POJ 2632:Crashing Robots
| Time Limit: 1000MS | Memory Limit: 65536K | |
| Total Submissions: 8424 | Accepted: 3648 |
Description
space with a diameter of 1 meter. Assume there are N robots, numbered from 1 through N. You will get to know the position and orientation of each robot, and all the instructions, which are carefully (and mindlessly) followed by the robots. Instructions are
processed in the order they come. No two robots move simultaneously; a robot always completes its move before the next one starts moving.
A robot crashes with a wall if it attempts to move outside the area of the warehouse, and two robots crash with each other if they ever try to occupy the same spot.
Input
The second line contains two integers, 1 <= N, M <= 100, denoting the numbers of robots and instructions respectively.
Then follow N lines with two integers, 1 <= Xi <= A, 1 <= Yi <= B and one letter (N, S, E or W), giving the starting position and direction of each robot, in order from 1 through N. No two robots start at the same position.
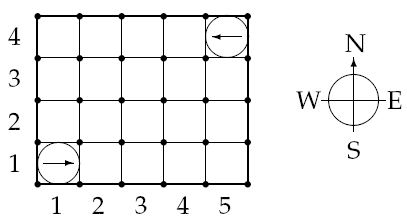
Figure 1: The starting positions of the robots in the sample warehouse
Finally there are M lines, giving the instructions in sequential order.
An instruction has the following format:
< robot #> < action> < repeat>
Where is one of
- L: turn left 90 degrees,
- R: turn right 90 degrees, or
- F: move forward one meter,
and 1 <= < repeat> <= 100 is the number of times the robot should perform this single move.
Output
- Robot i crashes into the wall, if robot i crashes into a wall. (A robot crashes into a wall if Xi = 0, Xi = A + 1, Yi = 0 or Yi = B + 1.)
- Robot i crashes into robot j, if robots i and j crash, and i is the moving robot.
- OK, if no crashing occurs.
Only the first crash is to be reported.
Sample Input
4
5 4
2 2
1 1 E
5 4 W
1 F 7
2 F 7
5 4
2 4
1 1 E
5 4 W
1 F 3
2 F 1
1 L 1
1 F 3
5 4
2 2
1 1 E
5 4 W
1 L 96
1 F 2
5 4
2 3
1 1 E
5 4 W
1 F 4
1 L 1
1 F 20
Sample Output
Robot 1 crashes into the wall
Robot 1 crashes into robot 2
OK
Robot 1 crashes into robot 2
题意是给定一个坐标地图,给了很多个机器人的坐标和方向,有三种对机器人的操作方式,F是前进,L是向左转,R向右转。看哪一个机器人先撞墙或是撞到其他机器人。
自己需要注意两点:
1.不一定非得到操作机器人的时候才有冲突,可能在最开始的机器人拜访过程中机器人站的位置就已经重复,即冲突了。
2.R向右转,自己定义成为-1,原来自己以为负数除以数的余数会是正数,结果自己too naive了,要考虑将其变为正数。
这个题自己就注意这两点就够了,因为本身就是一个模拟的过程,跟算法也没什么关系。。。
代码:
#include <iostream>
#include <algorithm>
#include <cmath>
#include <vector>
#include <string>
#include <cstring>
#pragma warning(disable:4996)
using namespace std; struct R
{
int x;
int y;
int dir;
}Robot[110]; enum{ E,N,W,S };
enum{ L=1,R=-1};
int map_f[200][200];
int move_x[5]={1,0,-1,0};
int move_y[5]={0,1,0,-1};
int Test,X,Y,Robot_n,Q,i,flag;
string temp; void solve()
{
int cal_n,cishu,k;
string manu;
cin>>cal_n>>manu>>cishu; if(flag==0)
return; if(manu=="F")
{
map_f[Robot[cal_n].x][Robot[cal_n].y]=0; for(k=1;k<=cishu;k++)
{
Robot[cal_n].x = Robot[cal_n].x + move_x[Robot[cal_n].dir];
Robot[cal_n].y = Robot[cal_n].y + move_y[Robot[cal_n].dir]; if(Robot[cal_n].x <=0 || Robot[cal_n].y <=0 || Robot[cal_n].x >X || Robot[cal_n].y >Y)
{
flag=0;
cout<<"Robot "<<cal_n<<" crashes into the wall"<<endl;
break;
}
else if(map_f[Robot[cal_n].x][Robot[cal_n].y])
{
flag=0;
cout<<"Robot "<<cal_n<<" crashes into robot "<<map_f[Robot[cal_n].x][Robot[cal_n].y]<<endl;
break;
}
}
map_f[Robot[cal_n].x][Robot[cal_n].y]=cal_n;
}
else if(manu=="L")
{
Robot[cal_n].dir = (Robot[cal_n].dir + L*cishu)%4;
}
else if(manu=="R")
{
Robot[cal_n].dir = (Robot[cal_n].dir + (R*cishu)%4 + 4)%4;
}
} int main()
{
cin>>Test; while(Test--)
{
flag=1;
memset(map_f,0,sizeof(map_f)); cin>>X>>Y;
cin>>Robot_n>>Q; for(i=1;i<=Robot_n;i++)
{
cin>>Robot[i].x>>Robot[i].y;
if(map_f[Robot[i].x][Robot[i].y])
{
flag=0;
cout<<"Robot "<<i<<" crashes into robot "<<map_f[Robot[i].x][Robot[i].y]<<endl;
}
else
{
map_f[Robot[i].x][Robot[i].y]=i;
} cin>>temp;
if(temp=="E")
Robot[i].dir=E;
else if(temp=="N")
Robot[i].dir=N;
else if(temp=="W")
Robot[i].dir=W;
else if(temp=="S")
Robot[i].dir=S;
}
for(i=1;i<=Q;i++)
{
solve();
}
if(flag)
cout<<"OK"<<endl;
}
//system("pause");
return 0;
}
版权声明:本文为博主原创文章,未经博主允许不得转载。
POJ 2632:Crashing Robots的更多相关文章
- 模拟 POJ 2632 Crashing Robots
题目地址:http://poj.org/problem?id=2632 /* 题意:几个机器人按照指示,逐个朝某个(指定)方向的直走,如果走过的路上有机器人则输出谁撞到:如果走出界了,输出谁出界 如果 ...
