APM飞控的使用心得
硬件资源:APM,F450四轴机架,大疆电调和电机,富斯i6控和接收机。
刚开始的步骤都是大同小异,首先可以按照这个链接上面的步骤一步步的执行:http://tieba.baidu.com/p/2974250475
当然,很多人可能会看到泡泡老师的教学视屏,但是他使用的是天地飞的控,对于富斯的控网上资料就比较少了。但是还是很少,这里还有一个:https://tieba.baidu.com/p/4524252944?red_tag=1024383346
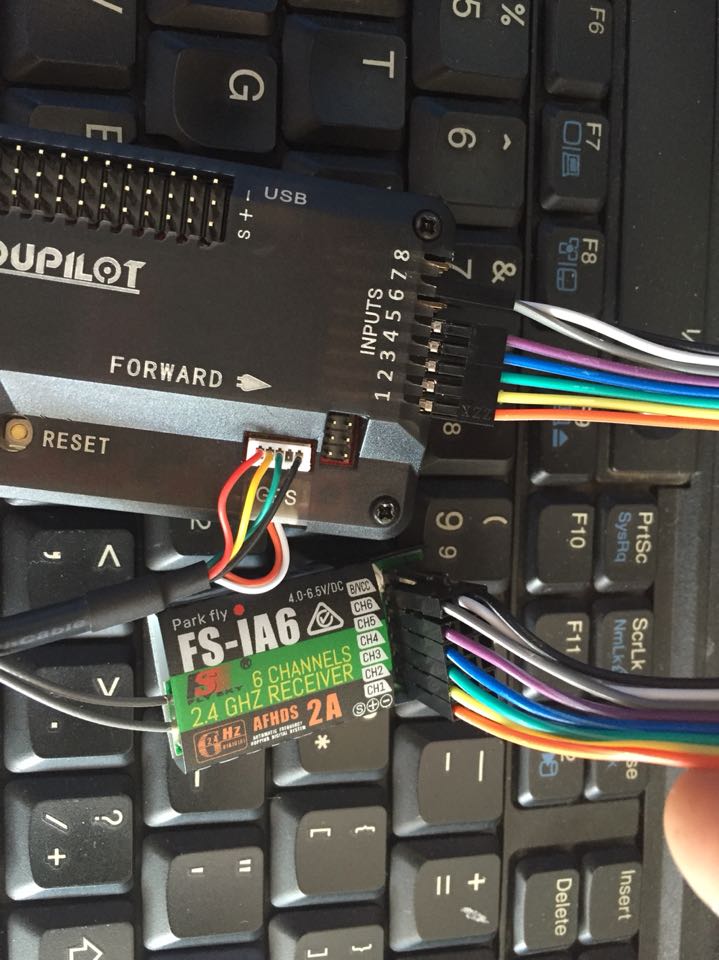
这里 是连接 示意图:
在执行上面的步骤的时候每个人都遇到各种各样的的问题。我就出现了很多。有时候地面站Mission Planner会出问题,就是无法从网络上获取最新的固件资料,这个时候你可以自己先从网上下载好自己需要的固件,然后在地面站里面选择“加载自定义固件”就可以了。至于固件资料,可以去github里面下载。但是要注意版本。一般刷固件的时间不是很长,等下面的进度条走完之后,在等个大概一两分钟就行了。固件加载成功后,就可以点击地面站右上角的connect连接APM,查看实时运行姿态和数据了。如果能查看实时数据,说明固件已经加载成功。其实加载固件就是我们平时给单片机下载程序嘛,你看固件都是.HEX文件,就是程序生成的下载文件嘛。通过USB串口下载。地面站就充当了一个程序下载器和上位机的作用。
然后就是遥控器、加速度计和罗盘的校准。
在进行遥控器校准的时候一定要对自己的遥控器熟悉,知道你的哪个摇杆对应你的接收机上的哪个通道,还要注意你接收机的这个通道连接到了APM 的哪个通道上了。这些在刚开始的都要弄清楚,最好自己先找个纸记下来,避免弄乱。
JP1短接之后就是由电调或者PM接口给飞控供电,也给接收机供电。拔掉之后是外部供电。
我用的是富斯i6控和接收机,昨天还好好的,今天给我的遥控器里面的模型改了一个名字 就发现遥控器和接收机无法连接了(也可能是其他原因),这时无法连接接收机上面的LED显示一直慢闪,表示接收机无法和遥控器连接。这时可以连接接收机的对码线(就是bat口的信号线和地线连接),然后按住遥控器的对码按键开机即可。当LED常亮的时候表示对码成功。
APM的解锁动作是以检测到第三通道最低值+第四通道最高值为标准的,即油门最低,方向最右。所以无论你是左手油门还是右手油门,只要你操作摇杆使油门最低,方向摇杆最右(pwm值最大)即可执行APM的解锁动作。当APM收到解锁信号后,APM会先自检,蓝灯开始闪烁,自检通过,解锁成功,红灯常亮(地面站中红色DISARMED会变成ARMED),表示解锁成功。此过程会持续5秒,所以解锁时请保持油门最低,方向最大的动作5秒以上。需要注意的是:APM解锁以后,15秒内没有任何操作,它会自动上锁。手动上锁方法:油门最低,方向最左(PWM最低)。
2017.11.11上午:
到此为止,基本上没有遇到什么大的问题,参数以及校准工作基本完成。接下来就是实际测试了。
3s航模电池注意事项:
长时间不用,很多常识都忘完了。今天就记录一下,备忘!
