ROS-Solidworks转URDF
前言:URDF建模很粗糙,而ros提供了支持sw转urdf的插件,可以使建模更精细化.
一、安装sw_urdf_exporter插件
sw_urdf_exporter插件网址:http://wiki.ros.org/sw_urdf_exporter
安装时关闭sw,一路默认安装就可以了.
二、SW转URDF
使用SW打开将要转化的零件图。
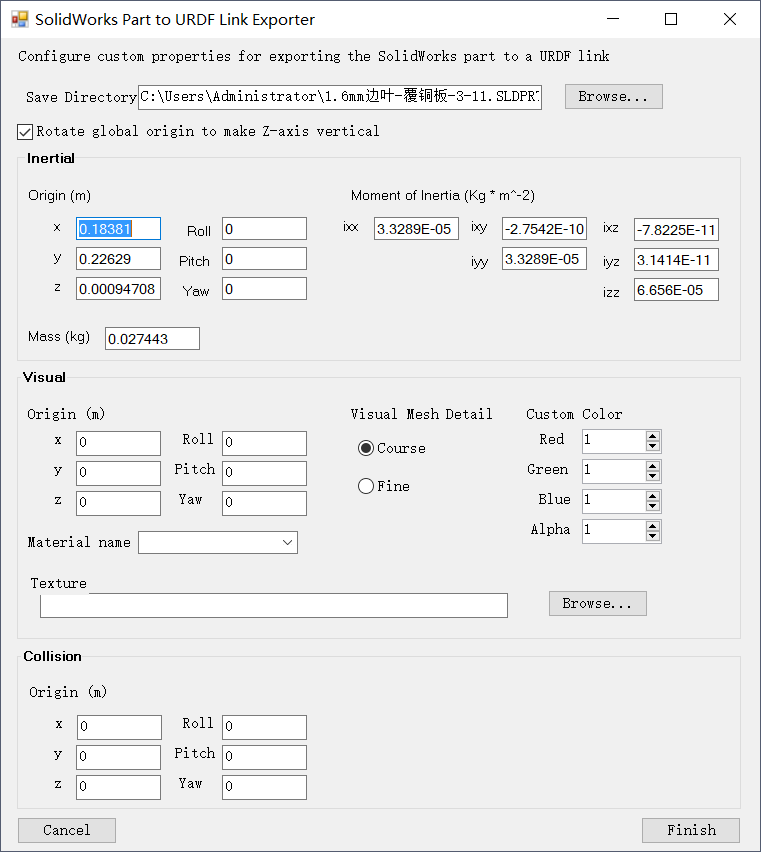
然后打开sw_urdf_exporter插件 
选择保存位置,名字使用英文小写命名,如part。点finish
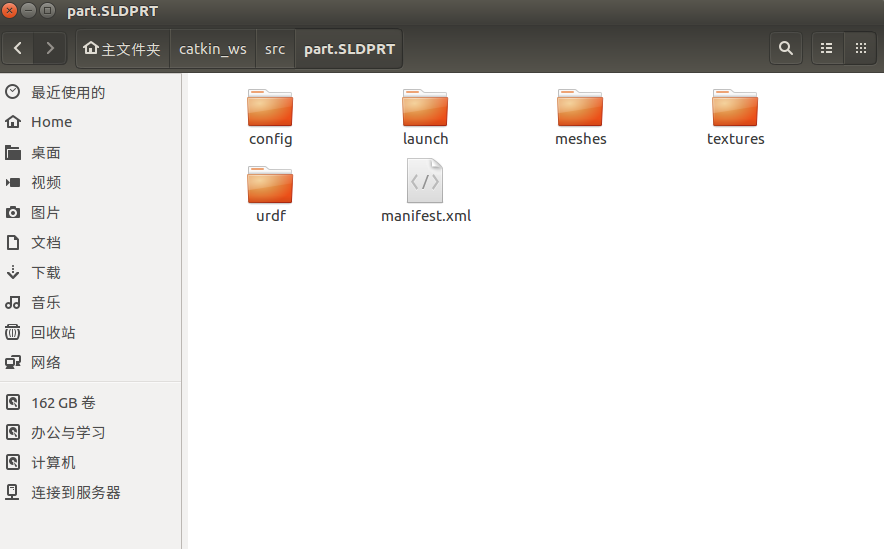
这时在保存路径上会生成功能包

三、修改文件
3.1 将part.SLDPRT功能包原封不动放在工作空间的src内
3.2 修改文件(装配体)
修改package.xml文件
<maintainer email="me2email.com" /> 修改为 <maintainer email="me2@email.com" />
