[TPYBoard - Micropython之会python就能做硬件 8] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi
一、实验器材
1、TPYboard V102板 一块
2、电机驱动模块L298N 一个
3、电机 两块
4、小车底盘
5、超声波模块
6、5110屏 一块
二、超声波模块
1、什么是超声波模块
超声波传感器是利用超声波的特性研制而成的传感器, 它是通过传送一个超声波(远高于人的听觉范围)和提供一个对应于爆裂回声返回到传感器所需时间的输出脉冲来工作的。超声波传感器在非接触性测量方面的应用非常广泛,如检测液体水位(特别是具有腐蚀性的液体,如硫酸、硝酸液体),汽车倒车防撞系统,金属/非金属探伤等,都可以用到超声波距离传感器。
2、超声波模块测距的原理
(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
三、实验一:超声波模块测距,用5110来显示
1、连线方法
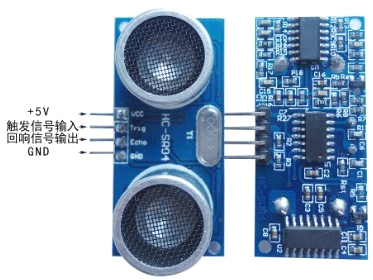
(1)超声波模块连接方法
VCC 供 5V电源, GND 为地线,TRIG 触发控制信号输入,接板子的X2,ECHO 回响信号输出,接板子的X1,四个接口端。
(2)5110连线及使用方法
具体见:http://www.cnblogs.com/xiaowuyi/p/6347336.html
2、原代码
导入font.py文件和upcd8544.py文件,编写main.py
main.py的代码如下:
import pyb
from pyb import Pin
from pyb import Timer
import upcd8544
from machine import SPI,Pin Trig = Pin('X2',Pin.OUT_PP)
Echo = Pin('X1',Pin.IN)
num=0
flag=0
run=1
def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) while True: if(run==1):
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('Y10')
CE = pyb.Pin('Y11')
DC = pyb.Pin('Y9')
LIGHT = pyb.Pin('Y12')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT)
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance:')
print(distance,'cm')
lcd_5110.lcd_write_string('Distance',0,0)
lcd_5110.lcd_write_string(str(distance),0,1)
lcd_5110.lcd_write_string('cm',50,1)
flag=0
run=0
3、效果
(1)靠近障碍物

(2)远离障碍物

四、实验二:避障小车
1、什么是电机驱动模块
电机驱动模块主要是可以控制电机的运行:调速、运行、停止、步进、匀速等操作
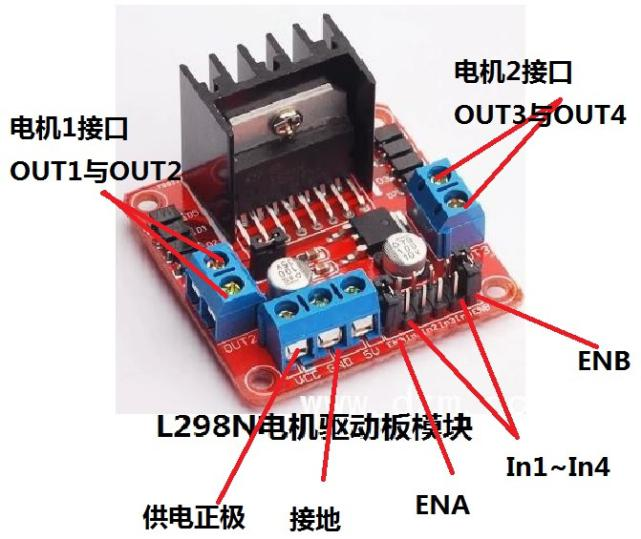
2、L298N的连接及使用方法
L298N模块是2路的H桥驱动,所以可以同时驱动两个电机,接法如图所示使能ENA ENB之后,可以分别从IN1 IN2输入PWM信号驱动电机1的转速和方向,可以分别从IN3 IN4输入PWM信号驱动电机2的转速和方向。我们将电机1接口的OUT1与OUT2与小车的一个电机的正负极连接起来,将电机2接口的OUT3与OUT2与小车的另一个电机的正负极连接起来。然后将两边的接线端子,即供电正极(中间的接线端子为接地)连接TPYboard的VIN,中间的接线端子即接地,连接TPYBoard的GND,In1-In4连接TPYBoard的Y1,Y2,Y3,Y4,通过Y1,Y2与Y3,Y4的高低电平,来控制电机的转动,从而让小车前进,后退,向左,向右。
