PID:我应该何时计算积分项?
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/07/pid-when-should-i-compute-the-integral-term/
最近有一个建议张贴到初学者的PID系列。争议的焦点是,如果您解决拉普拉斯域中的问题,它指定了执行积分项的不同方式。评论人士建议,与其看某一点的误差总和,不如看最后一个点的总和。
因此,当前的代码是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input;
ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput;
建议是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input; double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput; ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
我从未见过这样做,但我想我应该试一试。我设计的测试是一个简单的设定值阶跃,然后是一个斜坡下降。

当控制器设置为默认的采样时间时,差异是无法察觉的。为了突出这两种方法之间的差异,我决定将PID采样时间从默认值100mS提高到5秒。
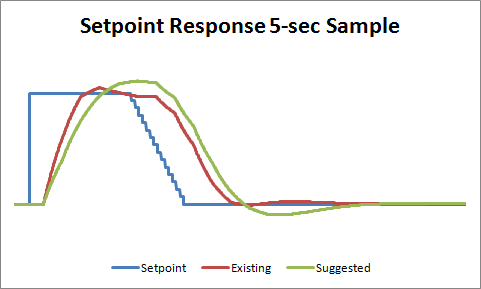
这里我们可以看到一个明显的赢家。现有的PID代码的性能比建议的要好,这可能是因为积分项对进程更改的响应要早5秒。但是为了确保我没有遗漏任何东西,我决定再做一次测试。我没有改变设定值,而是在系统中引入了负载变化。
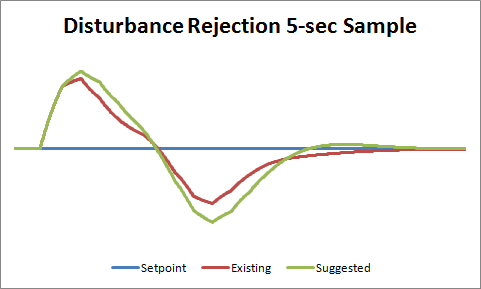
同样,现有的 PID 代码性能更好,处理负载变化更快。
那么判决呢?虽然这是一个有趣的锻炼,但我认为结果很清楚。我会保持原来的代码。
欢迎关注:

PID:我应该何时计算积分项?的更多相关文章
- Opencv中integral计算积分图
Paul Viola和Michael Jones在2001年首次将积分图应用在图像特征提取上,在他们的论文"Rapid Object Detection using a Boosted Ca ...
- PID教程
PID教程 介绍 本教程将向您展示了比例每一个比例项 (P)的特点,积分项(I)和微分项 (D) 控制,以及怎样使用它们来获得所需的响应.在本教程中,我们会考虑下面单位反馈系统: Plant[被控对象 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- PID 通俗解释
PID 控制原理3 个故事:看完您就明白了.1.: PID 的故事小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就 ...
- PID控制器开发笔记之四:梯形积分PID控制器的实现
从微积分的基本原理看,积分的实现是在无限细分的情况下进行的矩形加和计算.但是在离散状态下,时间间隔已经足够大,矩形积分在某些时候显得精度要低了一些,于是梯形积分被提出来以提升积分精度. 1.梯形积分基 ...
- PID算法(c 语言)(来自老外)
#include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; // integer that c ...
- PID控制器的应用:控制网络爬虫抓取速度
一.初识PID控制器 冬天乡下人喜欢烤火取暖,常见的情形就是四人围着麻将桌,桌底放一盆碳火.有人觉得火不够大,那加点木炭吧,还不够,再加点.片刻之后,又觉得火太大,脚都快被烤熟了,那就取出一些木碳…… ...
- PID控制算法
PID控制算法 四轴如何起飞的原理 四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了. 四轴飞行器飞行过程中如何保持水平: 我们先假设一种理想状况:四个电 ...
随机推荐
- 瑞克和莫蒂|S3E03 Rick为什么要把自己变成一根腌黄瓜?
给尚未入坑Rick and Morty的小伙伴们为一点背景知识 S3E1在说什么? rick从监狱里回来,顺手搞垮了统治地球的银河联邦政府.Jerry因此丢了工作,非常不高兴.于是向Beth质问 ...
- appium+python自动化63-使用Uiautomator2报错问题解决
前言 appium desktop V1.7.1版本使用命令行版本启动appium后,使用Uiautomator2定位toast信息报错:appium-uiautomator2-server-v0.3 ...
- httpclient post请求中文乱码解决办法
在使用httpclient发送post请求的时候,接收端中文乱码问题解决. 正文: 我们都知道,一般情况下使用post请求是不会出现中文乱码的.可是在使用httpclient发送post请求报文含中文 ...
- mybatis框架-SqlSession会话操作数据库的两种方式
1.通过SqlSession实力来直接执行已经映射的sql语句 例如,查询整个用户表中的信息 在UserMapper.xml中编写sql语句 编写测试方法: 注意:这里使用的selectList方法: ...
- BM递推杜教版
#include <bits/stdc++.h> using namespace std; #define rep(i,a,n) for (long long i=a;i<n;i++ ...
- Spring之IOC(控制反转)与AOP(面向切面编程)
控制反转——Spring通过一种称作控制反转(IoC)的技术促进了松耦合.当应用了IoC,一个对象依赖的其它对象会通过被动的方式传递进来,而不是这个对象自己创建或者查找依赖对象.可以认为IoC与JND ...
- C# where 泛型类型约束
泛型定义中的 where 子句指定对用作泛型类型.方法.委托或本地函数中类型参数的参数类型的约束. 约束可指定接口.基类或要求泛型类型为引用.值或非托管类型. 它们声明类型参数必须具备的功能. 作为约 ...
- know thself
- bg/fg
将一个在后台暂停的命令,变成继续执行 (在后台执行). 一般ctrl+z就把前台命令调到了后台 将后台中的命令调至前台继续运行
- linux date获取时间戳
linux 时间戳格式 年月日 时分秒: `date ‘+%Y%m%d%H%M%S’`date +%Y%m%d%H%M%S // 年月日 时分秒date +%s // 从 1970年1月1日零点开始到 ...