POJ 2632:Crashing Robots
| Time Limit: 1000MS | Memory Limit: 65536K | |
| Total Submissions: 8424 | Accepted: 3648 |
Description
space with a diameter of 1 meter. Assume there are N robots, numbered from 1 through N. You will get to know the position and orientation of each robot, and all the instructions, which are carefully (and mindlessly) followed by the robots. Instructions are
processed in the order they come. No two robots move simultaneously; a robot always completes its move before the next one starts moving.
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
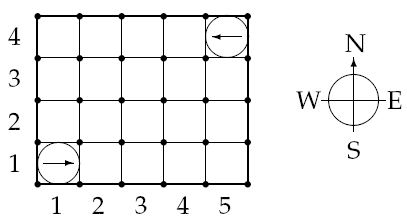
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
题意是给定一个坐标地图,给了很多个机器人的坐标和方向,有三种对机器人的操作方式,F是前进,L是向左转,R向右转。看哪一个机器人先撞墙或是撞到其他机器人。
自己需要注意两点:
1.不一定非得到操作机器人的时候才有冲突,可能在最开始的机器人拜访过程中机器人站的位置就已经重复,即冲突了。
2.R向右转,自己定义成为-1,原来自己以为负数除以数的余数会是正数,结果自己too naive了,要考虑将其变为正数。
这个题自己就注意这两点就够了,因为本身就是一个模拟的过程,跟算法也没什么关系。。。
代码:
#include <iostream>
#include <algorithm>
#include <cmath>
#include <vector>
#include <string>
#include <cstring>
#pragma warning(disable:4996)
using namespace std; struct R
{
int x;
int y;
int dir;
}Robot[110]; enum{ E,N,W,S };
enum{ L=1,R=-1};
int map_f[200][200];
int move_x[5]={1,0,-1,0};
int move_y[5]={0,1,0,-1};
int Test,X,Y,Robot_n,Q,i,flag;
string temp; void solve()
{
int cal_n,cishu,k;
string manu;
cin>>cal_n>>manu>>cishu; if(flag==0)
return; if(manu=="F")
{
map_f[Robot[cal_n].x][Robot[cal_n].y]=0; for(k=1;k<=cishu;k++)
{
Robot[cal_n].x = Robot[cal_n].x + move_x[Robot[cal_n].dir];
Robot[cal_n].y = Robot[cal_n].y + move_y[Robot[cal_n].dir]; if(Robot[cal_n].x <=0 || Robot[cal_n].y <=0 || Robot[cal_n].x >X || Robot[cal_n].y >Y)
{
flag=0;
cout<<"Robot "<<cal_n<<" crashes into the wall"<<endl;
break;
}
else if(map_f[Robot[cal_n].x][Robot[cal_n].y])
{
flag=0;
cout<<"Robot "<<cal_n<<" crashes into robot "<<map_f[Robot[cal_n].x][Robot[cal_n].y]<<endl;
break;
}
}
map_f[Robot[cal_n].x][Robot[cal_n].y]=cal_n;
}
else if(manu=="L")
{
Robot[cal_n].dir = (Robot[cal_n].dir + L*cishu)%4;
}
else if(manu=="R")
{
Robot[cal_n].dir = (Robot[cal_n].dir + (R*cishu)%4 + 4)%4;
}
} int main()
{
cin>>Test; while(Test--)
{
flag=1;
memset(map_f,0,sizeof(map_f)); cin>>X>>Y;
cin>>Robot_n>>Q; for(i=1;i<=Robot_n;i++)
{
cin>>Robot[i].x>>Robot[i].y;
if(map_f[Robot[i].x][Robot[i].y])
{
flag=0;
cout<<"Robot "<<i<<" crashes into robot "<<map_f[Robot[i].x][Robot[i].y]<<endl;
}
else
{
map_f[Robot[i].x][Robot[i].y]=i;
} cin>>temp;
if(temp=="E")
Robot[i].dir=E;
else if(temp=="N")
Robot[i].dir=N;
else if(temp=="W")
Robot[i].dir=W;
else if(temp=="S")
Robot[i].dir=S;
}
for(i=1;i<=Q;i++)
{
solve();
}
if(flag)
cout<<"OK"<<endl;
}
//system("pause");
return 0;
}
版权声明:本文为博主原创文章,未经博主允许不得转载。
POJ 2632:Crashing Robots的更多相关文章
- 模拟 POJ 2632 Crashing Robots
题目地址:http://poj.org/problem?id=2632 /* 题意:几个机器人按照指示,逐个朝某个(指定)方向的直走,如果走过的路上有机器人则输出谁撞到:如果走出界了,输出谁出界 如果 ...
