MATLAB神经网络(6) PID神经元网络解耦控制算法——多变量系统控制
6.1 案例背景
6.1.1 PID神经元网络结构
PID神经元网络从结构上可以分为输入层、隐含层和输出层三层,$n$个控制量的PID神经元网络包含$n$个并列的相同子网络,各个子网络间既相互独立,又通过网络连接权值相互联系。每个子网络的输入层有两个神经元,分别接收控制量的目标值和当前值。每个子网络的隐含层由比例元、积分元和微分元构成,分别对应着PID控制器中的比例控制、积分控制和微分控制。PID神经元网络按被控系统控制量的个数可以分为控制单变量系统的单控制量神经元网络和控制多变量系统的多控制量神经元网络。其中单控制量神经元网络是PID神经元网络的基本形式,多控制量神经元网络可以看成是多个单控制量神经元网络的组合形式。
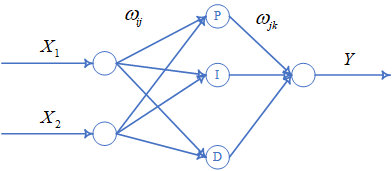
$X_{1}$是控制量的控制目标,$X_{2}$是控制量当前值,$Y$是神经元网络计算得到的控制律,${\omega _{ij}}$和${\omega _{jk}}$是网络权值,从中可以看到单控制量神经元网络是一个三层前向神经元网络,网络结构为2-3-1,隐含层包含比例元、积分元和微分元三个神经元。
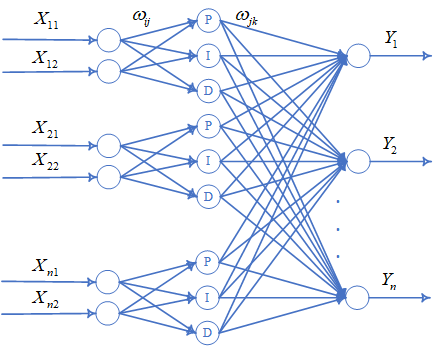
多控制量神经元网络可以看成多个单控制量网络的并联连接,$X_{11},X_{21},...,X_{n1}$是控制量的控制目标,$X_{12},X_{22},...,X_{n2}$是控制量的当前值,$Y_{1},Y_{2},...,Y_{n}$是多控制量神经元网络计算得到的控制律,${\omega _{ij}}$和${\omega _{jk}}$是网络权值。
6.1.2 控制率
- 输入层:输出数据$x_{si}$等于输入数据$X_{si}$:${x_{si}}(k) = {X_{si}}(k)$;
- 隐含层:输入值\[ne{t_{sj}}(k) = \sum\limits_{i = 1}^2 {{\omega _{ij}}{x_{si}}(k)\;\;\;j = 1,2,3} \]比例神经元\[{u_{s1}} = ne{t_{s1}}(k)\]积分神经元\[{u_{s2}} = ne{t_{s2}}(k) + ne{t_{s2}}(k - 1)\]微分神经元\[{u_{s3}} = ne{t_{s3}}(k) - ne{t_{s3}}(k - 1)\]
- 输出层:\[{y_k} = \sum\limits_{s = 1}^n {\sum\limits_{j = 1}^3 {{\omega _{jk}}{u_{sj}}(k)} } \]
6.1.3 权值修正
误差计算公式:\[J = \sum {E = \sum\limits_{k = 1}^n {{{[{y_h}(k) - r(k)]}^2}} } \]其中$n$为输出节点个数,$y_{h}(k)$为预测输出,$r(k)$为控制目标。
- 输出层到隐含层:\[{\omega _{jk}}(k + 1) = {\omega _{jk}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{jk}}}}\]
- 输入层到输出层:\[{\omega _{ij}}(k + 1) = {\omega _{ij}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{ij}}}}\]
其中$\eta$为学习速率。
6.1.4 控制对象
