ROS-Solidworks转URDF
前言:URDF建模很粗糙,而ros提供了支持sw转urdf的插件,可以使建模更精细化.
一、安装sw_urdf_exporter插件
sw_urdf_exporter插件网址:http://wiki.ros.org/sw_urdf_exporter
安装时关闭sw,一路默认安装就可以了.
二、SW转URDF
使用SW打开将要转化的零件图。
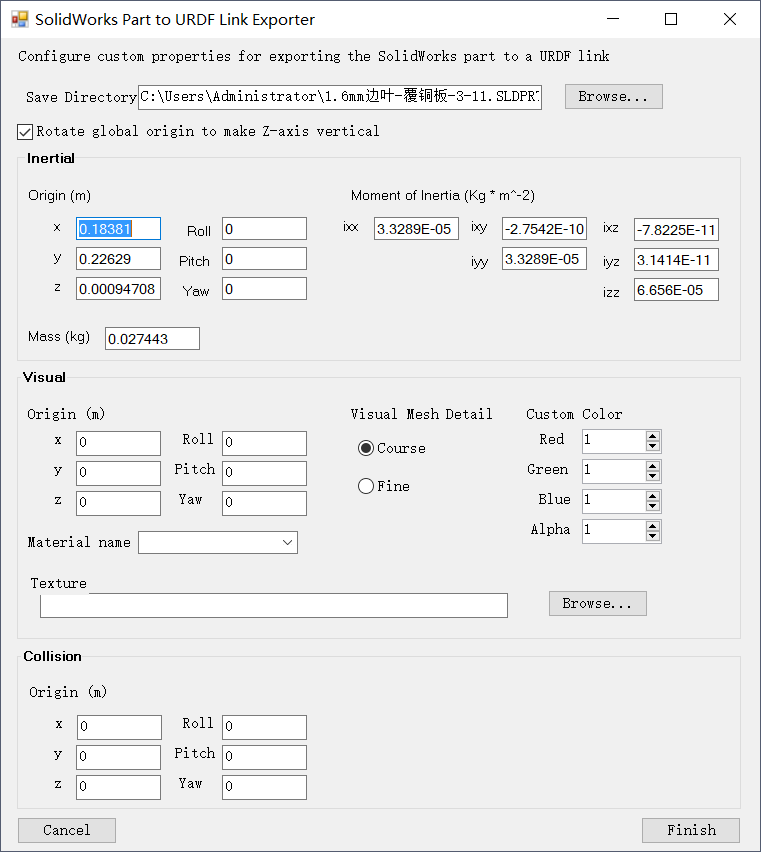
然后打开sw_urdf_exporter插件 
选择保存位置,名字使用英文小写命名,如part。点finish
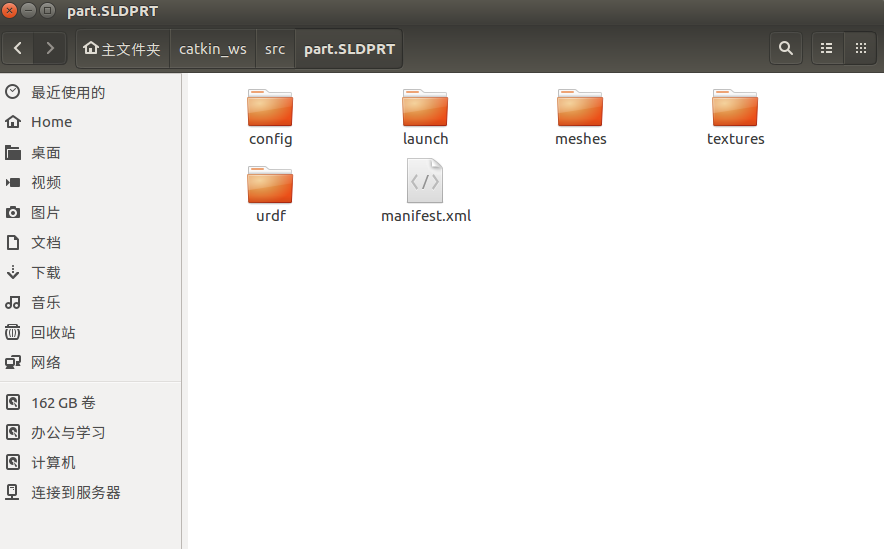
这时在保存路径上会生成功能包

三、修改文件
3.1 将part.SLDPRT功能包原封不动放在工作空间的src内
3.2 修改文件(装配体)
修改package.xml文件
