【python-opencv】18-图像梯度+图像边界
效果图:
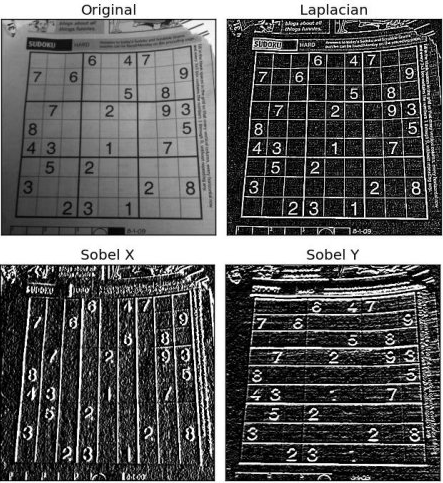
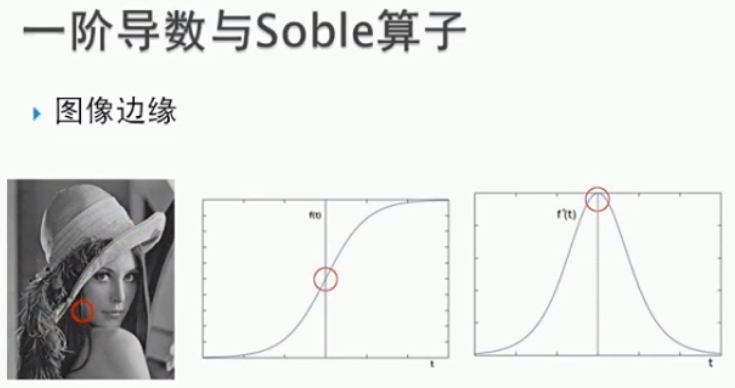
*一阶导数与Soble算子
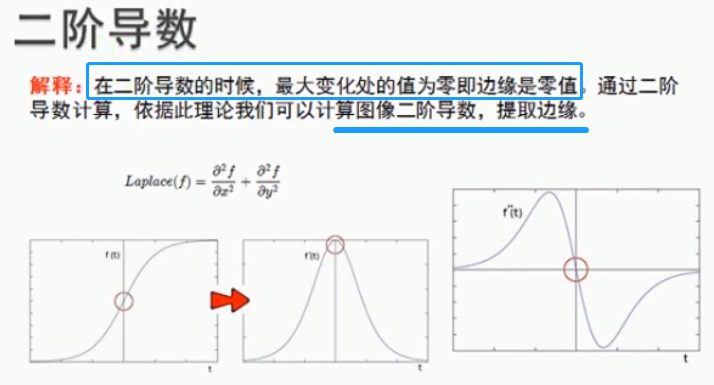
*二阶导数与拉普拉斯算子

定义:把图片想象成连续函数,因为边缘部分的像素值是与旁边像素明显有区别的,所以对图片局部求极值,就可以得到整幅图片的边缘信息了。
不过图片是二维的离散函数,图像梯度其实就是这个二维离散函数的求导。
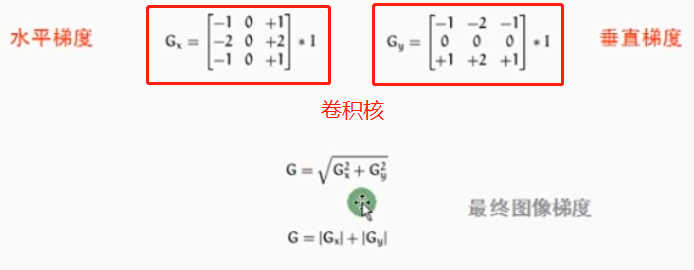
Sobel算子是普通一阶差分,是基于寻找梯度强度。
拉普拉斯算子(二阶差分)是基于过零点检测。通过计算梯度,设置阀值,得到边缘图像。
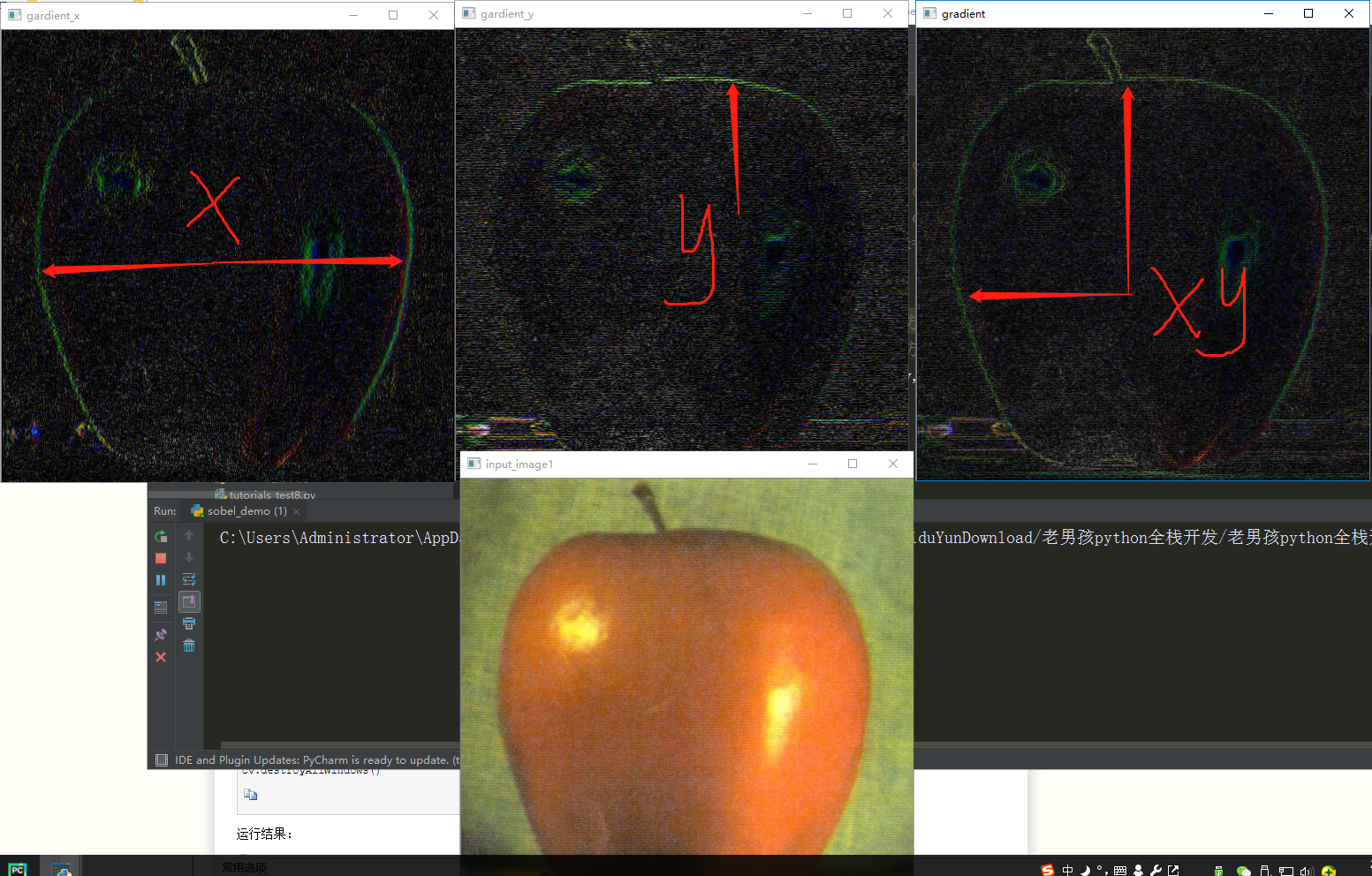
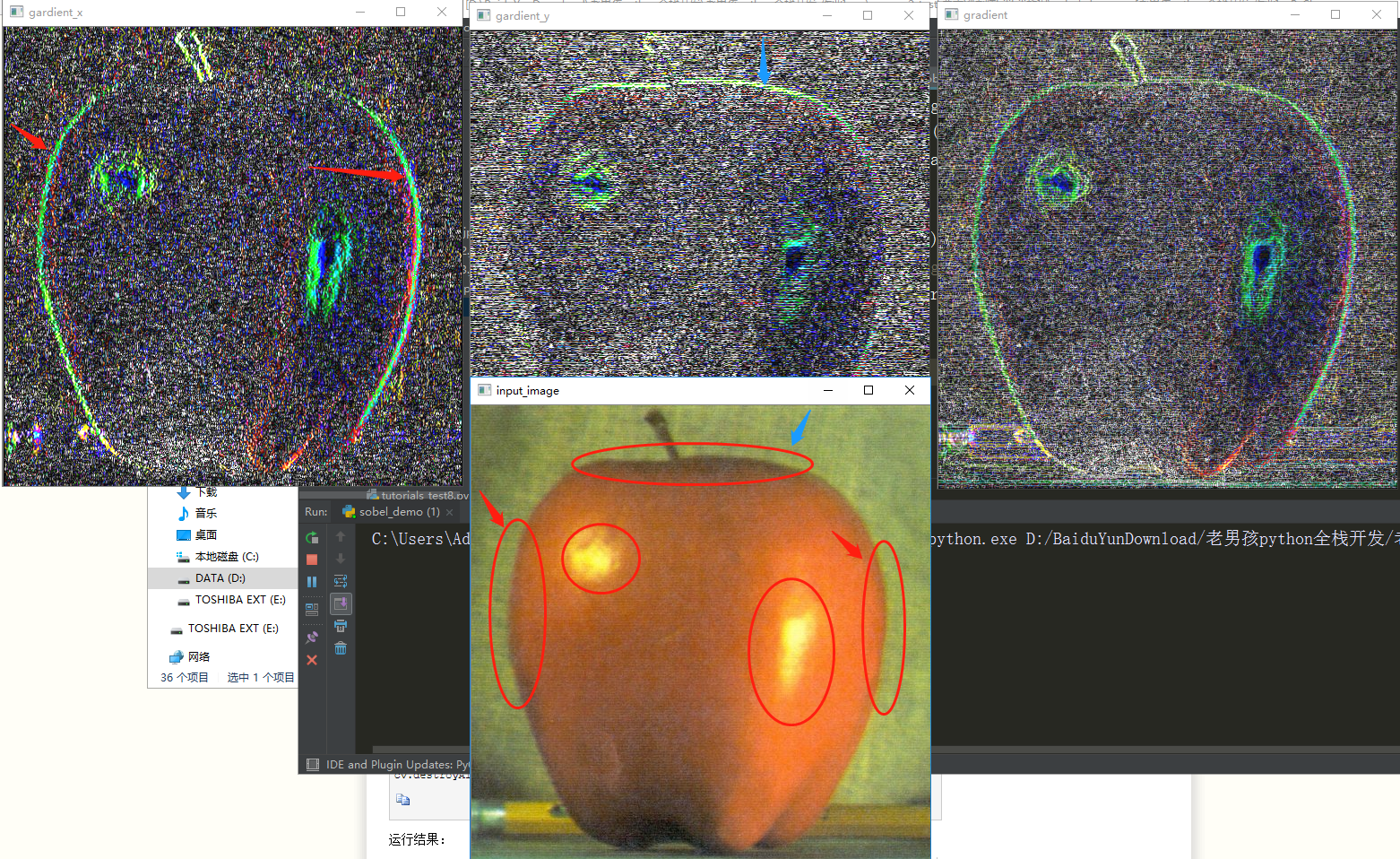
Sobel算子效果图:
Scharr算子是Sobel的升级增强
import cv2 as cv
import numpy as np #sobel算子
def soble_demo(image):
cv.imshow('input_image', src)
grad_x = cv.Sobel(image,cv.CV_32F,dx=1,dy=0) #对x求一阶导
grad_y = cv.Sobel(image,cv.CV_32F,dx=0,dy=1) #对y求一阶导
# grad_x = cv.Scharr(image, cv.CV_32F, dx=1, dy=0) # 对x求一阶导,Scharr算子是Sobel的升级增强
# grad_y = cv.Scharr(image,cv.CV_32F,dx=0,dy=1) #对y求一阶导,Scharr算子是Sobel的升级增强
gradx = cv.convertScaleAbs(grad_x)
grady = cv.convertScaleAbs(grad_y)
cv.imshow("gardient_x",gradx) #x方向上的梯度
cv.imshow("gardient_y",grady) #y方向上的梯度
