激光相机数据融合(5)--Gazebo仿真数据融合
这一节将用ROS+Gazebo 环境获取激光获取点云,并用PCL和OPENCV处理,源代码在:https://github.com/ZouCheng321/5_laser_camera_sim
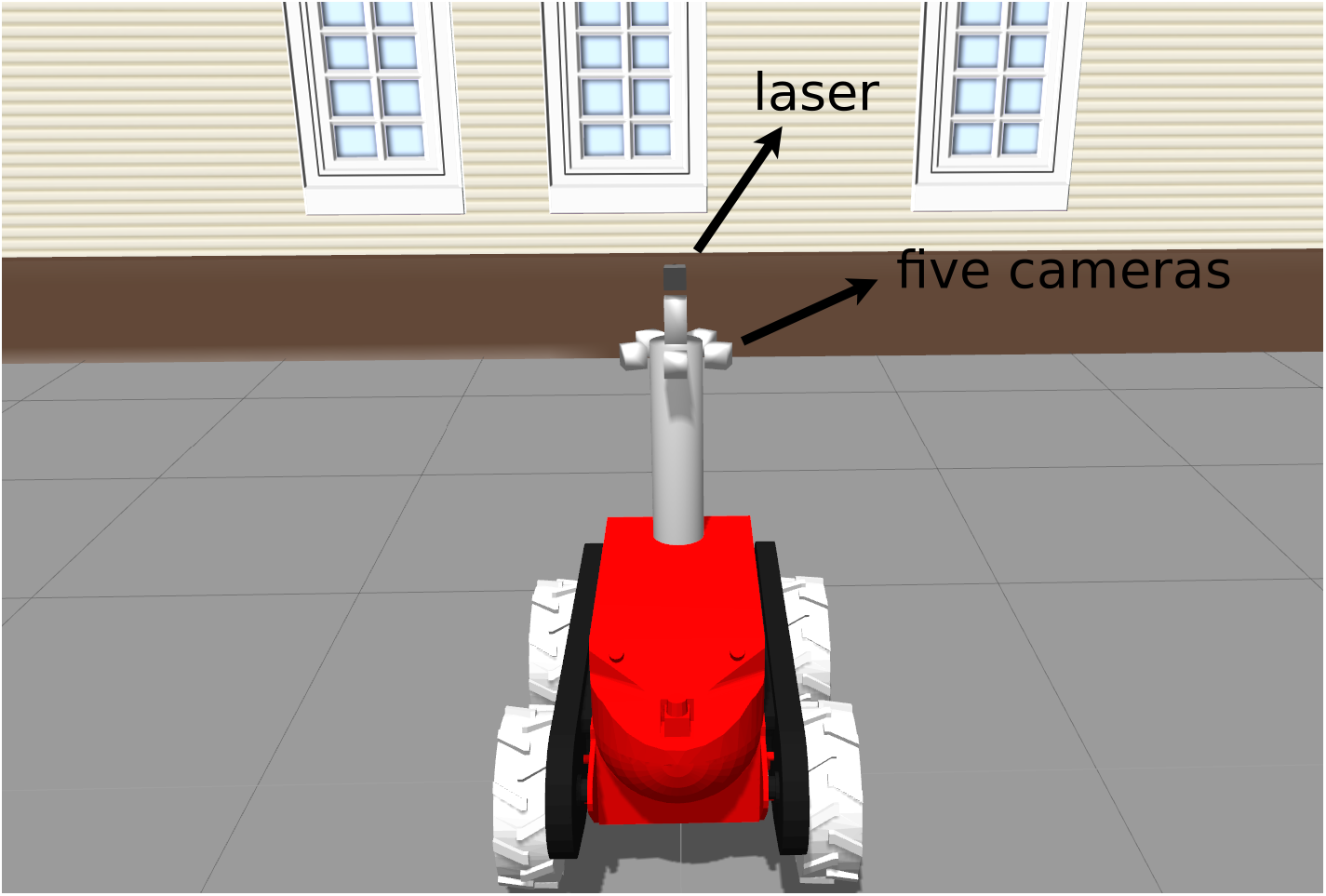
由于激光的视角远大于相机,所以我们使用了5个相机来获取图像,这类似于Ladybug相机:
相机获取的五张图像:

接下来我们用来构建彩色点云:
相机与激光的位置变换,由于是正五边形分别,这很容易求得:
Eigen::Matrix4f rt0,rt1,rt2,rt3,rt4;
rt0<< ,,-,, ,,,, ,,,, ,,,;
rt1<< ,,-,, -0.95105651629,0.30901699437,,, 0.30901699437,0.95105651629,,, ,,,;
rt2 << ,,-,, -0.58778525229,-0.80901699437,,, -0.80901699437,0.58778525229,,, ,,,;
rt3 << ,,-,, 0.58778525229,-0.80901699437,,, -0.80901699437,-0.58778525229,,, ,,,;
rt4 << ,,-,, 0.95105651629,0.30901699437,,, 0.30901699437,-0.95105651629,,, ,,,;
Eigen::Matrix4f inv0,inv1,inv2,inv3,inv4;
inv0=rt0.inverse();
inv1=rt1.inverse();
inv2=rt2.inverse();
inv3=rt3.inverse();
inv4=rt4.inverse(); RT.push_back(rt0);
RT.push_back(rt1);
RT.push_back(rt2);
RT.push_back(rt3);
RT.push_back(rt4); INV.push_back(inv0);
INV.push_back(inv1);
INV.push_back(inv2);
INV.push_back(inv3);
INV.push_back(inv4);
相机的内参,已经在仿真软件中设定:
std::vector<cv::Point2d> imagePoints;
cv::Mat intrisicMat(, , cv::DataType<double>::type); // Intrisic matrix
intrisicMat.at<double>(, ) = 476.715669286;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = 476.715669286;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
intrisicMat.at<double>(, ) = ;
cv::Mat rVec(, , cv::DataType<double>::type); // Rotation vector