<maintainer email="me2email.com" /> 修改为 <maintainer email="me2@email.com" />
修改两个launch文件
textfile="$(find my_paper_car)/robots/my_paper_car.urdf" /> 修改为 textfile="$(find my_paper_car)/urdf/my_paper_car.urdf" />
3.3 新建launch文件(单零件)
在launch文件夹下新建display.launch文件,内容如下:
<launch>
<param name="robot_description" textfile="$(find part.SLDPRT)/urdf/test.urdf" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find part.SLDPRT)/test.rviz" />
</launch>
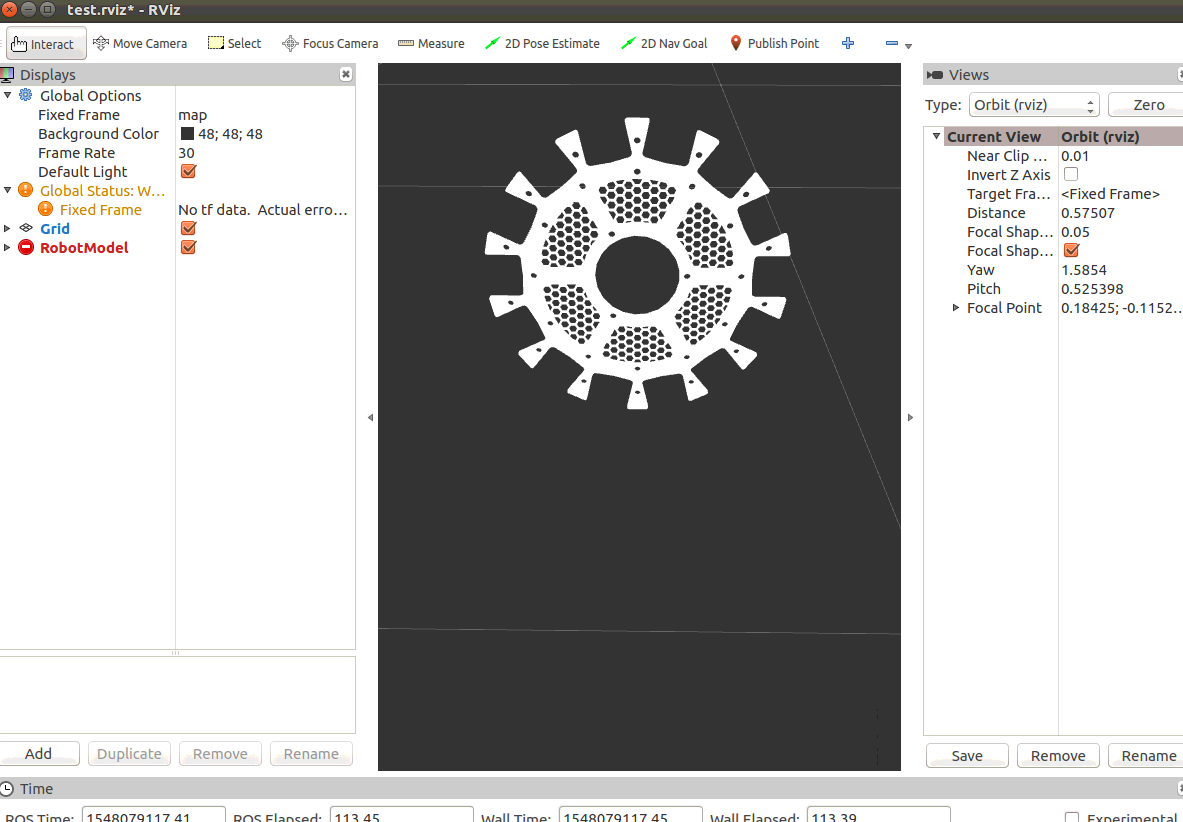
四、运行
启动dispaly.launch文件
并在rviz里add robomodel
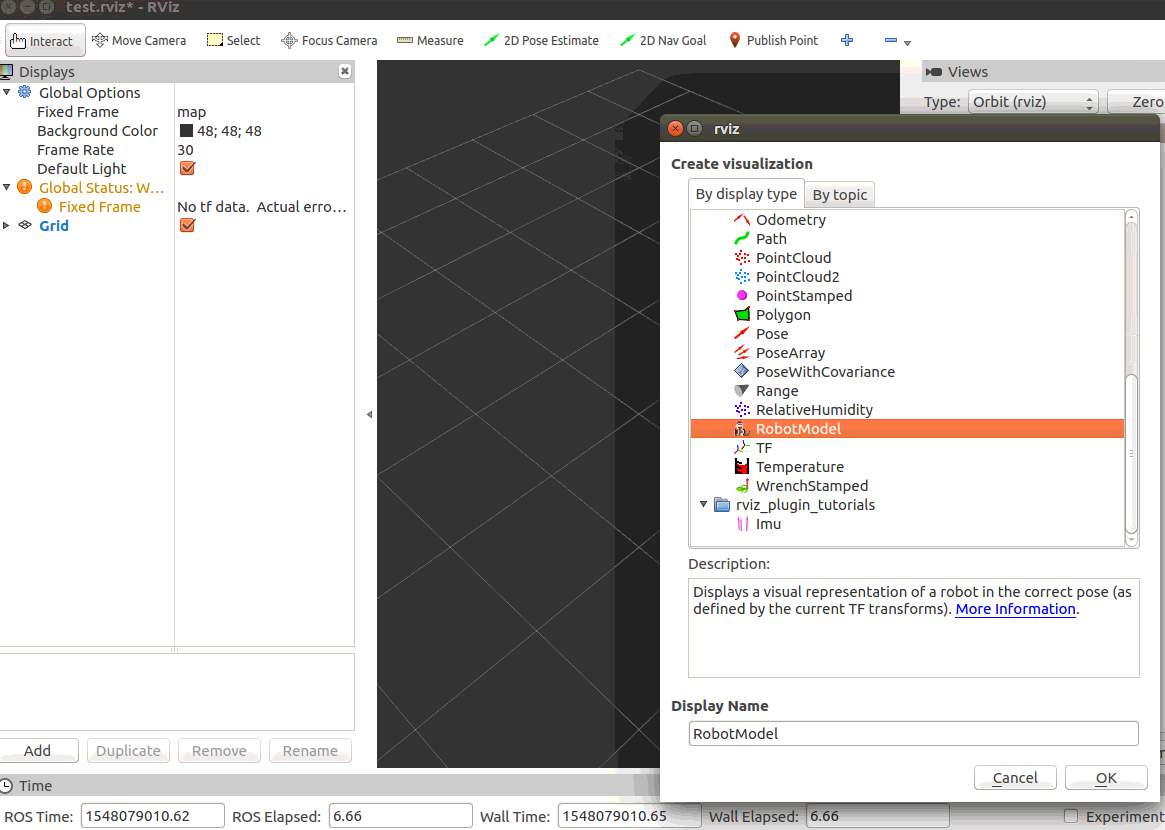
放大后效果如下:
-END-
ROS-Solidworks转URDF的更多相关文章
- Solidworks to Urdf to Sdf
. The urdf using tree form that does not support parallel robots (close loop robots). . The sdf usin ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS * 了解学习urdf的内容格式及编写
<?xml version="1.0" ?> 声明文件使用xml描述 <robot name="robot_name">定义这是一个机器 ...