修改两个launch文件
textfile="$(find my_paper_car)/robots/my_paper_car.urdf" /> 修改为 textfile="$(find my_paper_car)/urdf/my_paper_car.urdf" />
3.3 新建launch文件(单零件)
在launch文件夹下新建display.launch文件,内容如下:
<launch>
<param name="robot_description" textfile="$(find part.SLDPRT)/urdf/test.urdf" />
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find part.SLDPRT)/test.rviz" />
</launch>
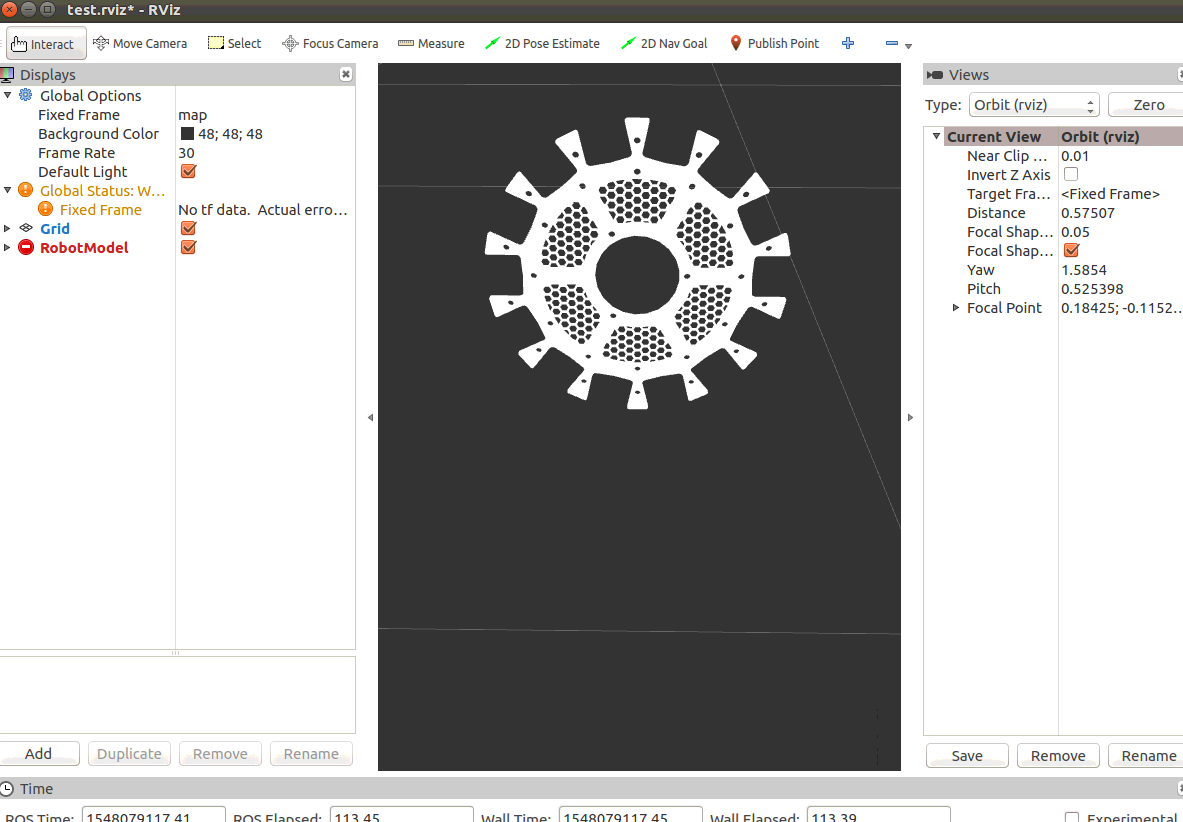
四、运行
