阵
雅克比矩阵的行代表信息,列代表约束
每一行是一个点在该位姿下的误差,每一列代表f对x分量的偏导数。

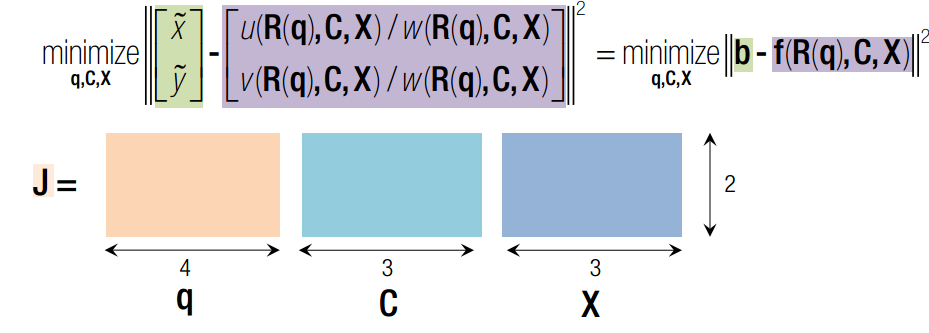
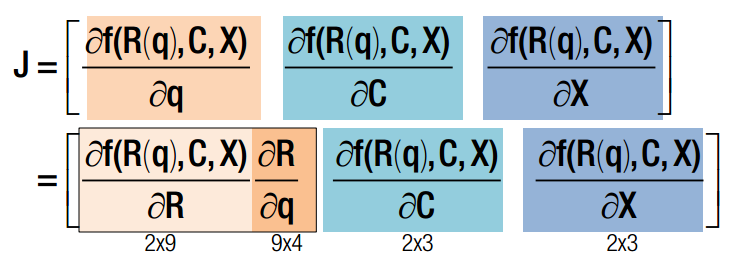
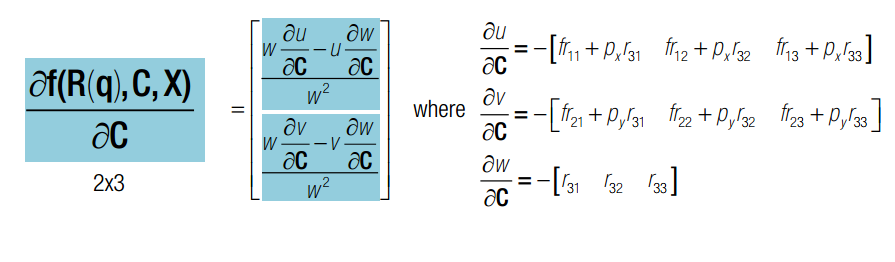
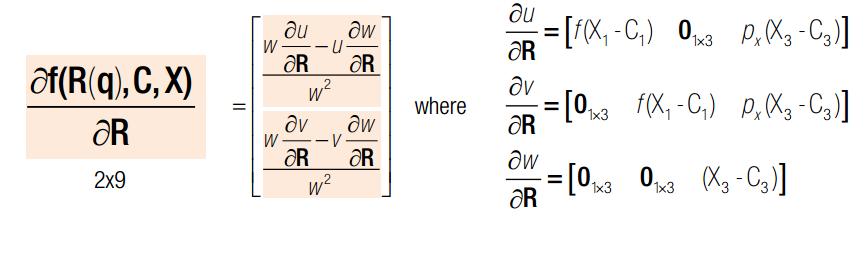
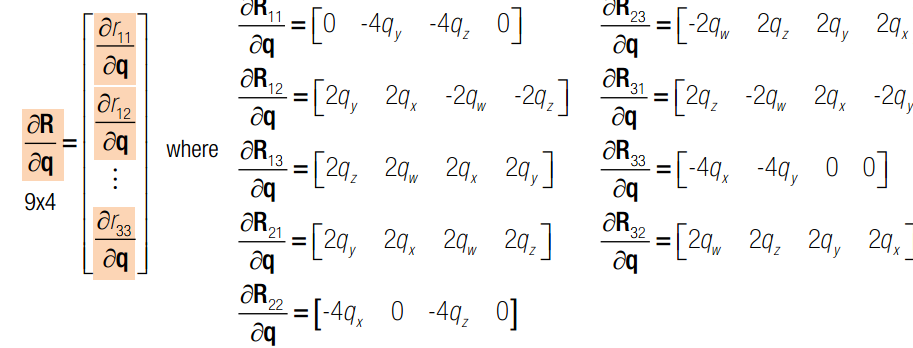
q x c 均为变量,q是旋转四元素,x 是三维点空间坐标,c 是相机光心在世界坐标系下的坐标。J 可以分为三部分,前4列代表对旋转求导,中间三列代表对c求导,最后三列代表对x求导。其中,对旋转求导又可以分解为对旋转矩阵求导X旋转矩阵对四元素q求导。一旦获得J的表达式,我们就可以使用Newton-Gaussian 迭代对x寻优了。求导后的数学表达式如下:

