浅谈压缩感知(十九):MP、OMP与施密特正交化
关于MP、OMP的相关算法与收敛证明,可以参考:http://www.cnblogs.com/AndyJee/p/5047174.html,这里仅简单陈述算法流程及二者的不同之处。
主要内容:
- MP的算法流程及其MATLAB实现
- OMP的算法流程以及MATLAB实现
- MP与OMP的区别
- 施密特正交化与OMP的关系
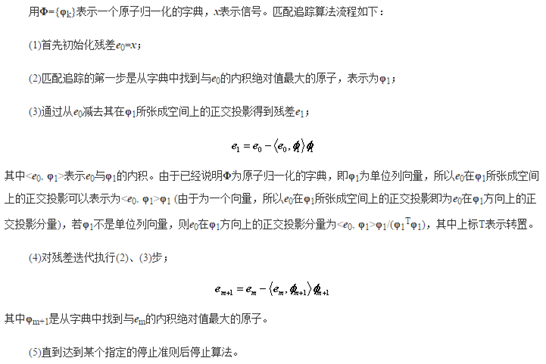
一、MP(匹配追踪)的算法流程:
二、MP的MATLAB实现:
% MP:匹配追踪算法
% dictionary: 超完备字典
% x: 待表示信号
% M = ; N = ;
% Phi = randn(M,N); % 字典
% for nn = :N
% Phi(:,nn) = Phi(:,nn)/norm(Phi(:,nn));
% end
% b = randn(M,); % 信号
function x = MP(dictionary,x,iter)
[M,N] = size(dictionary);
residual = zeros(M,iter); %残差矩阵,保存每次迭代后的残差
residual(:,) = x; %初始化残差为x
L = size(residual,); %得到残差矩阵的列
pos_num = zeros(,L); %用来保存每次选择的列序号
resi_norm = zeros(,L); %用来保存每次迭代后的残差的2范数
resi_norm() = norm(x); %因为前面已初始化残差为x
iter_out = 1e-;
iter_count = ; for mm = :iter
%迭代退出条件
if resi_norm(mm) < iter_out
break;
end
%求出dictionary每列与上次残差的内积
scalarproducts = dictionary'*residual(:,mm);
%找到内积中最大的列及其内积值
[val,pos] = max(abs(scalarproducts));
%更新残差
residual(:,mm+) = residual(:,mm) - scalarproducts(pos)*dictionary(:,pos);
%计算残差的2范数(平方和再开根号)
resi_norm(mm+) = norm(residual(:,mm+));
%保存选择的列序号
pos_num(mm) = pos;
iter_count = iter_count + ;
end
%绘出残差的2范数曲线
resi_norm = resi_norm(:iter_count+);
plot(resi_norm);grid;
%显示选择的字典原子
pos_num = pos_num(:iter_count);
disp(pos_num);
%稀疏系数(稀疏表示)
dict = dictionary(:,pos_num);
y_vec = (dict'*dict)^(-1)*dict'*x;
disp(y_vec);
figure;plot(y_vec);
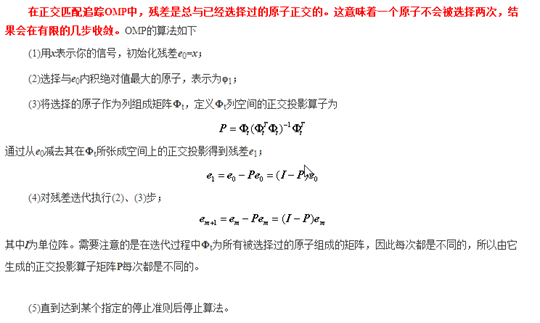
三、OMP(正交匹配追踪)的算法流程:
四、OMP的MATLAB实现:
% MP:匹配追踪算法
% dictionary: 超完备字典
% x: 待表示信号
% M = ; N = ;
% Phi = randn(M,N); % 字典
% for nn = :N
% Phi(:,nn) = Phi(:,nn)/norm(Phi(:,nn));
% end
% b = randn(M,); % 信号
function x = OMP(dictionary,x,iter)
[M,N] = size(dictionary);
residual = zeros(M,iter); %残差矩阵,保存每次迭代后的残差
residual(:,) = x; %初始化残差为x
L = size(residual,); %得到残差矩阵的列
pos_num = zeros(,L); %用来保存每次选择的列序号