传递函数:
\[\left\{ \begin{array}{l}
{y_1}(k) = 0.4{y_1}(k - 1) + {u_1}(k - 1)/[1 + {u_1}{(k - 1)^2}] + 0.2{u_1}{(k - 1)^3} + 0.5{u_2}(k - 1) + 0.3{y_2}(k - 1)\\
{y_2}(k) = 0.2{y_2}(k - 1) + {u_2}(k - 1)/[1 + {u_2}{(k - 1)^2}] + 0.4{u_2}{(k - 1)^3} + 0.2{u_1}(k - 1) + 0.3{y_3}(k - 1)\\
{y_3}(k) = 0.3{y_3}(k - 1) + {u_3}(k - 1)/[1 + {u_3}{(k - 1)^2}] + 0.4{u_3}{(k - 1)^3} + 0.4{u_2}(k - 1) + 0.3{y_1}(k - 1)
\end{array} \right.\]
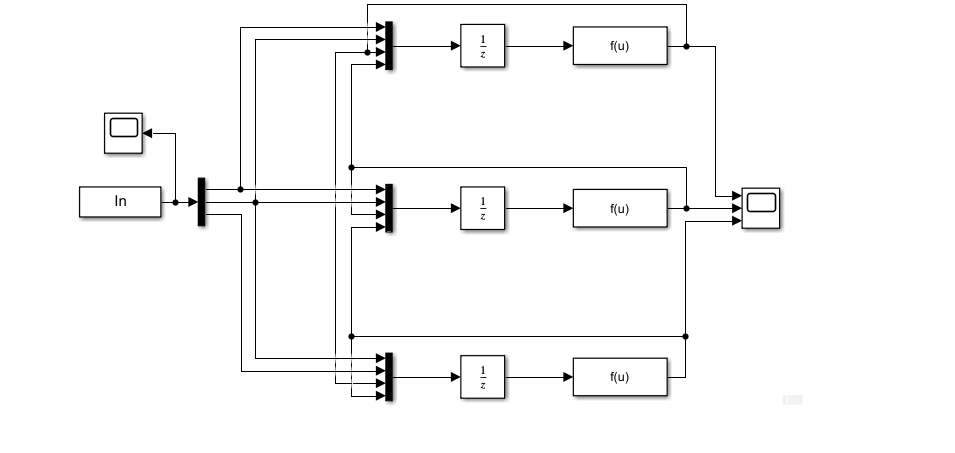
6.2 模型建立
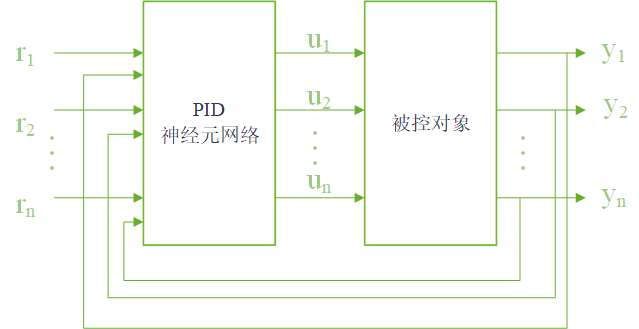
$r_{1}$,r_{2},...,r_{n}$是控制器目标,$u_{1}$,u_{2},...,u_{n}$为控制器规律,$y_{1}$,y_{2},...,y_{n}$为控制器当前值。
3个控制量——3个单神经元网络。
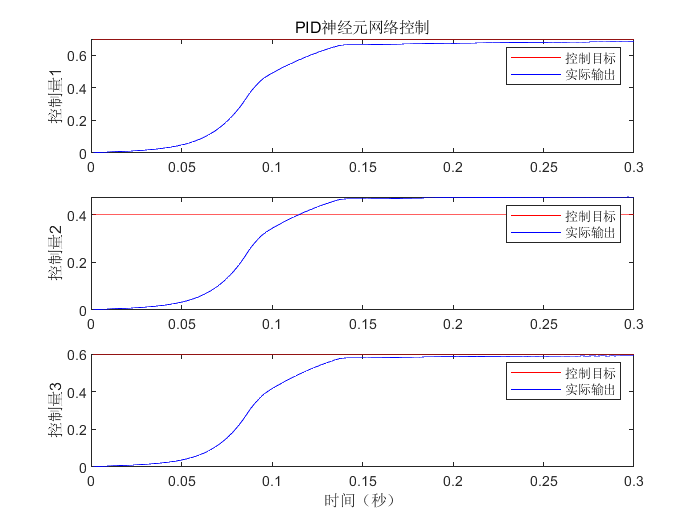
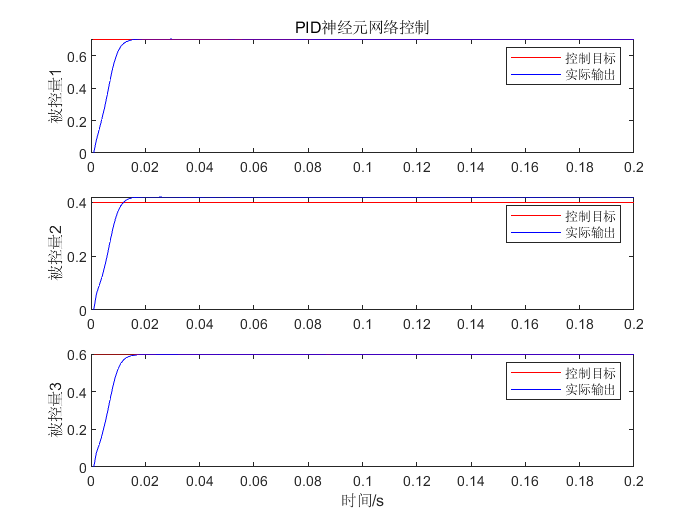
控制量初始值[0,0,0],控制目标为[0.7,0.4,0.6],控制时间间隔0.001s。
6.3 编程实现
6.3.1 初始化
%% 基于PID神经网络的系统控制算法
%% 清空环境变量
clc
clear %% 网络结构初始化
rate1=0.006;rate2=0.001; %学习率
K=3;
y_1=zeros(3,1);y_2=y_1; %输出值
u_1=zeros(3,1);u_2=u_1; %控制率
h1i=zeros(3,1);h1i_1=h1i; %第一个控制量
h2i=zeros(3,1);h2i_1=h2i; %第二个控制量
h3i=zeros(3,1);h3i_1=h3i; %第三个控制量
x1i=zeros(3,1);x2i=x1i;x3i=x2i;x1i_1=x1i;x2i_1=x2i;x3i_1=x3i; %隐含层输入 %权值初始化
k0=0.03; %第一层权值
w11=k0*rand(3,2);
w12=k0*rand(3,2);
w13=k0*rand(3,2);
%第二层权值
w21=k0*rand(1,9);
w22=k0*rand(1,9);
w23=k0*rand(1,9); %值限定
ynmax=1;ynmin=-1; %系统输出值限定
xpmax=1;xpmin=-1; %P节点输出限定
qimax=1;qimin=-1; %I节点输出限定
qdmax=1;qdmin=-1; %D节点输出限定
uhmax=1;uhmin=-1; %输出结果限定
6.3.2 优化
%% 网络迭代优化
for k=1:1:300 %% 控制量输出计算
%--------------------------------网络前向计算-------------------------- %系统输出
y1(k)=(0.4*y_1(1)+u_1(1)/(1+u_1(1)^2)+0.2*u_1(1)^3+0.5*u_1(2))+0.3*y_1(2);