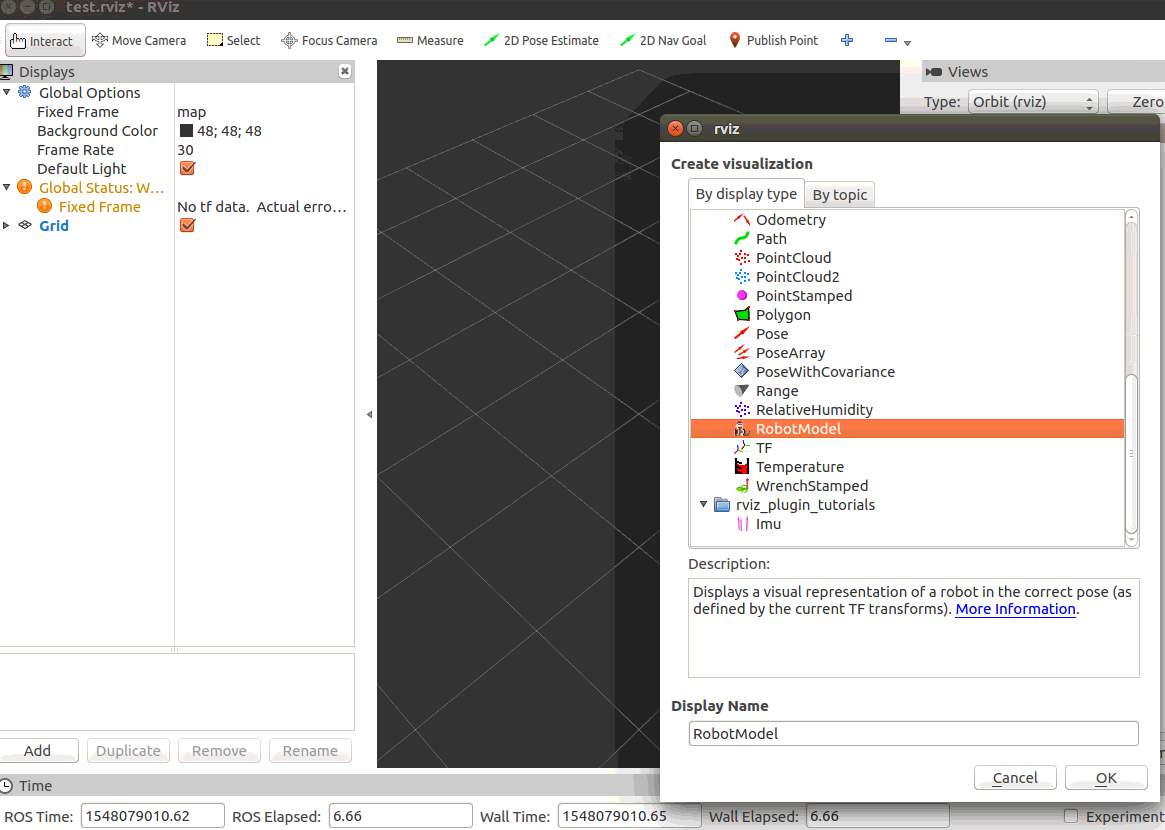
启动dispaly.launch文件
并在rviz里add robomodel
放大后效果如下:
-END-
ROS-Solidworks转URDF的更多相关文章
- Solidworks to Urdf to Sdf
. The urdf using tree form that does not support parallel robots (close loop robots). . The sdf usin ...
- <ROS> 机器人描述--URDF和XACRO
文章转自 https://blog.csdn.net/sunbibei/article/details/52297524 特此鸣谢原创作者的辛勤付出 1 URDF 文件 1.1 link和joint ...
- ROS * 了解学习urdf的内容格式及编写
<?xml version="1.0" ?> 声明文件使用xml描述 <robot name="robot_name">定义这是一个机器 ...
