转载泡泡机器人——IMU预积分总结与公式推导1
IMU预积分技术最早由T Lupton于12年提出[1],C Forster于15年[2][3][4]将其进一步拓展到李代数上,形成了一套优雅的理论体系。Forster将IMU预积分在开源因子图优化库GTSAM中进行了实现,并完成了和其另一大作SVO的组合。这套理论目前已经被广泛的应用在基于Bundle Adjustment优化框架的Visual Inertial Odometry中。其中包括VI-ORBSLAM,港科大VINS,浙大ICE-BA等。
本报告对Foster的paper[3][4]中的公式进行了详尽的推导,试图将这套优雅的理论详细地展现在读者面前,使读者对IMU预积分理论有更加完备的认识。
为了更好的理解本系列报告,推荐另外三本参考书幕[5][6][7]。
本系列报告中公式较为繁多,因此篇幅较长,将分为四篇进行推送。这是本系列的第一篇。公式中各种上下标较多,笔者已尽量做到没有错误,但难免仍有疏漏,如有任何疑问、建议或需进行探讨,请联系笔者,邮箱地址附于文末。



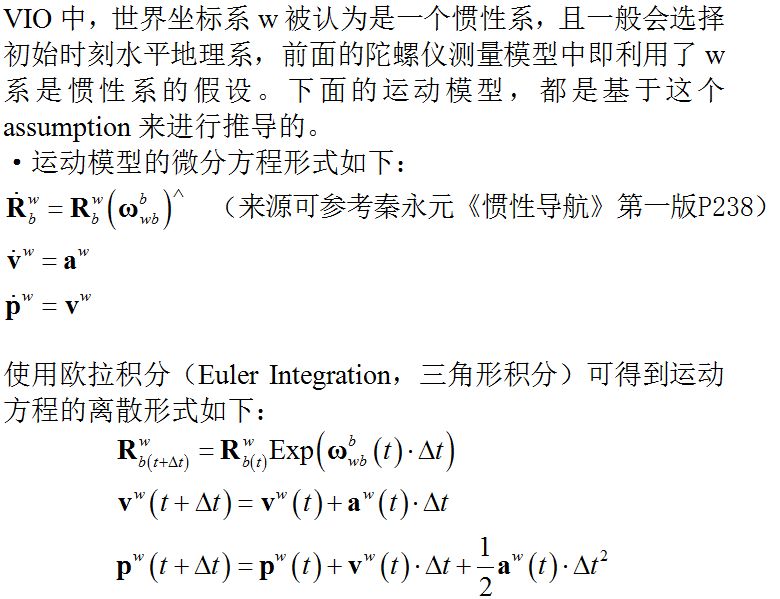