y2(k)=(0.2*y_1(2)+u_1(2)/(1+u_1(2)^2)+0.4*u_1(2)^3+0.2*u_1(1))+0.3*y_1(3);
y3(k)=(0.3*y_1(3)+u_1(3)/(1+u_1(3)^2)+0.4*u_1(3)^3+0.4*u_1(2))+0.3*y_1(1); r1(k)=0.7;r2(k)=0.4;r3(k)=0.6; %控制目标 %系统输出限制
yn=[y1(k),y2(k),y3(k)];
yn(yn>ynmax)=ynmax;
yn(yn<ynmin)=ynmin; %输入层输出
x1o=[r1(k);yn(1)];x2o=[r2(k);yn(2)];x3o=[r3(k);yn(3)]; %隐含层
x1i=w11*x1o;
x2i=w12*x2o;
x3i=w13*x3o; %比例神经元P计算
xp=[x1i(1),x2i(1),x3i(1)];
xp(xp>xpmax)=xpmax;
xp(xp<xpmin)=xpmin;
qp=xp;
h1i(1)=qp(1);h2i(1)=qp(2);h3i(1)=qp(3); %积分神经元I计算
xi=[x1i(2),x2i(2),x3i(2)];
qi_1=[h1i(2),h2i(2),h3i(2)];
qi=qi_1+xi;
qi(qi>qimax)=qimax;
qi(qi<qimin)=qimin;
h1i(2)=qi(1);h2i(2)=qi(2);h3i(2)=qi(3); %微分神经元D计算
xd=[x1i(3),x2i(3),x3i(3)];
xd_1=[x1i_1(3),x2i_1(3),x3i_1(3)];
qd=xd-xd_1;
qd(qd>qdmax)=qdmax;
qd(qd<qdmin)=qdmin;
h1i(3)=qd(1);h2i(3)=qd(2);h3i(3)=qd(3); %输出层计算
wo=[w21;w22;w23];
qo=[h1i',h2i',h3i'];qo=qo';
uh=wo*qo;
uh(uh>uhmax)=uhmax;
uh(uh<uhmin)=uhmin;
u1(k)=uh(1);u2(k)=uh(2);u3(k)=uh(3); %控制律 %% 网络权值修正
%---------------------网络反馈修正---------------------- %计算误差
error=[r1(k)-y1(k);r2(k)-y2(k);r3(k)-y3(k)];
error1(k)=error(1);error2(k)=error(2);error3(k)=error(3);
J(k)=(error(1)^2+error(2)^2+error(3)^2); %调整大小
ypc=[y1(k)-y_1(1);y2(k)-y_1(2);y3(k)-y_1(3)];
uhc=[u_1(1)-u_2(1);u_1(2)-u_2(2);u_1(3)-u_2(3)]; %隐含层和输出层权值调整 %调整w21
Sig1=sign(ypc./(uhc(1)+0.00001));
dw21=sum(error.*Sig1)*qo';
w21=w21+rate2*dw21; %调整w22
Sig2=sign(ypc./(uh(2)+0.00001));
dw22=sum(error.*Sig2)*qo';
w22=w22+rate2*dw22; %调整w23
Sig3=sign(ypc./(uh(3)+0.00001));
dw23=sum(error.*Sig3)*qo';