rVec.at<double>() = ;
rVec.at<double>() = ;
rVec.at<double>() = ;
cv::Mat tVec(, , cv::DataType<double>::type); // Translation vector
tVec.at<double>() = 0.4;
tVec.at<double>() = ;
tVec.at<double>() = -0.1;
cv::Mat distCoeffs(, , cv::DataType<double>::type); // Distortion vector
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
distCoeffs.at<double>() = ;
去除相机后方的点云:
std::vector<cv::Point3d> Generate3DPoints(pcl::PointCloud<pcl::PointXYZ>::Ptr cloud,int num)
{
std::vector<cv::Point3d> points;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_f (new pcl::PointCloud<pcl::PointXYZ>); Eigen::Matrix4f TR;
TR << ,,-,, ,,,, ,,,, ,,,;
pcl::transformPointCloud (*cloud, *cloud_f, RT[num]); pcl::PassThrough<pcl::PointXYZ> pass;
pass.setInputCloud (cloud_f);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0.0, );
//pass.setFilterLimitsNegative (true);
pass.filter (*cloud);
cout<<"size:"<<cloud->size()<<endl; for(int i=;i<=cloud->points.size();i++)
{
points.push_back(cv::Point3d(cloud->points[i].x, cloud->points[i].y, cloud->points[i].z));
} return points;
}
将前方的点云投影到相机平面,这里直接用opencv自带的projectPoints函数:
cv::projectPoints(objectPoints, rVec, tVec, intrisicMat, distCoeffs, imagePoints);
保留图像内的点云:
for(int i=;i<imagePoints.size();i++)
{
if(imagePoints[i].x>=&&imagePoints[i].x<&&imagePoints[i].y>=&&imagePoints[i].y<)
{ pcl::PointXYZRGB point;