gradxy = cv.addWeighted(gradx,0.5,grady,0.5,0) #添加xy方向上权重各为0.5,z方向权重为0,图片融合
cv.imshow('gradient',gradxy) src = cv.imread('lena.jpg')
# cv.namedWindow('input_image',cv.WINDOW_AUTOSIZE)
cv.imshow('input_image1', src) soble_demo(src)
laplace_demo(src) cv.waitKey(0)
cv.destroyAllWindows()
注意:
1.Sobel算子用来计算图像灰度函数的近似梯度。Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。
2.Sobel具有平滑和微分的功效。即:Sobel算子先将图像横向或纵向平滑,然后再纵向或横向差分,得到的结果是平滑后的差分结果。
OpenCV的Sobel函数原型为:Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。(必需)
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。(必需)
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dx参数表示x方向上的差分阶数,1或0 。(必需)
dy参数表示y 方向上的差分阶数,1或0 。(必需)
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示Sobel算子的大小,必须为1、3、5、7。
scale参数表示缩放导数的比例常数,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
参考:
https://blog.csdn.net/streamchuanxi/article/details/51542141
https://blog.csdn.net/sunny2038/article/details/9170013
Sobel算子原理:https://www.cnblogs.com/lancidie/archive/2011/07/17/2108885.html
注意:
Scharr算子也是计算x或y方向上的图像差分。OpenCV的Scharr函数原型为:Scharr(src, ddepth, dx, dy[, dst[, scale[, delta[, borderType]]]]) -> dst
参数和Sobel算子的几乎差不多,意思也一样,只是没有ksize大小。
2.OpenCV的convertScaleAbs函数使用线性变换转换输入数组元素成8位无符号整型。
函数原型:convertScaleAbs(src[, dst[, alpha[, beta]]]) -> dst
3.OpenCV的addWeighted函数是计算两个数组的加权和。
函数原型:addWeighted(src1, alpha, src2, beta, gamma[, dst[, dtype]]) -> dst
src1参数表示需要加权的第一个输入数组。
alpha参数表示第一个数组的权重。
src2参数表示第二个输入数组,它和第一个数组拥有相同的尺寸和通道数。
beta参数表示第二个数组的权重。
gamma参数表示一个加到权重总和上的标量值。
dst参数表示输出的数组,它和输入的两个数组拥有相同的尺寸和通道数。
dtype参数表示输出数组的可选深度。当两个输入数组具有相同的深度时,这个参数设置为-1(默认值),即等同于src1.depth()。
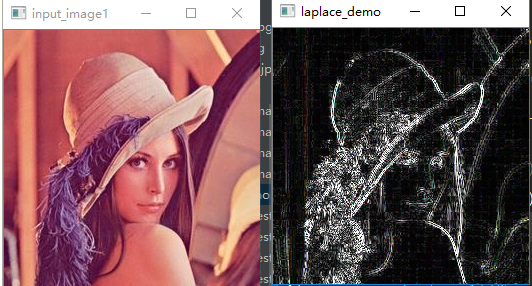
#laplace算子
def laplace_demo(image):
dst = cv.Laplacian(image,cv.CV_32F)
lpls = cv.convertScaleAbs(dst) #自定义 cv.Laplacian(),内核kernel
kernel1 = np.array([[0,1,0],[1,-4,1],[0,1,0]]) #kernel1 内核相当于cv.Laplacian(src, ddepth, dst=None, ksize=1)
kernel2 = np.array([[1,1,1],[1,-8,1],[1,1,1]]) #kernel2 内核相当于
dst = cv.filter2D(image,cv.CV_32F,kernel=kernel2)
lpls = cv.convertScaleAbs(dst) cv.imshow("laplace_demo",lpls)
运行结果:
注意:
1.拉普拉斯算子(Laplace Operator)是n维欧几里德空间中的一个二阶微分算子,定义为梯度(▽f)的散度(▽·f)。