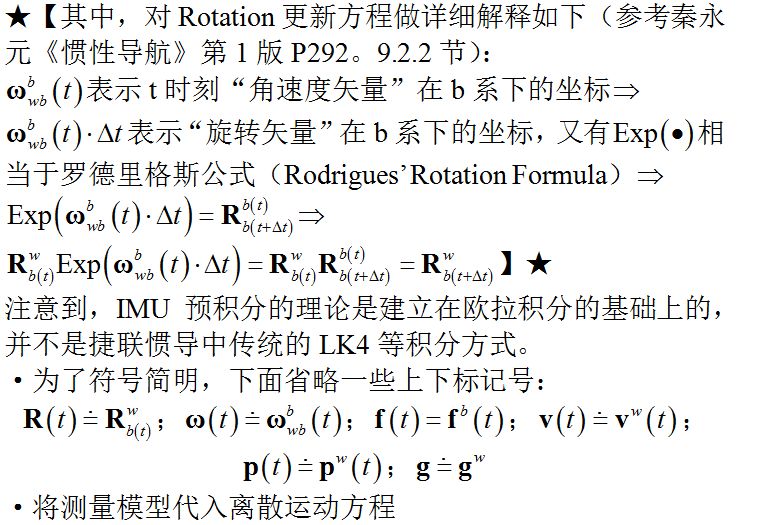
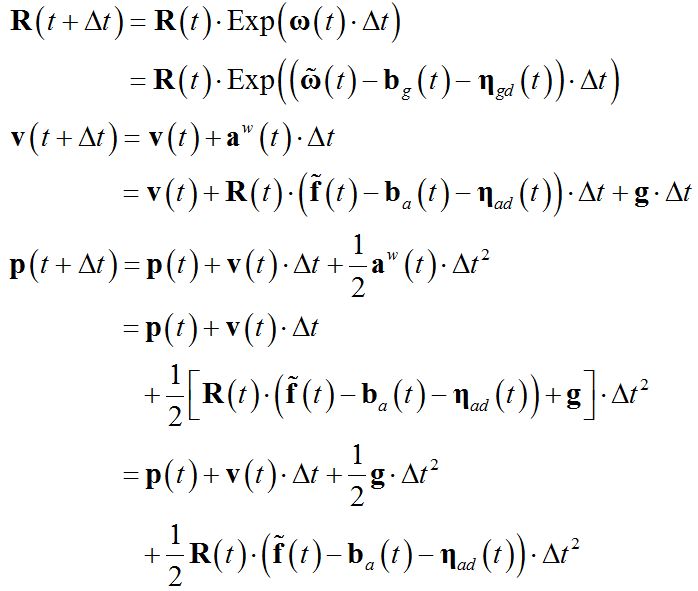
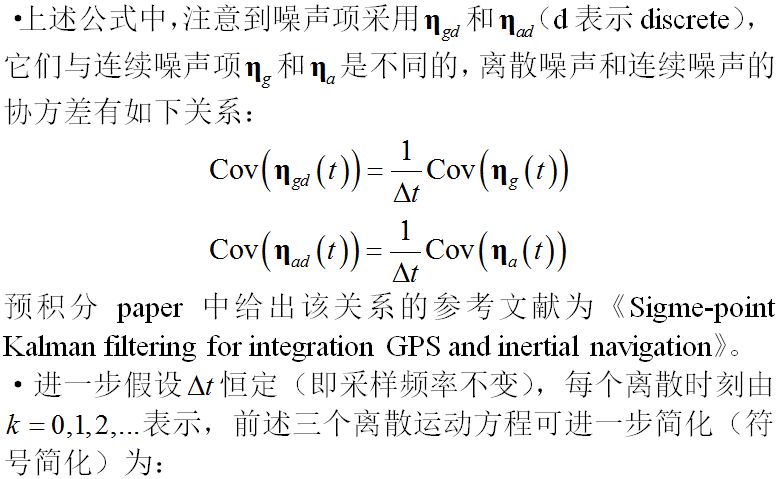
本期首先介绍了一些李代数知识,然后介绍了IMU预积分理论采用的IMU测量模型。这些知识将在后面的推导中被频繁的运用。
转载泡泡机器人——IMU预积分总结与公式推导1的更多相关文章
- 转载泡泡机器人——IMU预积分总结与公式推导2
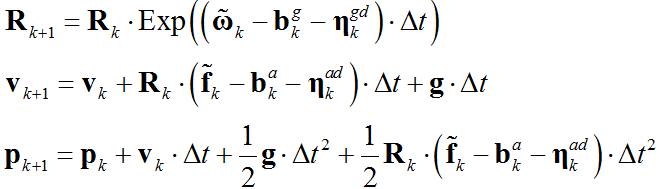
本文为IMU预积分总结与公式推导系列技术报告的第二篇. 承接第一篇的内容,本篇将推导IMU预积分的测量值,并分析其测量误差的分布形式. 传统捷联惯性导航的递推算法,以初始状态为基础,利用IMU测量得到 ...
- IMU 预积分推导
给 StereoDSO 加 IMU,想直接用 OKVIS 的代码,但是有点看不懂.知乎上郑帆写的文章<四元数矩阵与 so(3) 左右雅可比>提到 OKVIS 的预积分是使用四元数,而预积分 ...