point.x = cloud->points[i].x;
point.y = cloud->points[i].y;
point.z = cloud->points[i].z;
point.r = _I(round(imagePoints[i].x),round(imagePoints[i].y))[];
point.g = _I(round(imagePoints[i].x),round(imagePoints[i].y))[];
point.b = _I(round(imagePoints[i].x),round(imagePoints[i].y))[]; colored_cloud->points.push_back (point);
}
}
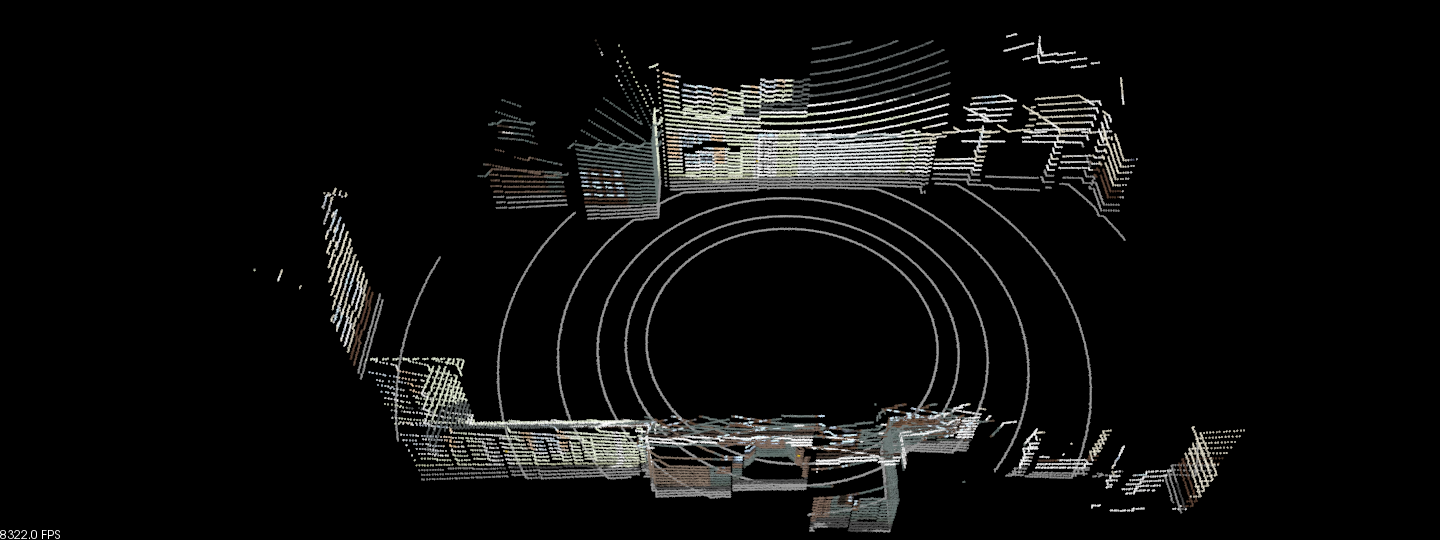
最后显示所有点云:
pcl::visualization::PCLVisualizer viewer("Cloud viewer");
viewer.addPointCloud(colored_cloud_sum, "sample cloud");
viewer.setBackgroundColor(,,);
while(!viewer.wasStopped())
//while (!viewer->wasStopped ())
viewer.spinOnce();
要构建这个项目:
cd 5_laser_camera_sim
mkdir build
cd build
cmake ..
make
./color
将看到如下显示:
激光相机数据融合(5)--Gazebo仿真数据融合的更多相关文章
- 七牛云 融合CDN测试域名 -> 融合CDN加速域名
七牛云 融合CDN测试域名 -> 融合CDN加速域名 本篇主要讲解 如何将七牛云融合CDN测试域名 切换到自定义的加速域名上去,为什么会写这篇是因为我收到了一封 [七牛云]测试域名回收通知的邮件 ...
- 激光相机数据融合(4)--KITTI数据集中matlab接口说明及扩展
KITTI数据集接口已经提供了matlab接口,本篇将说明详细说明其应用并与PCL进行对接.PCL为C++点云处理语言库,详情可见:http://pointclouds.org/ 程序可以从官网下载, ...
- 激光相机数据融合(3)--KITTI数据集
KITTI数据集提供了双目图像,激光数据,和imu/gps位置信息,其中还包括了大量的算法.下载地址为:http://www.cvlibs.net/datasets/kitti/raw_data.ph ...
- 数据融合(data fusion)原理与方法
数据融合(data fusion)原理与方法 数据融合(data fusion)最早被应用于军事领域. 现在数据融合的主要应用领域有:多源影像复合.机器人和智能仪器系统.战场和无人驾驶飞机.图 ...
- IDM主机上安装融合应用程序配置框架
IDM主机上安装融合应用程序配置框架 安装Oracle融合应用程序>设置>身份和访问管理节点安装融合应用程序配置框架 由于我们使用Oracle VirtualBox虚拟机这一次,我们在 ...