3、利用底盘+V102+超声波+L298N当小车往前开时,遇到障碍会自己拐弯,躲避
(1)原代码 main,py文件
# main.py -- put your code here!
import pyb
from pyb import Pin
from pyb import Timer def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
def left():
x1.high()
x2.low()
y1.high()
y2.low()
def go():
x1.high()
x2.low()
y1.low()
y2.high() def back():
x1.low()
x2.high()
y1.high()
y2.low()
def right():
x1.low()
x2.high()
y1.low()
y2.high()
def stop():
x1.low()
x2.low()
y1.low()
y2.low() Trig = Pin('X9',Pin.OUT_PP)
Echo = Pin('X10',Pin.IN)
num=0
flag=0
run=1 start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) x1 = Pin('X1', Pin.OUT_PP)
x2 = Pin('X2', Pin.OUT_PP)
y1 = Pin('Y1', Pin.OUT_PP)
y2 = Pin('Y2', Pin.OUT_PP) while True:
if(run==1):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance')
print(distance,'cm')
if distance>=20:
go()
if distance<=20:
stop()
back()
flag=0
run=0
(2)实现效果
以上视频如果浏览不了,请访问http://admin.turnipsmart.com/IMG_3362.mp4
[TPYBoard - Micropython之会python就能做硬件 8] 学习使用蓝牙模块及舵机的更多相关文章
- [TPYBoard-Micropython之会python就能做硬件 7] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard - Micropython之会python就能做硬件 8] 学习使用超声波模块制作避障小车
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2.电机驱动模块L2 ...
- [TPYBoard - Micropython之会python就能做硬件 6] 学习使用OLED显示屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYBoard板子一块 2.数据线一条 ...
- [TPYBoard - Micropython之会python就能做硬件 1] 运行第一个脚本——点亮LED
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 一.TPYBoard V102开发板 TPYBoard V102 ...
- [TPYBoard - Micropython之会python就能做硬件 开篇]会python就能做硬件!
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 在写这套教程之前,首先感觉山东萝卜电子科技有限公司(turnip ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
- [TPYBoard-Micropython之会python就能做硬件 4] 学习使用电位器和1602显示屏
一.实验器材 1.TPYboard V102板 一块 2.电位器 一个 3.1602 屏 一块 4.杜邦线:若干 二.电位器的使用 电位器 (英文:Potentiometer)是可变电阻器的一种 ...
- [TPYBoard-Micropython之会python就能做硬件 5] 学习使用重力传感器及PWM
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard-Micropython之会python就能做硬件 2] 利用micropython控制NOKIA 5110屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.TPYboard V102板 一块 2.DS3231 ...
随机推荐
- B+树的插入、删除(附源代码)
B+ Tree Index B+树的插入 B+树的删除 完整测试代码 Basic B+树和B树类似(有关B树:http://www.cnblogs.com/YuNanlong/p/6354029.ht ...
- 应用程序初次运行数据库配置小程序(Java版)
应用程序初始化数据库配置小程序 之前写过一个Java版的信息管理系统,但部署系统的时候还需要手动的去配置数据库和导入一些初始化的数据才能让系统运行起来,所以我在想是不是可以写一个小程序在系统初次运行的 ...
- 《JAVASCRIPT高级程序设计》节点层次和DOM操作技术
DOM可以将任何HTML和XML文档描绘成一个由多层次节点构成的结构.节点分为几种不同的类型,每种类型分别表示文档中不同的信息,每种类型都继承与Node接口,因此都共同享有一些属性和方法,同时,也拥有 ...
- Program terminated with signal SIGKILL,Killed
车载后视镜机器,Liinux + qtUI形式,前后双路,前一天晚上开机用gdb run DvrUI,第二天早上回来一看,机器绿屏卡死了,录像预览停止刷新了,sd录像也停止了.点击无任何反应. 看gd ...
- c#.net的网站出现“正在中止线程””异常的原因和解决方法
出现“正在中止线程”异常通常都是由于以下三种原因导致引起,给出解决方案如下: 解决方案: 1.针对Response.End,调用 HttpContext.Current.ApplicationInst ...
- datagridview数据绑定操作数据库实现增删改查
DataSet数据集,数据缓存在客户端内存中,支持断开式连接.DataGridView控件绑定DataSet时,它自动的改变的DS的行的状态,而且在做增删改查的时候,可以借助SqlCommandBui ...
- 判断数据是否服从某一分布(二)——简单易用fitdistrplus包
一.对数据的分布进行初步判断 1.1 原理 对于不同的分布,有特定的偏度(skewness)和峰度(kurtosis),正态分布.均匀分布.逻辑斯谛分布.指数分布的偏度和峰度都是特定的值,在偏 ...
- ZooKeeper配额
ZooKeeper可以在znode上设置配额限制.如果超出了配置限制,ZooKeeper将会在log日志中打印WARN日志.如果超出配额限制,并不会停止行为操作. ZooKeeper的配额是存储在/z ...
- 在javascript中关于变量与函数的提升
在javascript中关于变量与函数的提升 一.简介 在javascript中声明变量与函数的执行步骤: 1.先预解析变量或函数声明代码,会把用var声明的变量或者函数声明的代码块进行提升操作 2. ...
- 利用hexo+github+nodejs搭建自我博客的一天
放一张比较喜欢的背景图镇楼,伪文艺一波.因为刚刚抱着四个快递从公司大门走到宿舍,快递都比我高,坐电梯的时候电梯里面的灯一闪一闪,电梯还摇晃,上演了一波鬼吹灯,惊魂未定... 说正题:我喜欢的博客应该是 ...