2.OpenCV的Laplacian函数原型为:Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]]) -> dst
src参数表示输入需要处理的图像。(必需)
ddepth参数表示输出图像深度,针对不同的输入图像,输出目标图像有不同的深度。(必需)
具体组合如下:
src.depth() = CV_8U, 取ddepth =-1/CV_16S/CV_32F/CV_64F (一般源图像都为CV_8U,为了避免溢出,一般ddepth参数选择CV_32F)
src.depth() = CV_16U/CV_16S, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_32F, 取ddepth =-1/CV_32F/CV_64F
src.depth() = CV_64F, 取ddepth = -1/CV_64F
注:ddepth =-1时,代表输出图像与输入图像相同的深度。
dst参数表示输出与src相同大小和相同通道数的图像。
ksize参数表示用于计算二阶导数滤波器的孔径大小,大小必须是正数和奇数。
scale参数表示计算拉普拉斯算子值的比例因子,默认情况下没有伸缩系数。
delta参数表示一个可选的增量,将会加到最终的dst中,同样,默认情况下没有额外的值加到dst中。
borderType表示判断图像边界的模式。这个参数默认值为cv2.BORDER_DEFAULT。
补:
这里ksize参数默认值为1,此时Laplacian()函数采用以下3x3的孔径:
参考:
https://www.jianshu.com/p/c946cbdb6081
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_gradients/py_gradients.html#gradients
【python-opencv】18-图像梯度+图像边界的更多相关文章
- python opencv:摄像头捕获图像
- Python下opencv使用笔记(图像频域滤波与傅里叶变换)
Python下opencv使用笔记(图像频域滤波与傅里叶变换) 转载一只程序喵 最后发布于2018-04-06 19:07:26 阅读数 1654 收藏 展开 本文转载自 https://blog ...