resi_norm = zeros(,L); %用来保存每次迭代后的残差的2范数
resi_norm() = norm(x); %因为前面已初始化残差为x
iter_out = 1e-;
iter_count = ;
aug_mat = []; for mm = :iter
%迭代退出条件
if resi_norm(mm) < iter_out
break;
end
%求出dictionary每列与上次残差的内积
scalarproducts = dictionary'*residual(:,mm);
%找到内积中最大的列及其内积值
[val,pos] = max(abs(scalarproducts));
%最小二乘的增广矩阵
aug_mat = [aug_mat dictionary(:,pos)];
%最小二乘投影
proj_y = aug_mat*(aug_mat'*aug_mat)^(-1)*aug_mat'*x;
%更新残差
residual(:,mm+) = x - proj_y;
%计算残差的2范数(平方和再开根号)
resi_norm(mm+) = norm(residual(:,mm+));
%保存选择的列序号
pos_num(mm) = pos;
iter_count = iter_count + ;
end
%绘出残差的2范数曲线
resi_norm = resi_norm(:iter_count+);
plot(resi_norm);grid;
%显示选择的字典原子
pos_num = pos_num(:iter_count);
disp(pos_num);
%稀疏系数
dict = dictionary(:,pos_num);
y_vec = (dict'*dict)^(-1)*dict'*x;
disp(y_vec);
figure;plot(y_vec);
五、MP与OMP的区别:
OMP与MP的不同根本在于残差更新过程:OMP减去的Pem是em在所有被选择过的原子组成的矩阵Φt所张成空间上的正交投影,而MP减去的Pem是em在本次被选择的原子φm所张成空间上的正交投影。基于此,OMP可以保证已经选择过的原子不会再被选择。
六、施密特(Schimidt)正交化与OMP
1、施密特(Schimidt)正交化的过程:

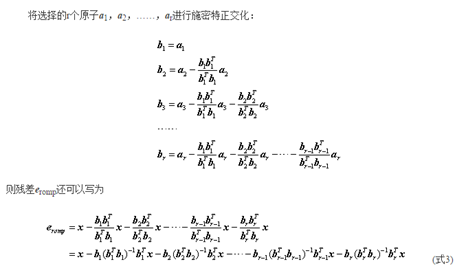
上面的的[x,y]表示向量内积,[x,y]=xTy=yTx=[x,y]。施密特正交化公式中的br实际上可写为:

分子之所以可以这么变化是由于[x,y]实际上为一个数,因此[x,y]x=x[x,y]= xxTy。
2、OMP与施密特(Schimidt)正交化的关系:
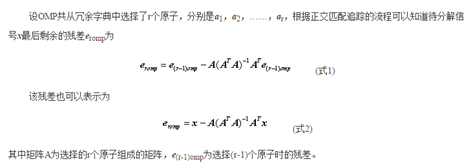
结论:OMP分解过程,实际上是将所选原子依次进行Schimidt正交化,然后将待分解信号减去在正交化后的原子上各自的分量即可得残差。其实(式3)求残差的过程也是在进行施密特正交化。
3、验证OMP残差求解过程与Schmidt正交化的关系
% 验证OMP残差求解过程与Schmidt正交化的关系
%
clc;clear;close all;
M = ; N = ;
Phi = randn(M,N); % 字典
for nn = :N
Phi(:,nn) = Phi(:,nn)/norm(Phi(:,nn));
end
b = randn(M,); % 信号
res0 = b; % 初始化残差为待稀疏信号b
% OMP
% 选择字典第一个原子
c1 = Phi'* res0; % 求矩阵Phi各列与b的内积
[val1,pos1] = max(abs(c1)); % 找到内积中最大的列及其内积值
phit = [Phi(:,pos1)]; % 由所有选出的列组合的矩阵
Pphi = phit*(phit'*phit)^(-1)*phit'; % 正交投影变换矩阵
omp_res1 = res0 - Pphi*res0; % OMP用上一次残差减去残差在phit列空间的正交投影
omp_resb = b - Pphi*b; % OMP用待稀疏信号b减去b在phit列空间的正交投影
% Schimidt