- Solidworks 2016中导出URDF文件
安装SolidWorks to URDF exporter插件 下载SolidWorks to URDF Exporter插件后按照网站上的步骤进行安装(目前该插件已经在Win 7 64位系统+Sol ...
- urdf 学习记录
1.URDF(Unified Robot Description Format),统一的机器人描述文件格式.主要用来描述机器人的几何形状,在可视化时(如RViz中)显示出机器人的几何形状.与画图软件( ...
- ROS探索总结(三)——ROS新手教程【转】
转自:http://blog.csdn.net/hcx25909/article/details/8811313 版权声明:本文为博主原创文章,未经博主允许不得转载. 目录(?)[-] 一ROS的 ...
- ROS_Kinetic_14 ROS工具roswtf的基本使用方法等
ROS_Kinetic_14 ROS工具roswtf的基本使用方法 官网教程:http://wiki.ros.org/cn/ROS/Tutorials/Getting%20started%20with ...
- 入门ROS教程与视频汇总(kinetic)
参考网址: Richard Wang 3 Shawn Chen 部分视频网址: http://v.youku.com/v_show/id_XMjUxMTc5MzE5Mg http://i.you ...
- ROS探索总结(三)——ROS新手教程
转自古-月 http://blog.csdn.net/hcx25909 前面我们介绍了ROS的特点和结构,接下来就要开始准备动手感受一下ROS的强大了. ROS官网的wiki上针对新手的教程很详细,最 ...
- ROS学习笔记(三)
机器人建模与仿真URDF(Unified Robot Descrption Format,统一机器人描述格式),ROS提供了URDF的c++解析器.安装语法检查工具sudo apt-get insta ...
随机推荐
- BZOJ2134: 单选错位(期望乱搞)
Time Limit: 10 Sec Memory Limit: 259 MBSubmit: 1101 Solved: 851[Submit][Status][Discuss] Descripti ...
- 「Redis 笔记」数据类型
REmote DIctionary Server(Redis),一个 key-value 存储系统. 数据类型 Redis 支持五种数据类型:string(字符串),hash(哈希),list(列表) ...
- (转)基于MVC4+EasyUI的Web开发框架经验总结(2)- 使用EasyUI的树控件构建Web界面
http://www.cnblogs.com/wuhuacong/p/3669575.html 最近花了不少时间在重构和进一步提炼我的Web开发框架上,力求在用户体验和界面设计方面,和Winform开 ...
- 学了5天Arm,今天谈谈初学感受 (转)
一.初探 4月1日入手友善mini2440.先看了下板子,感觉没什么稀奇的,s3c2440总线上外挂SDRAM(对这个不是很感冒,之前搞过一个FPGA的SDRAM控制器),NOR . ...
- Asp.net Core 源码-PagedList<T>
using System.Collections.Generic; using System.Linq; using System; using System.Linq.Expressions; us ...
- VS Code编写html(2)
<html> <head> <title>welcome to myspace</title> <meta charset="utf-8 ...
- BZOJ 1601: [Usaco2008 Oct]灌水 最小生成树_超级源点
Description Farmer John已经决定把水灌到他的n(1<=n<=300)块农田,农田被数字1到n标记.把一块土地进行灌水有两种方法,从其他农田饮水,或者这块土地建造水库. ...
- python的jieba分词
# 官方例程 # encoding=utf-8 import jieba seg_list = jieba.cut("我来到北京清华大学", cut_all=True) print ...
- STM32 ADC多通道转换DMA模式与非DMA模式两种方法(HAL库)
一.非DMA模式(转) 说明:这个是自己刚做的时候百度出来的,不是我自己做出来的,因为感觉有用就保存下来做学习用,原文链接:https://blog.csdn.net/qq_24815615/arti ...
- 模仿学习小游戏外星人入侵-Python学习,体会“函数”编程
游戏类如下: # !/usr/bin/python # -*- coding:utf-8 -*- """ Author :ZFH File :alien.py Softw ...