首先,3s航模电池是由3块锂电池组合而成的,每块电池的充电最高电压为4.25V,最低电压2.75V(一直以为 是3.5,其实是2.75)。也就是说你的3s电池的最高电压不要超过12.75V,最低不要低于8.25V,不然很容易过冲或者过放减小电池寿命。正常情况下,电池电压不应低于11.1V,不要高于12.7V!!
电池不要长期放置,定期给电池充电,保养电池。毕竟100多一块呢。
下午:
飞控装上F450机架,由于我使用的是大疆的电调,不带BEC,所以外部扩展一个稳压模块通过PM接口单独给飞控供电。安装完毕之后就可以进行小心的调试。
全家福:

APM飞控的使用心得的更多相关文章
- APM飞控修改数传模块方法
APM飞控修改数传模块方法 硬件 ARDUCOPTER第二代 数传模块(USB接口) 数传模块(telem接口) usb-ttl模块 修改方法 注意:APM固件版本和数传模块估计版本是分开的,但有一定 ...
- 多轴APM飞控调参
调参步骤: 遥控器,电动机和电调对应的APM飞控连线——遥控器校准——电调行程校准——加速度计校准——磁罗盘校准——故障保护设定(遥控器和飞控)——飞行模式设定并调整——自动调参设定选项 APM飞控调 ...
- APM飞控系统详细介绍
APM飞控系统详细介绍2013-04-05 12:28:24 来源: 评论:2 点击:10303 APM飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器.在此我 ...
- apm飞控飞行模式详解
1.稳定模式Stabilize稳定模式是使用得最多的飞行模式,也是最基本的飞行模式,起飞和降落都应该使用此模式.此模式下,飞控会让飞行器保持稳定,是初学者进行一般飞行的首选,也是FPV第一视角飞行的最 ...
- APM飞控学习之路的资料
飞控学习之路的资料 https://blog.csdn.net/u010682510 博客资料 https://blog.csdn.net/qq_26573899/article/category/7 ...
- apm固定翼调试方法
APM飞控传说是大神的神器新手的噩梦,APM是个便宜又好用的飞控~刚开始给我的天行者X5按APM飞控的时候也查询搜索了很多,参数值,修改和混控和混控量的修改翻遍了资料发现咱们论坛教程比较少,所以开帖总 ...
- APM的3DR无线数传的安装和调试
APM飞控修改数传模块方法 http://www.cnblogs.com/wsine/p/4909903.html APM的3DR无线数传的安装和调试 http://tieba.baidu.com/p ...
- 极客DIY:使用树莓派制作一架四轴无人机
如果你想DIY一台属于自己的无人机,那么接下来可以阅读这篇文章,阅读完毕之后也许对你会有启发. 这个项目主要用到的零件主要来自Erle Robotics(一个使用Linux系统的开源四轴飞行器项目). ...
- STM32作为主设备,Arduino作为从设备进行IIC通讯的注意要点
近日公司的项目重心要往米思齐的Arduino图形化编程上转移了,需要我将STM32和Arduino的IIC通讯调通.之前Arduino并没怎么使用过,仅仅是将超声波的代码移植成TOF激光测距而已.网上 ...
随机推荐
- springmvc 文件下载
1.使用servlet的API实现 参考:http://my.oschina.net/u/1394615/blog/311307 @RequestMapping("/download&quo ...
- QT中C++与Html端通信例子
C++(服务端)和HTML(客户端)通过websocket通信,通过qwebchannel.js实现 C++ -> HTML,通过信号. HTML -> C++,直接调用函数. Main函 ...
- symfony window下的安装 安装时候出现的问题以及解决方案
1. cmd进入DOS , cd 到 php.exe 的目录下 2. php -r "readfile('http://symfony.com/installer');&q ...
- mysql中查看数据库的版本,什么版本
需求:查看当前使用的数据库是哪个版本的,什么版本 select version(); 查询结果: 备注:通过version()函数查询出来当前使用的数据库版本是5.5.57-log 文档创建时间:20 ...
- [原]IOS 设备基本信息
1.获取设备类型 (Iphone/ipad 几?) #import "sys/utsname.h" -(NSString*)getDeviceVersion{ struct ...
- [转]mac osx 下的apt-get,yum的代替工具 ----homebrew
原文地址:http://blog.csdn.net/tsxw24/article/details/15500517 linux下有很方便的包管理器如:apt-get.yum,mac下也有类似的工具:H ...
- jQuery Colorbox弹窗插件使用教程小结、属性设置详解以及colorbox关闭
jQuery Colorbox是一款弹出层,内容播放插件,效果极佳,当然我主要是用来弹出图片啦. jQuery Colorbox不仅有弹性动画效果,淡入淡出效果,幻灯片播放,宽度自定义,还能够ajax ...
- python --help查询python相关命令
C:\Users\lenovo>python --help usage: python [option] ... [-c cmd | -m mod | file | -] [arg] ... O ...
- apt-get/dpkg常用指令备查
apt-get install <package> Downloads <package> and all of its dependencies, and installs ...
- AESDK开发之UI消息响应
UI创建: 在该入口下 case PF_Cmd_PARAMS_SETUP: //.... break; 必须在末尾指定UI数目,UI数目一般是枚举,如果和枚举长度不一致也会报错.所以最好是直接修改枚举 ...