x = Phi(:,pos1); % Schimidt正交化第一个向量
Px = x*(x'*x)^(-1)*x';
smt_res1 = res0 - Px*b; % 实际上是b - Px*b
% test
norm(omp_res1-omp_resb)
norm(omp_resb-smt_res1) % OMP
% 选择字典第二列
c2 = Phi' * omp_res1;
[val2,pos2] = max(abs(c2));
phit = [Phi(:,pos1) Phi(:,pos2)];
Pphi = phit*(phit'*phit)^(-1)*phit';
omp_res2 = omp_res1 - Pphi*omp_res1;
omp_resb = b - Pphi*b;
% Schimidt
y = Phi(:,pos2) - Px*Phi(:,pos2); % Schimidt正交化第二个向量
Py = y*(y'*y)^(-1)*y';
smt_res2 = smt_res1 - Py*b; % 实际上是b - Px*b - Py*b,上一次残差减去b在第2列正交化所得z上的投影
% test
norm(omp_res2-omp_resb)
norm(omp_resb-smt_res2) % OMP
% 选择字典第三列
c3 = Phi' * omp_res2;
[val3,pos3] = max(abs(c3));
phit = [Phi(:,pos1) Phi(:,pos2) Phi(:,pos3)];
Pphi = phit*(phit'*phit)^(-1)*phit';
omp_res3 = omp_res2 - Pphi*omp_res2;
omp_resb = b - Pphi*b;
% Schimidt
z = Phi(:,pos3) - Px*Phi(:,pos3) - Py*Phi(:,pos3); % Schimidt正交化第三个向量
Pz = z*(z'*z)^(-1)*z';
smt_res3 = smt_res2 - Pz*b; % 实际上是b - Px*b - Py*b - Pz*b,上一次残差减去b在第3列正交化所得z上的投影
% test
norm(omp_res3-omp_resb)
norm(omp_resb-smt_res3)
参考文章:
http://blog.csdn.net/jbb0523/article/details/45099655
http://blog.csdn.net/jbb0523/article/details/45100351
浅谈压缩感知(十九):MP、OMP与施密特正交化的更多相关文章
- 浅谈压缩感知(九):正交匹配追踪算法OMP
主要内容: OMP算法介绍 OMP的MATLAB实现 OMP中的数学知识 一.OMP算法介绍 来源:http://blog.csdn.net/scucj/article/details/7467955 ...
- 浅谈压缩感知(二十一):压缩感知重构算法之正交匹配追踪(OMP)
主要内容: OMP的算法流程 OMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.OMP的算法流程 二.OMP的MATL ...
- 浅谈压缩感知(二十):OMP与压缩感知
主要内容: OMP在稀疏分解与压缩感知中的异同 压缩感知通过OMP重构信号的唯一性 一.OMP在稀疏分解与压缩感知中的异同 .稀疏分解要解决的问题是在冗余字典(超完备字典)A中选出k列,用这k列的线性 ...
- 浅谈压缩感知(二十四):压缩感知重构算法之子空间追踪(SP)
主要内容: SP的算法流程 SP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 SP与CoSaMP的性能比较 一.SP的算法流程 压缩采样匹配追踪(CoSaMP)与子 ...
- 浅谈压缩感知(三十):压缩感知重构算法之L1最小二乘
主要内容: l1_ls的算法流程 l1_ls的MATLAB实现 一维信号的实验与结果 前言 前面所介绍的算法都是在匹配追踪算法MP基础上延伸的贪心算法,从本节开始,介绍基于凸优化的压缩感知重构算法. ...