- Python+OpenCV图像处理(十二)—— 图像梯度
简介:图像梯度可以把图像看成二维离散函数,图像梯度其实就是这个二维离散函数的求导. Sobel算子是普通一阶差分,是基于寻找梯度强度.拉普拉斯算子(二阶差分)是基于过零点检测.通过计算梯度,设置阀值, ...
- opencv python:图像梯度
一阶导数与Soble算子 二阶导数与拉普拉斯算子 图像边缘: Soble算子: 二阶导数: 拉普拉斯算子: import cv2 as cv import numpy as np # 图像梯度(由x, ...
- OpenCV学习笔记(10)——图像梯度
学习图像梯度,图像边界等 梯度简单来说就是求导. OpenCV提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel,Scharr和Lapacian.Sobel,Scharr其实就是求一阶或二阶导. ...
- OpenCV常用基本处理函数(6)图像梯度
形态学转换 腐蚀 img = cv2.imread() kernel = np.ones((,),np.uint8) erosion = cv2.erode(img,kernel,iterations ...
- OpenCV Python教程(1、图像的载入、显示和保存)
原文地址:http://blog.csdn.net/sunny2038/article/details/9057415 转载请详细注明原作者及出处,谢谢! 本文是OpenCV 2 Computer ...
- opencv学习笔记(六)---图像梯度
图像梯度的算法有很多方法:sabel算子,scharr算子,laplacian算子,sanny边缘检测(下个随笔)... 这些算子的原理可参考:https://blog.csdn.net/poem_q ...
- opencv:图像梯度
常见的图像梯度算子: 一阶导数算子: #include <opencv2/opencv.hpp> #include <iostream> using namespace cv; ...
随机推荐
- sharepoint权限操作(记录以备忘)
using Microsoft.SharePoint; using System; using System.Collections.Generic; using System.Linq; using ...
- oracle 排序字段自增长
<insert id="insertGoodsDescription" parameterClass="goodsDescription" > &l ...
- iptraf:一个实用的TCP/UDP网络监控工具
iptraf是一个基于ncurses的IP局域网监控器,用来生成包括TCP信息.UDP计数.ICMP和OSPF信息.以太网负载信息.节点状态信息.IP校验和错误等等统计数据. 它基于ncurses的用 ...
- LINUX安装中文输入法和那些大坑
明明有很多事要做,却偏偏不知道要做什么,这种感觉,很令人上火. 一.基础知识 在原生ubuntu14.04英文环境系统中只有IBus拼音,真的好难用.由于搜狗输入法确实比Linux系统下其它的中文输入 ...
- Hibernate系列之ID生成策略
一.概述 hibernate中使用两种方式实现主键生成策略,分别是XML生成id和注解方式(@GeneratedValue),下面逐一进行总结. 二.XML配置方法 这种方式是在XX.hbm.xml文 ...
- Eclipse配色方案插件
Eclipse配色方案插件 真漂亮! 最近发现了一个Eclipse配色方案插件,这回给Eclipse配色太方便了. 插件主页:http://eclipsecolorthemes.org/ 插件提供了上 ...
- EPON ONU软件升级的若干优化方案
1 说明 目前EPON ONU软件升级主要有IP方式(如SNMP/TR069)和TFTP+OAM两种.前者需占用大量IP地址,且配置ONU的IP地址需要手工操作,给业务开通和系统维护带来较大不便:后者 ...
- 用图形数据库Neo4j 设计权限模块
已经 SpringSecurity 在几个项目中 实现权限模块,对于数据库,也是思考了不少,从Mysql 到 mongodb 都不是特别满意, 在Mysql中,如果权限相对简单,那么还能接受,如果稍微 ...
- 【SpringCloud微服务实战学习系列】配置详解
前言 Spring Boot针对常用的开发场景提供了一系列自动化配置来减少原本复杂而又几乎很少改动的模板化配置内容. 一.配置文件 Spring Boot的默认配置文件位置为src/main.reso ...
- Android 验证APK是否已经签名或是否是Debug签名
https://source.android.google.cn/ http://www.android-doc.com/tools/publishing/app-signing.html Signi ...