w23=w23+rate2*dw23; %输入层和隐含层权值调整
delta2=zeros(3,3);
wshi=[w21;w22;w23];
%调整w11
for t=1:1:3
delta2(1:3,t)=error(1:3).*sign(ypc(1:3)./(uhc(t)+0.00000001));
end
for j=1:1:3
sgn(j)=sign((h1i(j)-h1i_1(j))/(x1i(j)-x1i_1(j)+0.00001));
end s1=sgn'*[r1(k),y1(k)];
wshi2_1=wshi(1:3,1:3);
alter=zeros(3,1);
dws1=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter(j)=alter(j)+delta2(p,:)*wshi2_1(:,j);
end
end for p=1:1:3
dws1(p,:)=alter(p)*s1(p,:);
end
w11=w11+rate1*dws1; %调整w12
for j=1:1:3
sgn(j)=sign((h2i(j)-h2i_1(j))/(x2i(j)-x2i_1(j)+0.0000001));
end
s2=sgn'*[r2(k),y2(k)];
wshi2_2=wshi(:,4:6);
alter2=zeros(3,1);
dws2=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter2(j)=alter2(j)+delta2(p,:)*wshi2_2(:,j);
end
end
for p=1:1:3
dws2(p,:)=alter2(p)*s2(p,:);
end
w12=w12+rate1*dws2; %调整w13
for j=1:1:3
sgn(j)=sign((h3i(j)-h3i_1(j))/(x3i(j)-x3i_1(j)+0.0000001));
end
s3=sgn'*[r3(k),y3(k)];
wshi2_3=wshi(:,7:9);
alter3=zeros(3,1);
dws3=zeros(3,2);
for j=1:1:3
for p=1:1:3
alter3(j)=(alter3(j)+delta2(p,:)*wshi2_3(:,j));
end
end
for p=1:1:3
dws3(p,:)=alter2(p)*s3(p,:);
end
w13=w13+rate1*dws3; %参数更新
u_2=u_1;u_1=uh;
y_2=y_1;y_1=yn;
h1i_1=h1i;h2i_1=h2i;h3i_1=h3i;
x1i_1=x1i;x2i_1=x2i;x3i_1=x3i;
end
6.3.3 结果分析
%% 结果分析
time=0.001*(1:k);
figure(1)
subplot(3,1,1)
plot(time,r1,'r-',time,y1,'b-');
title('PID神经元网络控制','fontsize',12);
ylabel('控制量1','fontsize',12);
legend('控制目标','实际输出'); subplot(3,1,2)
plot(time,r2,'r-',time,y2,'b-'); ylabel('控制量2','fontsize',12);
legend('控制目标','实际输出');
subplot(3,1,3)
plot(time,r3,'r-',time,y3,'b-');