- 浅谈压缩感知(二十八):压缩感知重构算法之广义正交匹配追踪(gOMP)
主要内容: gOMP的算法流程 gOMP的MATLAB实现 一维信号的实验与结果 稀疏度K与重构成功概率关系的实验与结果 一.gOMP的算法流程 广义正交匹配追踪(Generalized OMP, g ...
- 浅谈压缩感知(二十六):压缩感知重构算法之分段弱正交匹配追踪(SWOMP)
主要内容: SWOMP的算法流程 SWOMP的MATLAB实现 一维信号的实验与结果 门限参数a.测量数M与重构成功概率关系的实验与结果 SWOMP与StOMP性能比较 一.SWOMP的算法流程 分段 ...
- 浅谈压缩感知(二十五):压缩感知重构算法之分段正交匹配追踪(StOMP)
主要内容: StOMP的算法流程 StOMP的MATLAB实现 一维信号的实验与结果 门限参数Ts.测量数M与重构成功概率关系的实验与结果 一.StOMP的算法流程 分段正交匹配追踪(Stagewis ...
- 浅谈压缩感知(二十二):压缩感知重构算法之正则化正交匹配追踪(ROMP)
主要内容: ROMP的算法流程 ROMP的MATLAB实现 一维信号的实验与结果 测量数M与重构成功概率关系的实验与结果 一.ROMP的算法流程 正则化正交匹配追踪ROMP算法流程与OMP的最大不同之 ...
随机推荐
- 保存 laravel model 而不更新 timestamps 的方法
$product = Product::find(1); $product->view_count += 1; $product->timestamps = false; $product ...
- PHP获取文件大小的方法详解
对于初入门的PHP新手来说,PHP获取文件大小这个功能实现,或许有一定的难度.但是相信新手小白们在看过本篇文章介绍后,一定能轻松掌握PHP获取文件大小的重要知识! 下面我们通过具体的代码示例,为大家详 ...
- web----WSGI
概念: WSGI协议其实是定义了一种server与application解耦的规范 WSGI规范简单理解:一方面给Server提供接口,凡是以这种接口的web服务器,都是遵循WSGI规范的 另一方面给 ...
- 步步为营-23-通过GridView实现增删改
说明:把xml中的数据放入到数据源list中然后显示到gridview中,参考上一节内容 1 UI页面 2创建student类 public class Student { public int ID ...
- OSGI命令
OSGi的一些支离破碎的知识 以下命令说明内容来自于Eclipse的OSGi框架Equinox. ---Controlling the OSGi framework---launch - start ...
- 【C++ Primer 第15章】定义派生类析构函数
学习资料 • 基类和派生类析构函数执行顺序 定义派生类析构函数 [注意]定义一个对象时先调用基类的构造函数.然后调用派生类的构造函数:析构的时候恰好相反:先调用派生类的析构函数.然后调用基类的析构函数 ...
- hdu 5256 最少修改多少个数 能使原数列严格递增 (LIS)
Problem Description我们有一个数列A1,A2...An,你现在要求修改数量最少的元素,使得这个数列严格递增.其中无论是修改前还是修改后,每个元素都必须是整数. 请输出最少需要修改多少 ...
- AOJ 2249 Road Construction (dijkstra)
某国王需要修路,王国有一个首都和多个城市,需要修路.已经有修路计划了,但是修路费用太高. 为了减少修路费用,国王决定从计划中去掉一些路,但是需要满足一下两点: 保证所有城市都能连通 所有城市到首都的最 ...
- vtiger7菜单管理
添加了新模块,但是菜单上却没显示. 和菜单相关的表有4张 我们要把新建的message放到support模块下面 1.把默认的父级目录tools改成support 2. app2tab 0表示不显示, ...
- 3237: [Ahoi2013]连通图 线段树分治
题解: cf765f cf671e bzoj4184 bzoj4552 线段树分治裸题 还是介绍一下线段树分治 这个东西其实挺简单但也挺有用的 可以把删除+插入操作变成只有插入(倒着就是删除) 像这一 ...