SURF特征检测
SERF(speed up robust feature )特征的关键特性:
- 特征检测
- 尺度空间:缩放到不同的大小或分辨率仍能检测
- 选择不变性:光照不变,旋转不变
- 特征向量:描述为一个特征向量
DDN过程为:检测、描述、匹配
工作原理:
- 选择感兴趣的区域POI,用Hessian矩阵找到,然后求取梯度
- 在不同尺度空间发现关键点,非最大信号压制,把不是局部的最大信号放弃
- 发现特征点,求取在某个方向上的特征最大值就找到了特征方向。旋转不变性
- 再根据光照不变性生成特征向量
Hessian矩阵:$\left[ {\begin{array}{*{20}{c}}
{\frac{{\partial {I^2}}}{{\partial {x^2}}}}&{\frac{{\partial {I^2}}}{{\partial x\partial y}}}\\
{\frac{{\partial {I^2}}}{{\partial y\partial x}}}&{\frac{{\partial {I^2}}}{{\partial {{\rm{y}}^2}}}}
\end{array}} \right]$
用Hessian矩阵寻找POI最好用整数特征点区域连续的浮点数特征计算

要近似转换成近似的整数计算如下:

\[\frac{{{\partial ^2}H}}{{\partial {x^2}}} = \left[ {\begin{array}{*{20}{c}}
{{d_{xx}}}&{{d_{yx}}}&{{d_{sx}}}\\
{{d_{xy}}}&{{d_{yy}}}&{{d_{sy}}}\\
{{d_{xs}}}&{{d_{ys}}}&{{d_{ss}}}
\end{array}} \right]\]
$$\frac{{\partial H}}{{\partial x}} = \left[ {\begin{array}{*{20}{c}}
{{d_x}}\\
{{d_y}}\\
{{d_z}}
\end{array}} \right]$$
尺度空间如下:中间X表示最大尺度空间
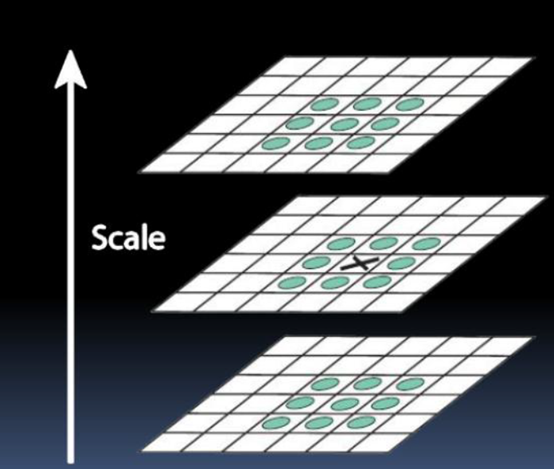
Hessian矩阵在尺度空间寻找关键点:$H(x) = H + \frac{{\partial {H^T}}}{{\partial x}}x + \frac{1}{2}{x^T}\frac{{{\partial ^2}{\rm{H}}}}{{\partial {x^2}}}x$(拉格朗日泰勒级数展开形式) 求取Hessian矩阵为0时候的x值$\hat x = - \frac{{{\partial ^2}{{\rm{H}}^{ - 1}}}}{{\partial {x^2}}}\frac{{\partial H}}{{\partial x}}$就是最大值,然后每次移动0.5,不断向这个最大值逼近,这样就在空间尺度找到最大关键点。
旋转不变性:

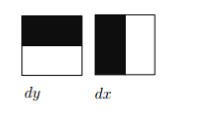
如图所示,在4$ \times $4的方格中,每隔方格为5$ \times $5的像素,用如图2$ \times $2的Haar在5$ \times $5的像素求取dx,dy,得到每个方向的值,然后所有5$ \times $5内的dx加起来,dy加起来,每个5$ \times $5的区域得到一个向量
\[V = \{ \sum {dx,} \sum {\left| {dx} \right|,} \sum {dy,} \sum {\left| {dy} \right|} \} \]
在4$ \times $4的方格中总共有16个向量。
原图如下:

minHessian = 400的特征点如下:

minHessian = 100的特征点如下:

相关函数解释:
static Ptr<SURF> create(double hessianThreshold=, //hessian关键点检测器的阈值,默认在300-500之间
int nOctaves = , //表示在4个尺度空间
int nOctaveLayers = , //每个尺度空间的层数
bool extended = false, //扩展描述符标志(true使用扩展的128个元素的描述符,false使用64个元素的描述符)
bool upright = false //旋转的特征标志(true不计算方向,false计算方向)
);
/****************************************************************/
detect( InputArray image, //图像
vector<KeyPoint>& keypoints,// 检测到的关键点
InputArray mask=noArray() //指定在哪里寻找关键点的掩码(必须是在感兴趣区域中具有非零值的8位整数矩阵)
);
/****************************************************************/
drawKeypoints(InputArray image, //源图像
vector<KeyPoint>& keypoints, //来自源图像的关键点
InputOutputArray outImage,//输出图像
const Scalar& color=Scalar::all(-), //关键点的颜色
int flags=DrawMatchesFlags::DEFAULT //设置绘图功能的标志
);
参考程序如下:
#include<opencv2/opencv.hpp>
#include<opencv2/xfeatures2d.hpp>
#include<iostream> using namespace std;
using namespace cv;
using namespace cv::xfeatures2d; int main(int argc, char *argv[])
{
Mat src = imread("H:/cv_code/image/home.jpg",);
if(src.empty())
{
printf("no image");
return -;
}
namedWindow("src",CV_WINDOW_AUTOSIZE);
imshow("src", src);
//Hessian矩阵
int minHessian = ;
Ptr <SURF> detector = SURF::create(minHessian);
vector <KeyPoint> keyPoints;
detector->detect(src,keyPoints,Mat());
//绘制关键点
Mat keyPoint_result;
drawKeypoints(src, keyPoints, keyPoint_result, Scalar::all(-), DrawMatchesFlags::DEFAULT);
namedWindow("src",CV_WINDOW_AUTOSIZE);
imshow("keyPoint_result", keyPoint_result); waitKey();
return ;
}
SURF特征检测的更多相关文章
- 第二节,surf特征检测关键点,实现图片拼接
初级的图像拼接为将两幅图像简单的粘贴在一起,仅仅是图像几何空间的转移和合成,与图像内容无关:高级图像拼接也叫做基于特征匹配的图像拼接,拼接时消去两幅图像相同的部分,实现拼接全景图. 实现步骤: 1.采 ...
- OpenCV——SURF特征检测、匹配与对象查找
SURF原理详解:https://wenku.baidu.com/view/2f1e4d8ef705cc1754270945.html SURF算法工作原理 选择图像中的POI(Points of i ...
- OpenCV探索之路(二十三):特征检测和特征匹配方法汇总
一幅图像中总存在着其独特的像素点,这些点我们可以认为就是这幅图像的特征,成为特征点.计算机视觉领域中的很重要的图像特征匹配就是一特征点为基础而进行的,所以,如何定义和找出一幅图像中的特征点就非常重要. ...
- opencv学习之路(35)、SURF特征点提取与匹配(三)
一.简介 二.opencv中的SURF算法接口 三.特征点匹配方法 四.代码 1.特征点提取 #include "opencv2/opencv.hpp" #include < ...
- 第十三节、SURF特征提取算法
上一节我们已经介绍了SIFT算法,SIFT算法对旋转.尺度缩放.亮度变化等保持不变性,对视角变换.仿射变化.噪声也保持一定程度的稳定性,是一种非常优秀的局部特征描述算法.但是其实时性相对不高. SUR ...
- 《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到. 看 ...
- opencv::SURF特征
SURF特征基本介绍 SURF(Speeded Up Robust Features)特征关键特性: -特征检测 -尺度空间 -选择不变性 -特征向量 工作原理 . 选择图像中POI(Points o ...
- SURF算法源代码OPENSURF分析
SURF算法源代码分析 平台:win x64 + VS2015专业版 +opencv2.4.11 配置类似参考OPENSIFT,参考我的另一篇博客:https://www.cnblogs.com/Al ...
- OpenCV 学习笔记 06 图像检索以及基于图像描述符的搜索
OpenCV 可以检测图像的主要特征,然后提取这些特征,使其成为图像描述符,这些图像特征可作为图像搜索的数据库:此外可以利用关键点将图像拼接 stitch 起来,组成一个更大的图像.如将各照片组成一个 ...
随机推荐
- C++不同类中的特征标相同的同名函数
转载请注明出处,版权归作者所有 lyzaily@126.com yanzhong.lee 作者按: 从这篇文章中,我们主要会认识到一下几点: ...
- archlinux+UEFI模式在linux主机下基于KVM-QEMU命令行虚拟机安装笔记
ArchLinux十分精简,并且具有强大的滚动更新.最近在基于ubuntu的宿主机下通过KVM-QEMU虚拟机安装了archlinux,将过程记录下来以供参考. 1.下载启动盘 1.1.下载archl ...
- selenium窗口截图操作
selenium窗口截图操作 使用背景:在自动化测试过程中,可能遇到执行错误情况,那么怎么样及时捕获出错信息/界面? 可以使用 get_screenshot_as_file(self,filenam ...
- P2571 [SCOI2010]传送带——hyl天梦
P2571 [SCOI2010]传送带题解----天梦 如写的不好,请多见谅. 对于这道题,我首先想说,确实困惑了我好久,看网上的各种题解,却都不尽人意,思路早已明白,却不会操作.最后想想,还是觉得自 ...
- 小程序图片 mode 设置为 widthFix 图片显示瞬间竖向拉伸变形闪烁
官方文档中 mode="widthFix" 宽度不变,高度自动变化,保持原图宽高比不变,即设置图片宽度而高度自适应. 但是在实际开发中发现图片在初始加载时瞬间竖向拉伸变形闪烁然 ...
- web开发发展历程
cs架构:(软件主要运行在桌面上,数据库软件运行在服务器端) 缺点:如果web应用修改或升级,需要每个客户端逐个升级桌面App,因此Browser/server模式开始流行. bs架构:应用程序的逻辑 ...
- Codeforces_729_C
http://codeforces.com/problemset/problem/729/C 二分找最小容量,然后找符合的最小花费. #include<iostream> #include ...
- BZOJ 2733 [HNOI2012]永无乡 (权值线段树启发式合并+并查集)
题意: n<=1e5的图里,在线连边.查询某连通块第k大 思路: 练习线段树合并的好题,因为依然记得上一次启发式合并trie的时候内存爆炸的恐怖,所以这次还是用了动态开点.回收 听说启发式合并s ...
- A simple way to monitor SQL server SQL performance.
This is all begins from a mail. ... Dear sir: This is liulei. Thanks for your help about last PM for ...
- 全网最详细的Linux命令系列-Screen远程会话命令
screen 管理你的远程会话 你是不是经常需要 SSH 或者 telent 远程登录到 Linux 服务器?你是不是经常为一些长时间运行的任务而头疼,比如系统备份.ftp 传输等等.通常情况下我们都 ...