xlabel('时间(秒)','fontsize',12);ylabel('控制量3','fontsize',12);
legend('控制目标','实际输出');
figure(2)
plot(time,u1,'r-',time,u2,'g-',time,u3,'b');
title('PID神经网络提供给对象的控制输入');
xlabel('时间'),ylabel('被控量');
legend('u1','u2','u3');grid

figure(3)
figure(3)
plot(time,J,'r-');
axis([0,0.2,0,1]);grid
title('控制误差曲线','fontsize',12);
xlabel('时间','fontsize',12);ylabel('控制误差','fontsize',12);

6.3.4 Simulink仿真

6.4 扩展
6.4.1 增加动量项
\[\begin{array}{l}
{\omega _{jk}}(k + 1) = {\omega _{jk}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{jk}}}} + {\eta _1}[{\omega _{jk}}(k) - {\omega _{jk}}(k - 1)]\\
{\omega _{ij}}(k + 1) = {\omega _{ij}}(k) - \eta \frac{{\partial J}}{{\partial {\omega _{ij}}}} + {\eta _1}[{\omega _{ij}}(k) - {\omega _{ij}}(k - 1)]
\end{array}\]
6.4.2 神经元系数
\[\begin{array}{l}
{u_{s1}} = {k_p} \cdot ne{t_{s1}}(k)\\
{u_{s2}} = {k_i} \cdot [ne{t_{s2}}(k) + ne{t_{s2}}(k - 1)]\\
{u_{s3}} = {k_d} \cdot [ne{t_{s3}}(k) - ne{t_{s3}}(k - 1)]
\end{array}\]
6.4.3 PID神经元网络权值优化
粒子群/遗传算法——解决可能陷入局部最优的问题,改善控制效果。
MATLAB神经网络(6) PID神经元网络解耦控制算法——多变量系统控制的更多相关文章
- MATLAB神经网络原理与实例精解视频教程
教程内容:<MATLAB神经网络原理与实例精解>随书附带源程序.rar9.随机神经网络.rar8.反馈神经网络.rar7.自组织竞争神经网络.rar6.径向基函数网络.rar5.BP神经网 ...
- 《精通Matlab神经网络》例10-16的新写法
<精通Matlab神经网络>书中示例10-16,在创建BP网络时,原来的写法是: net = newff(minmax(alphabet),[S1 S2],{'logsig' 'logsi ...
- Matlab神经网络
1. <MATLAB神经网络原理与实例精解> 2. B站:https://search.bilibili.com/all?keyword=matlab&from_source=na ...
- 12.Matlab神经网络工具箱
概述: 1 人工神经网络介绍 2 人工神经元 3 MATLAB神经网络工具箱 4 感知器神经网络 5 感知器神经网络 5.1 设计实例分析 clear all; close all; P=[ ; ]; ...