- Solidworks 2016中导出URDF文件
安装SolidWorks to URDF exporter插件 下载SolidWorks to URDF Exporter插件后按照网站上的步骤进行安装(目前该插件已经在Win 7 64位系统+Sol ...
- urdf 学习记录
1.URDF(Unified Robot Description Format),统一的机器人描述文件格式.主要用来描述机器人的几何形状,在可视化时(如RViz中)显示出机器人的几何形状.与画图软件( ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- ROS_Kinetic_14 ROS工具roswtf的基本使用方法等
ROS_Kinetic_14 ROS工具roswtf的基本使用方法 官网教程:http://wiki.ros.org/cn/ROS/Tutorials/Getting%20started%20with ...
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- ROS探索总结(三)——ROS新手教程
转自古-月 http://blog.csdn.net/hcx25909 前面我们介绍了ROS的特点和结构,接下来就要开始准备动手感受一下ROS的强大了. ROS官网的wiki上针对新手的教程很详细,最 ...
- ROS学习笔记(三)
机器人建模与仿真URDF(Unified Robot Descrption Format,统一机器人描述格式),ROS提供了URDF的c++解析器.安装语法检查工具sudo apt-get insta ...
随机推荐
- Java 实时论坛 - Sym 1.3.0 发布
简介 Sym 是一个用 Java 写的实时论坛,欢迎来体验! 初衷 Sym 的诞生是有如下几点原因: 我们想实现一种新的网络社区体验,独立博客+社区互动 大多数论坛用户体验不够现代化,想做一个和聊 Q ...
- Android 使用WindowManager实现Android悬浮窗
WindowManager介绍 通过Context.getSystemService(Context.WINDOW_SERVICE)可以获得 WindowManager对象. 每一个WindowMan ...
- R 连接DB2数据库,并制作词图
#写在前面的话:此教程主要是用R连接了DB2数据库,并进行文本分析,制作了词图 #教程为markdown编写 ---title: "网站留言分析"output: html_docu ...
- 利用Axis2默认口令安全漏洞入侵WebService网站
近期,在黑吧安全网上关注了几则利用Axis2默认口令进行渗透测试的案例,大家的渗透思路基本一致,利用的技术工具也大致相同,我在总结这几则案例的基础之上进行了技术思路的拓展.黑吧安全网Axis2默认口令 ...
- Java语言基础(数组)
Java语言基础(数组概述和定义格式说明) A:为什么要有数组(容器) 为了存储同种数据类型的多个值 B:数组概念 数组是存储同一种数据类型多个元素的集合.也可以看成是一个容器. 数组既可以存储基本数 ...
- SQL 字段类型详解
bit 整型 bit数据类型是整型,其值只能是0.1或空值.这种数据类型用于存储只有两种可能值的数据,如Yes 或No.True 或False .On 或Off. 注意:很省空间的一种数据 ...
- Robot Framework(四)创建测试套件
2.3.1测试用例文件 Robot Framework测试用例是使用测试用例文件中的测试用例表创建的.这样的文件会自动从它包含的所有测试用例中创建一个测试套件.可以有多少测试用例没有上限,但建议少于1 ...
- 什么是J2EE的集群?
1. 前言 现在有越来越多的关键应用和大型应用是基于J2EE 来创建的,像银行系统和帐单系统这些关键应用要求有很高的可用性,而Google 和Yahoo 这样的大型应用就需要很好的可扩 ...
- java中后端拼接字符串返回前台页面换行显示
后端拼接时用:"\n"分割,比如: String str = "白日依山尽,\n" + "黄河入海流:"; 返回前台页面时,放入 <p ...
- Python——Day2(基础知识练习一)
1.执行Python脚本的两种方式1)调用解释器 Python +绝对路径+文件名称2)调用解释器 Python +相对路径+文件名称 2.简述位.字节的关系8位为1个字节 3.简述ASCII.uni ...