如果有两个相机,则总的雅克比矩阵如下:

通过同时迭代所有的q C X ,最终可以同时得到世界点坐标,相机位姿 == SLAM!!!
机器人学 —— 机器人视觉(Bundle Adjustment)的更多相关文章
- Bundle Adjustment光束平差法概述
http://blog.csdn.net/abcjennifer/article/details/7588865 http://blog.csdn.net/ximenchuixuezijin/arti ...
- 机器人学 —— 机器人感知(Gaussian Model)
机器人感知是UPNN机器人专项中的最后一门课程,其利用视觉方法来对环境进行感知.与之前提到的机器人视觉不同,机器人感知更侧重于对环境物体的识别与检测.与计算机视觉不同,机器人视觉所识别的物体往往不需要 ...
- bundle adjustment 玩具程序
结合 bundle adjustment原理(1) 和 Levenberg-Marquardt 的 MATLAB 代码 两篇博客的成果,调用MATLAB R2016a中 bundleAdjustmen ...
- bundle adjustment原理(1)
那些光束平差的工具,比如SBA.SSBA之类的虽然好,然而例子和教程都不够多且不够详细,让初学者难以上手. 要传入的参数虽然有解释,然而却也不是十分清楚其含义,具体要怎么生成,生成为什么形式. 我在折 ...
- bundle adjustment原理(1)转载
转自菠菜僵尸 http://www.cnblogs.com/shepherd2015/p/5848430.html bundle adjustment原理(1) 那些光束平差的工具,比如SBA.SSB ...
- 机器人学 —— 机器人感知(Kalman Filter)
对于机器人感知任务而言,经常需要预判物体的运动,保证机器人在物体与自身接触之前进行规避.比如无人机与障碍物的碰撞,足球机器人判断足球的位置.预判的前提是对当前状态进行准确的估计,比如足球的速度,障碍物 ...
- 机器人学 —— 机器人感知(Location)
终于完成了Robotic SLAM 所有的内容了.说实话,课程的内容比较一般,但是作业还是挺有挑战性的.最后一章的内容是 Location. Location 是 Mapping 的逆过程.在给定ma ...
- 机器人学 —— 机器人感知(Mapping)
对于移动机器人来说,最吸引人的莫过于SLAM,堪称Moving Robot 皇冠上的明珠.Perception 服务于 SLAM,Motion Plan基于SLAM.SLAM在移动机器人整个问题框架中 ...
- VIO的Bundle Adjustment推导
IMU模型和运动积分 $R_{\tiny{WB}} \left( t +\Delta{t} \right) = R_{\tiny{WB}} \left( t \right) Exp\left( \in ...
随机推荐
- Oracle系列教程
推荐博客:http://blog.csdn.net/leshami 具体知识点总结: 1.oracle安装:http://www.cnblogs.com/bluepoint2009/p/oracle- ...
- mongoDB 入门指南、示例
一.准备工作 1. 下载mongoDB 下载地址:http://www.mongodb.org/downloads 选择合适你的版本 相关文档:http://www.mongodb.org/displ ...
- Asp.net 导入Excel(服务器不带Office)
#region 把excel文件转换为DataSet. /// <summary> /// 把excel文件转换为DataSet. /// </summary> /// < ...
- GS连接事件
GS网络连接事件 //网络事件 //这个事件是在libevent里面的收到的事件就是在那个listen里面,就是客户端打开,服务器收到通知 link_stat stat = (link_stat)rP ...
- shader 的 nounroll
刚刚解决了一个特别坑的问题. 客户有个需求 需要shader里面 loop 的iterator数量 在运行时确定.z 这样对于里面存在 sample的loop就会被force unroll但因为co ...
- 研究AFIncrementalStore
一.增量存贮(AFIncrementalStore:NSIncrementalStore)在CoreData中所处位置
- ios 7 20像素解决
1.if ([[[UIDevicecurrentDevice] systemVersion] floatValue] >= 7) { self.view.bounds = CGRectMake( ...
- leetcode course shedule
题目就不说了,问题本质就是在一个有向图中查找它是不是存在环. 上网百度了一下,方法是,找出图中入度为0 的点,将以它为起点的边去掉. 重复这一动作,直到所有的边都被去掉(没有环)或者存在边但是无法再去 ...
- 2016年度 JavaScript 展望(上)
[编者按]本文作者为资深 Web 开发者 TJ VanToll, TJ 专注于移动端 Web 应用及其性能,是<jQuery UI 实践> 一书的作者. 本文系 OneAPM 工程师编译呈 ...
- 机器学习(一):梯度下降、神经网络、BP神经网络
这几天围绕论文A Neural Probability Language Model 看了一些周边资料,如神经网络.梯度下降算法,然后顺便又延伸温习了一下线性代数.概率论以及求导.总的来说,学到不少知 ...