PID:我应该何时计算积分项?
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/07/pid-when-should-i-compute-the-integral-term/
最近有一个建议张贴到初学者的PID系列。争议的焦点是,如果您解决拉普拉斯域中的问题,它指定了执行积分项的不同方式。评论人士建议,与其看某一点的误差总和,不如看最后一个点的总和。
因此,当前的代码是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input;
ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput;
建议是这样的:
/*Compute all the working error variables*/
double input = *myInput;
double error = *mySetpoint - input; double dInput = (input - lastInput); /*Compute PID Output*/
double output = kp * error + ITerm- kd * dInput; ITerm+= (ki * error);
if(ITerm > outMax) ITerm= outMax;
else if(ITerm < outMin) ITerm= outMin;
我从未见过这样做,但我想我应该试一试。我设计的测试是一个简单的设定值阶跃,然后是一个斜坡下降。

当控制器设置为默认的采样时间时,差异是无法察觉的。为了突出这两种方法之间的差异,我决定将PID采样时间从默认值100mS提高到5秒。
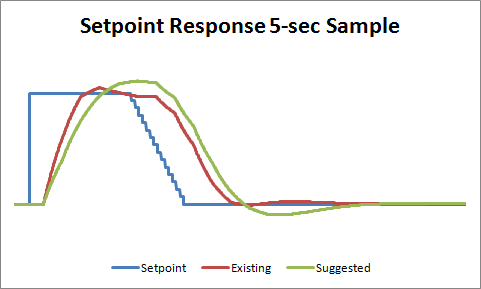
这里我们可以看到一个明显的赢家。现有的PID代码的性能比建议的要好,这可能是因为积分项对进程更改的响应要早5秒。但是为了确保我没有遗漏任何东西,我决定再做一次测试。我没有改变设定值,而是在系统中引入了负载变化。
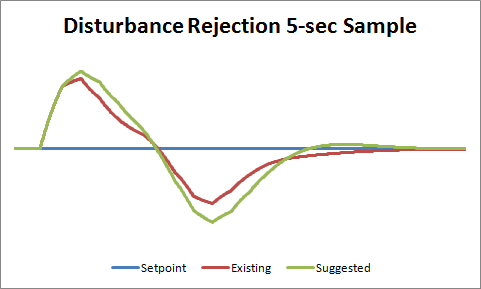
同样,现有的 PID 代码性能更好,处理负载变化更快。
那么判决呢?虽然这是一个有趣的锻炼,但我认为结果很清楚。我会保持原来的代码。
欢迎关注:

PID:我应该何时计算积分项?的更多相关文章
- Opencv中integral计算积分图
Paul Viola和Michael Jones在2001年首次将积分图应用在图像特征提取上,在他们的论文"Rapid Object Detection using a Boosted Ca ...
- PID教程
PID教程 介绍 本教程将向您展示了比例每一个比例项 (P)的特点,积分项(I)和微分项 (D) 控制,以及怎样使用它们来获得所需的响应.在本教程中,我们会考虑下面单位反馈系统: Plant[被控对象 ...
- PID算法笔记2
总所周知,PID算法是个很经典的东西.而做自平衡小车,飞行器PID是一个必须翻过的坎.因此本节我们来好好讲解一下PID,根据我在学习中的体会,力求通俗易懂.并举出PID的形象例子来帮助理解PID.一. ...
- PID算法(c 语言)(转)
PID算法(c 语言)(来自老外) #include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; ...
- PID 通俗解释
PID 控制原理3 个故事:看完您就明白了.1.: PID 的故事小明接到这样一个任务:有一个水缸点漏水(而且漏水的速度还不一定固定不变),要求水面高度维持在某个位置,一旦发现水面高度低于要求位置,就 ...
- PID控制器开发笔记之四:梯形积分PID控制器的实现
从微积分的基本原理看,积分的实现是在无限细分的情况下进行的矩形加和计算.但是在离散状态下,时间间隔已经足够大,矩形积分在某些时候显得精度要低了一些,于是梯形积分被提出来以提升积分精度. 1.梯形积分基 ...
- PID算法(c 语言)(来自老外)
#include <stdio.h> #include<math.h> //定义PID 的结构体 struct _pid { int pv; // integer that c ...
- PID控制器的应用:控制网络爬虫抓取速度
一.初识PID控制器 冬天乡下人喜欢烤火取暖,常见的情形就是四人围着麻将桌,桌底放一盆碳火.有人觉得火不够大,那加点木炭吧,还不够,再加点.片刻之后,又觉得火太大,脚都快被烤熟了,那就取出一些木碳…… ...
- PID控制算法
PID控制算法 四轴如何起飞的原理 四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了. 四轴飞行器飞行过程中如何保持水平: 我们先假设一种理想状况:四个电 ...
随机推荐
- Java 15周作业
题目1:编写一个应用程序,输入用户名和密码,访问test数据库中t_login表(字段包括id.username.password),验证登录是否成功. 题目2:在上一题基础上,当登录成功后,将t_u ...
- c++中关联容器map的使用
C++关联容器<map>简单总结(转) 补充: 使用count,返回的是被查找元素的个数.如果有,返回1:否则,返回0.注意,map中不存在相同元素,所以返回值只能是1或0. 使用find ...
- JS优化常用片断
防抖debounce装饰器 在事件被触发n秒后再执行回调,如果在这n秒内又被触发,则重新计时. function debounce(func, delay) { let isCooldown = fa ...
- AtCoder Beginner Contest 132 解题报告
前四题都好水.后面两道题好难. C Divide the Problems #include <cstdio> #include <algorithm> using names ...
- invoke和begininvoke 区别
一直对invoke和begininvoke的使用和概念比较混乱,这两天看了些资料,对这两个的用法和原理有了些新的认识和理解. 首先说下,invoke和begininvoke的使用有两种情况: 1. c ...
- 1、HDFS 架构、启动过程
Hadoop Distributed File System 易于拓展的分布式文件系统 运行在大量普通廉价机器上,提供容错机制 为大量用户提供性能不错的文件存取服务 NameNode Namenode ...
- 洛谷 P1821 [USACO07FEB]银牛派对Silver Cow Party 题解
P1821 [USACO07FEB]银牛派对Silver Cow Party 题目描述 One cow from each of N farms (1 ≤ N ≤ 1000) conveniently ...
- 二八法则(The 80/20 Principle)
二八法则的定义:在任何一组事物中,最重要的只占其中一小部分,约20%,其余80%尽管占多数,却是次要的. 二八法则的例子:社会上20%的人占有80%的社会财富 20%的工厂有80%的产出 80%的利润 ...
- 【JZOJ6206】【20190610】二分图边染色
题目 对一个二分图的边染色,满足有相同端点的边的颜色一定不同; 设最优染色为\(C\) ,你的染色为\(X\),只需要满足$ X \le 2^ {\lceil log C \rceil }$ ...
- javascript之随机密码[必包含大写,小写,数字]
js取两个数字之间的随机数: parseInt(Math.random()*(上限-下限+1)+下限) 如:取1-10之间的随机数 parseInt(Math.random()*(10-1+1)+ ...