- Poj OpenJudge 百练 2632 Crashing Robots
1.Link: http://poj.org/problem?id=2632 http://bailian.openjudge.cn/practice/2632/ 2.Content: Crashin ...
- POJ 2632 Crashing Robots (坑爹的模拟题)
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6599 Accepted: 2854 D ...
- Crashing Robots 分类: POJ 2015-06-29 11:44 10人阅读 评论(0) 收藏
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 8340 Accepted: 3607 D ...
- poj 2632 Crashing Robots(模拟)
链接:poj 2632 题意:在n*m的房间有num个机器,它们的坐标和方向已知,现给定一些指令及机器k运行的次数, L代表机器方向向左旋转90°,R代表机器方向向右旋转90°,F表示前进,每次前进一 ...
- poj 2632 Crashing Robots
点击打开链接 Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 6655 Accepted: ...
- POJ:2632-Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Description In a modernized warehouse, robot ...
- 模拟 --- Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 7394 Accepted: 3242 D ...
- poj2632 Crashing Robots
Crashing Robots Time Limit: 1000MS Memory Limit: 65536K Total Submissions: 9859 Accepted: 4209 D ...
随机推荐
- robotframework+appium 实现App自动化值环境搭建(一)
第一步: Cmd命令输入pip install robotframework-appiumlibrary 下载和导入appiumlibrary 第二步: 安装JDK,附件有JDK1.8安装包 第三步 ...
- 移动端触摸touchstart监听事件
click.mousedown等事件适用于PC端,在移动端会有一定时间的延迟,所以更好的优化移动端体验,要用touch事件, 1.首先要添加一个监听事件,监听移动端行为 element.addEven ...
- [LuoguP1203][USACO1.1]P1203 Broken Necklace
Solution 这道题数据规模奇小,因此大部分人都使用了暴力搜索的方法,这也是我一开始的想法. 对于 100100%100 的数据,3≤n≤3503≤n≤3503≤n≤350 的确可以如此,但暴力搜 ...
- Maven项目- get请求的乱码问题,使用tamcat7出现乱码的解决方法
get请求的乱码问题: 解决方法: 手动处理编码
- 使用JavaScript和Canvas打造真实的雨滴效果
使用JavaScript和Canvas打造真实的雨滴效果 寸志 · 1 年前 我最近搞了一个有趣的项目——rainyday.js .我认为这个项目并不怎么样,而且,事实上这是我第一次尝试接触一些比弹窗 ...
- php 打印格式化显示利器 <pre>
当我们PHP调试的时候,用var_dump 或 print_r打印json数据或array数组时,html页面没有换行显示,看到的内容一大堆,不好定位. 输出前添加 <pre>,便可以自动 ...
- Eclipse设置自动提示代码(不用alt+/了)
在preferences找到如图的相关位置.在输入框里把26个字母加进去,qwer...........
- 深入解读EOS源代码之——区块链内核
EOS进入大众视野并且受到热议已经有一段时间了,各种热捧和争议过后,是时候让我们静下来搞清楚EOS到底是一个什么样的产品.本文从技术角度深入的分析EOS底层设计,从源代码入手,一层层揭开EOS区块链底 ...
- 第1节 IMPALA:6、yum源制作过程
impala的安装:第一步:下载5个G的安装包,并且上传linux,解压第二步:安装httpd的服务,并启动,访问httpd就是访问我们linux的 /var/www/html这个路径下面的东西第三步 ...
- Easy_Re
这题比较简单,一波常规的操作之后直接上ida(小白的常规操作在以前的博客里都有所以这里不在赘述了),ida打开之后查看一下, 这里应该就是一个入口点了,接着搜索flag字符串, 上面的黄色的部分转换成 ...