- VINS(七)estimator_node 数据对齐 imu预积分 vision
首先通过vins_estimator mode监听几个Topic(频率2000Hz),将imu数据,feature数据,raw_image数据(用于回环检测)通过各自的回调函数封装起来 ros::Su ...
- VINS(三)IMU预积分
IMU的数据频率一般远高于视觉,在视觉两帧k,k+1之间通常会有>10组IMU数据.IMU的数据通过积分,可以获取当前位姿(p位置,q四元数表达的姿态).瞬时速度等参数. 在VIO中,如果参考世 ...
- IMU预积分
https://www.sohu.com/a/242760307_715754 http://www.sohu.com/a/243155537_715754 https://www.sohu.com/ ...
- [转载]在线文档预览方案-Office Web Apps
最近在做项目时,要在手机端实现在线文档预览的功能.于是百度了一下实现方案,大致是将文档转换成pdf,然后在通过插件实现预览.这些方案没有具体实现代码,也没有在线预览的地址,再加上项目时间紧迫.只能考虑 ...
- 泡泡机器人SLAM 2019
LDSO:具有回环检测的直接稀疏里程计:LDSO:Direct Sparse Odometry with Loop Closure Abstract—In this paper we present ...
- 分享| 语义SLAM的未来与思考(泡泡机器人)
相比典型的点云地图,语义地图能够很好的表示出机器人到的地方是什么,机器人“看”到的东西是什么.比如进入到一个房间,点云地图中,机器人并不能识别显示出来的一块块的点云到底是什么,但是语义地图的构建可以分 ...
- 【转载】C/C++预处理器
转自:http://www.cnblogs.com/lidabo/archive/2012/08/27/2658909.html C/C++编译系统编译程序的过程为预处理.编译.链接.预处理器是在程序 ...
随机推荐
- 多线程协作wait、notify、notifyAll方法简介理解使用 多线程中篇(十四)
在锁与监视器中有对wait和notify以及notifyAll进行了简单介绍 所有对象都有一个与之关联的锁与监视器 wait和notify以及notifyAll之所以是Object的方法就是因为任何一 ...
- qutebrowser 只用键盘操作的浏览器
一个 Qt 库制作的最简化浏览器,内核是 Chromium.最大特点就是它自带命令行,可以完全用键盘操作. 下载地址: 链接:https://share.weiyun.com/5Y2Ajvn 密码:m ...
- c# 解决Randoms伪随机重复问题
/// <summary> /// 解决伪随机问题 /// </summary> public static void Random() { ; ; i < ; i++) ...
- Spring RestTemplate详解
Spring RestTemplate详解 1.什么是REST? REST(RepresentationalState Transfer)是Roy Fielding 提出的一个描述互联系统架构风格 ...
- 15个常用的javaScript正则表达式
1 用户名正则 //用户名正则,4到16位(字母,数字,下划线,减号) ,}$/; //输出 true console.log(uPattern.test("iFat3")); 2 ...
- ecstore中怎样使用ajax提交数据
//javascript代码 $$(".bb").addEvent('change',function(e){ var order_item_id = this.get('orde ...
- CSS3文字与字体 text-overflow 与 word-wrap
text-overflow 对象内的文本溢出部分采用省略“...”标记 或者 剪切: text-overflow:elip(超出容器边界的内容剪切掉) | ellipsis(超出容器边界内容省略标示 ...
- 章节十、4-CSS Classes---用多个CSS Classes定位元素
以下演示操作以该网址中的输入框为例:https://learn.letskodeit.com/p/practice 一.使用input[class=inputs]验证元素是否唯一 注意:使用“clas ...
- 随机IP
function rand_ip(){ $ip_longs = array( array('607649792', '608174079'), //36.56.0.0-36.63.255 ...
- ERROR:"org.apache.zookeeper.KeeperException$NoAuthException: KeeperErrorCode = NoAuth for /config/topics/test" when creating or deleting Kafka operations authorized through the Ranger policies
PROBLEM DESCRIPTION When creating or deleting topics in Kafka, they cannot be authorized through the ...