- DirectX基础学习系列5 融合技术
7.1融合方程 1概念 融合技术将当前光栅化像素的颜色与以前已光栅化并处于同一个位置的像素颜色进行合成,即将当前要进行光栅化的三角形单元与已写入后台的像素进行融合 2需要遵循的原则: (1)先绘制不需 ...
- Gluon炼丹(Kaggle 120种狗分类,迁移学习加双模型融合)
这是在kaggle上的一个练习比赛,使用的是ImageNet数据集的子集. 注意,mxnet版本要高于0.12.1b2017112. 下载数据集. train.zip test.zip labels ...
- SSE图像算法优化系列二十九:基础的拉普拉斯金字塔融合用于改善图像增强中易出现的过增强问题(一)
拉普拉斯金字塔融合是多图融合相关算法里最简单和最容易实现的一种,我们在看网络上大部分的文章都是在拿那个苹果和橙子融合在一起,变成一个果橙的效果作为例子说明.在这方面确实融合的比较好.但是本文我们主要讲 ...
- GDAL多光谱与全色图像融合简单使用
目录 简述 C++代码 效果对比 GDAL融合效果和原始多光谱波段对比 GDAL融合效果和原始全色波段对比 ARCGIS融合效果与原始全色和多光谱对比 GDAL融合效果与ArcGIS融合效果对比 简述 ...
随机推荐
- java连接sqlserver2008r2 心得
现在是该轻松一笑的时候了,困扰已久的问题有了解释了. 之前的各种连不上,说到底还是权限问题,sqlserver2008r2的权限分得太细了. 两个实例间数据库互相都看不到,更不用谈访问了. 端口号也是 ...
- CSS之 border 属性
特性 border-width 不支持百分比 border-color 默认颜色是 color border-color 透明值的作用:可利用增加可点击区域,利用内阴影做边框 border 应用 ...
- 干货|人人都是翻译项目的Master
在平时的工作中,我们都会经常查阅一些英文文档来解决平时遇到的问题和拓宽视野.看到好的文章或者书籍有没有想要和小伙伴分享的冲动,那么我们一起来翻译吧- 翻译主张 "信 达 雅" .& ...
- win10 UWP 单元测试
我们在写代码的时候不能保证我们写出来的代码是正确的,所以我们经常要单元测试. 单元测试和重构都是在做完一个小小函数一般就要进行一次,越早做就越好,可以比较早发现问题,这时我们还记得我们写的内容,不过比 ...
- 关于限制DHCP服务器广播的另类方法
0. 引言 如图,家里有两台计算机,分别处于不同房间.其中一台PC1能够与光猫直连:另外一台PC2较远,考虑到光猫有WLAN功能,便使用了一个路由器无线桥接到光猫,然后有线连接到PC2(均与光猫处于同 ...
- ssh -T git@github.com出现Permission denied (publickey)
参考自:http://blog.csdn.net/sunnypotter/article/details/18948053 参考自:http://stackoverflow.com/questions ...
- 【NOIP2016提高组】 Day1 T3 换教室
题目链接:https://www.luogu.org/problemnew/show/P1850 此题正解为dp. 我们先用floyd处理出任意两个教室之间的距离,用dis[i][j]表示. 用f[i ...
- 基于HTML5的WebGL实现的2D3D迷宫小游戏
为了实现一个基于HTML5的场景小游戏,我采用了HT for Web来实现,短短200行代码,我就能实现用"第一人称"来操作前进后退上下左右,并且实现了碰撞检测. 先来看下实现的效 ...
- Vue2.0 v-for 中 :key 到底有什么用?
其实不只是vue,react中在执行列表渲染时也会要求给每个组件添加上key这个属性. 要解释key的作用,不得不先介绍一下虚拟DOM的Diff算法了. 我们知道,vue和react都实现了一套虚拟D ...
- 符合语言习惯的Python优雅编程技巧
Python最大的优点之一就是语法简洁,好的代码就像伪代码一样,干净.整洁.一目了然.要写出 Pythonic(优雅的.地道的.整洁的)代码,需要多看多学大牛们写的代码,github 上有很多非常优秀 ...