- Poj OpenJudge 百练 2632 Crashing Robots
1.Link: http://poj.org/problem?id=2632 http://bailian.openjudge.cn/practice/2632/ 2.Content: Crashin ...
- POJ 2632 Crashing Robots (坑爹的模拟题)
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6599 Accepted: 2854 D ...
- Crashing Robots 分类: POJ 2015-06-29 11:44 10人阅读 评论(0) 收藏
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 8340 Accepted: 3607 D ...
- poj 2632 Crashing Robots(模拟)
链接:poj 2632 题意:在n*m的房间有num个机器,它们的坐标和方向已知,现给定一些指令及机器k运行的次数, L代表机器方向向左旋转90°,R代表机器方向向右旋转90°,F表示前进,每次前进一 ...
- poj 2632 Crashing Robots
点击打开链接 Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6655 Accepted: ...
- POJ:2632-Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Description In a modernized warehouse, robot ...
- 模拟 --- Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 7394 Accepted: 3242 D ...
- poj2632 Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 9859 Accepted: 4209 D ...
随机推荐
- maven更新JRE更改JSE1.5
1. [代码]在maven的配置文件settings.xml中的<profiles>标签里添加如下代码,设置默认JRE编译版本为1.7 <profile> <id> ...
- require - 引入文件
导入 /** * Creates the node for the load command. Only used in browser envs. */ req.createNode = funct ...
- class中static总结-静态成员函数和静态成员变量
C++规定const静态类成员可以直接初始化,其他非const的静态类成员需要在类声明以外初始化,我们一般选择在类的实现文件中初始化,初始化的方式是书写一遍类型的定义: //A.cpp ); //使用 ...
- 剑指offer 二叉树的后序遍历序列
题目描述 输入一个整数数组,判断该数组是不是某二叉搜索树的后序遍历的结果.如果是则输出Yes,否则输出No.假设输入的数组的任意两个数字都互不相同. 思路:这题目有点特殊,主要在于序列为空的时候,不是 ...
- 深度学习Tensorflow框架的安装
选择下载安装Anaconda3.4.2.0-python3.5版本安装(3.6版本不适合后面opencv-python的安装): 打开Anaconda Prompt命令窗口编辑界面(黑窗口),输入py ...
- 106、Java中String类之使用contains()方法判断子字符串是否存在
01.代码如下: package TIANPAN; /** * 此处为文档注释 * * @author 田攀 微信382477247 */ public class TestDemo { public ...
- 085、Java数组之实现排序
01.代码如下: package TIANPAN; /** * 此处为文档注释 * * @author 田攀 微信382477247 */ public class TestDemo { public ...
- 小程序父子组件onLoad和Created之间的问题
今天开发日历插件时,遇到了以下问题: 因为需要在父组件的onLoad里加载接口从而得到每一天的房间数据,然后将数据存进小程序缓存. 接着在子组件里 获取小程序缓存来得到父组件传来的房间数据,在子组件里 ...
- Eclipse创建一个动态maven项目详细步骤
新建maven项目,new一个Dynamic Web Project 项目 输入完项目名直接finish 配maven,右键项目configure,选择Convert to Plug-in Proje ...
- HDU 3065 病毒侵袭持续中 (模板题)
病毒侵袭持续中 Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Sub ...