- MATLAB神经网络(1)之R练习
)之R练习 将在MATLAB神经网络中学到的知识用R进行适当地重构,再写一遍,一方面可以加深理解和记忆,另一方面练习R,比较R和MATLAB的不同.如要在R中使用之前的数据,应首先在MATLAB中用w ...
- matlab神经网络实验
第0节.引例 本文以Fisher的Iris数据集作为神经网络程序的测试数据集.Iris数据集可以在http://en.wikipedia.org/wiki/Iris_flower_data_set ...
- Matlab神经网络工具箱学习之二
螃蟹的分类 这个例子的目的是根据螃蟹的品种.背壳的长宽等等属性来判断螃蟹的性别,雄性还是雌性. 训练数据一共有六个属性: species, frontallip, rearwidth, length, ...
- Matlab神经网络工具箱学习之一
1.神经网络设计的流程 2.神经网络设计四个层次 3.神经网络模型 4.神经网络结构 5.创建神经网络对象 6.配置神经网络的输入输出 7.理解神经网络工具箱的数据结构 8.神经网络训练 1.神经网络 ...
- matlab神经网络工具箱创建神经网络
为了看懂师兄的文章中使用的方法,研究了一下神经网络 昨天花了一天的时间查怎么写程序,但是费了半天劲,不能运行,百度知道里倒是有一个,可以运行的,先贴着做标本 % 生成训练样本集 clear all; ...
随机推荐
- LR及评分卡(未完成)
主要分为如下内容: 一.线性回归 二.逻辑回归 三.逻辑回归评分卡流程 一.线性回归 二.逻辑回归 在线性回归的基础上引入了sigmoid函数,Logistic回归为什么要使用sigmoid函数 三. ...
- jquery框架概览(二)
(function(window, undefined) { })(window) window对象作为参数传进闭包的好处 JavaScript 全局对象.函数以及变量均自动成为 window 对象的 ...
- 荼菜的iOS笔记--UIView的几个Block动画
前言:我的第一篇文章荼菜的iOS笔记–Core Animation 核心动画算是比较详细讲了核心动画的用法,但是如你上篇看到的,有时我们只是想实现一些很小的动画,这时再用coreAnimation就会 ...
- [LC] 48. Rotate Image
You are given an n x n 2D matrix representing an image. Rotate the image by 90 degrees (clockwise). ...
- 吴裕雄--天生自然 R语言开发学习:导入数据
2.3.6 导入 SPSS 数据 IBM SPSS数据集可以通过foreign包中的函数read.spss()导入到R中,也可以使用Hmisc 包中的spss.get()函数.函数spss.get() ...
- 2016年3月13日 FXStreet首席分析师:欧元/美元下周走势展望
FX168讯 欧元/美元在经历周初沉闷的走势之后,最终在欧洲央行出台一系列措施促进通货膨胀和经济增长之后怒涨至近一个月最高位.欧洲央行决议公布之前,投资者预期存款利率将下调10至15个基点,并可能进一 ...
- 网易与Google合作,于GDC开幕首日发布开源UI自动化测试方案
[TechWeb报道]美西时间3月19日,在GDC开幕第一天的Google开发者专场,Google发布了一款由网易研发的UI自动化测试方案:Airtest Project. Google方面评价,这可 ...
- 组合数学之Pólya计数理论
1 群 群$(G, cdot)$: 闭合, 结合律, 幺元, 逆 1.1 置换群 置换为双射$pi:[n]to [n]$, 置换之间的操作符 $cdot$ 定义为函数的复合, 即$(pi cdot s ...
- Job for network.service failed because the control process exited with error code问题
Job for network.service failed because the control process exited with error code问题 因为是克隆的,所以需要重新修改静 ...
- Redis list实现原理 - 双向循环链表
双向链表 双向表示每个节点知道自己的直接前驱和直接后继,每个节点需要三个域 查找方向可以是从左往右也可以是从右往左,但是要实现从右往左还需要终端节点的地址,所以通常会设计成双向的循环链表; 双向的循环 ...