[TPYBoard - Micropython之会python就能做硬件 8] 学习使用超声波模块制作避障小车
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi
一、实验器材
1、TPYboard V102板 一块
2、电机驱动模块L298N 一个
3、电机 两块
4、小车底盘
5、超声波模块
6、5110屏 一块
二、超声波模块
1、什么是超声波模块
超声波传感器是利用超声波的特性研制而成的传感器, 它是通过传送一个超声波(远高于人的听觉范围)和提供一个对应于爆裂回声返回到传感器所需时间的输出脉冲来工作的。超声波传感器在非接触性测量方面的应用非常广泛,如检测液体水位(特别是具有腐蚀性的液体,如硫酸、硝酸液体),汽车倒车防撞系统,金属/非金属探伤等,都可以用到超声波距离传感器。
2、超声波模块测距的原理
(1)采用IO口TRIG触发测距,给最少10us的高电平信呈。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回。
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2。
三、实验一:超声波模块测距,用5110来显示
1、连线方法
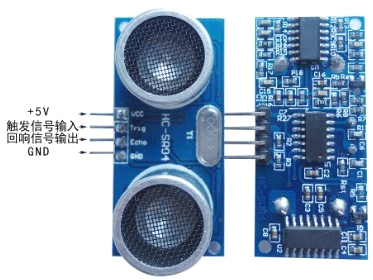
(1)超声波模块连接方法
VCC 供 5V电源, GND 为地线,TRIG 触发控制信号输入,接板子的X2,ECHO 回响信号输出,接板子的X1,四个接口端。
(2)5110连线及使用方法
具体见:http://www.cnblogs.com/xiaowuyi/p/6347336.html
2、原代码
导入font.py文件和upcd8544.py文件,编写main.py
main.py的代码如下:
import pyb
from pyb import Pin
from pyb import Timer
import upcd8544
from machine import SPI,Pin Trig = Pin('X2',Pin.OUT_PP)
Echo = Pin('X1',Pin.IN)
num=0
flag=0
run=1
def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) while True: if(run==1):
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('Y10')
CE = pyb.Pin('Y11')
DC = pyb.Pin('Y9')
LIGHT = pyb.Pin('Y12')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT)
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance:')
print(distance,'cm')
lcd_5110.lcd_write_string('Distance',0,0)
lcd_5110.lcd_write_string(str(distance),0,1)
lcd_5110.lcd_write_string('cm',50,1)
flag=0
run=0
3、效果
(1)靠近障碍物

(2)远离障碍物

四、实验二:避障小车
1、什么是电机驱动模块
电机驱动模块主要是可以控制电机的运行:调速、运行、停止、步进、匀速等操作
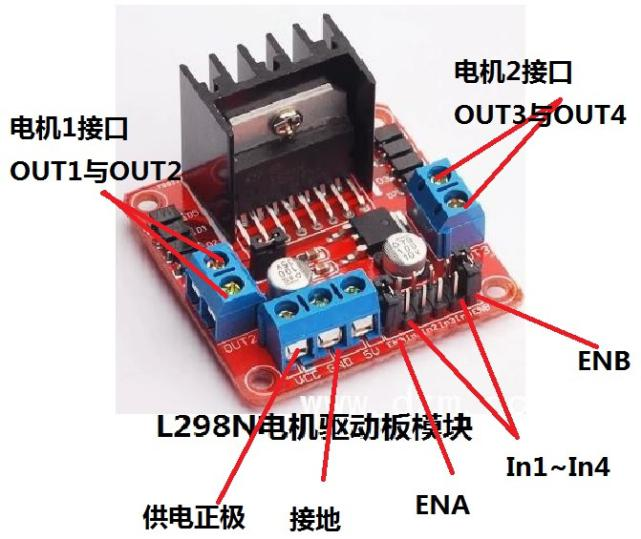
2、L298N的连接及使用方法
L298N模块是2路的H桥驱动,所以可以同时驱动两个电机,接法如图所示使能ENA ENB之后,可以分别从IN1 IN2输入PWM信号驱动电机1的转速和方向,可以分别从IN3 IN4输入PWM信号驱动电机2的转速和方向。我们将电机1接口的OUT1与OUT2与小车的一个电机的正负极连接起来,将电机2接口的OUT3与OUT2与小车的另一个电机的正负极连接起来。然后将两边的接线端子,即供电正极(中间的接线端子为接地)连接TPYboard的VIN,中间的接线端子即接地,连接TPYBoard的GND,In1-In4连接TPYBoard的Y1,Y2,Y3,Y4,通过Y1,Y2与Y3,Y4的高低电平,来控制电机的转动,从而让小车前进,后退,向左,向右。
3、利用底盘+V102+超声波+L298N当小车往前开时,遇到障碍会自己拐弯,躲避
(1)原代码 main,py文件
# main.py -- put your code here!
import pyb
from pyb import Pin
from pyb import Timer def start(t):
global flag
global num
if(flag==0):
num=0
else:
num=num+1
def stop(t):
global run
if(run==0):
run=1
def left():
x1.high()
x2.low()
y1.high()
y2.low()
def go():
x1.high()
x2.low()
y1.low()
y2.high() def back():
x1.low()
x2.high()
y1.high()
y2.low()
def right():
x1.low()
x2.high()
y1.low()
y2.high()
def stop():
x1.low()
x2.low()
y1.low()
y2.low() Trig = Pin('X9',Pin.OUT_PP)
Echo = Pin('X10',Pin.IN)
num=0
flag=0
run=1 start1=Timer(1,freq=10000,callback=start)
stop1=Timer(4,freq=2,callback=stop) x1 = Pin('X1', Pin.OUT_PP)
x2 = Pin('X2', Pin.OUT_PP)
y1 = Pin('Y1', Pin.OUT_PP)
y2 = Pin('Y2', Pin.OUT_PP) while True:
if(run==1):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
while(Echo.value()==0):
Trig.value(1)
pyb.udelay(100)
Trig.value(0)
flag=0
if(Echo.value()==1):
flag=1
while(Echo.value()==1):
flag=1
if(num!=0):
#print('num:',num)
distance=num/10000*34299/2
print('Distance')
print(distance,'cm')
if distance>=20:
go()
if distance<=20:
stop()
back()
flag=0
run=0
(2)实现效果
以上视频如果浏览不了,请访问http://admin.turnipsmart.com/IMG_3362.mp4
[TPYBoard - Micropython之会python就能做硬件 8] 学习使用超声波模块制作避障小车的更多相关文章
- [TPYBoard - Micropython之会python就能做硬件 8] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2.电机驱动模块L2 ...
- [TPYBoard - Micropython之会python就能做硬件 6] 学习使用OLED显示屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYBoard板子一块 2.数据线一条 ...
- [TPYBoard - Micropython之会python就能做硬件 1] 运行第一个脚本——点亮LED
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 一.TPYBoard V102开发板 TPYBoard V102 ...
- [TPYBoard - Micropython之会python就能做硬件 开篇]会python就能做硬件!
转载请注明:@小五义http://www.cnblogs.com/xiaowuyiQQ群:64770604 会python就能做硬件! 在写这套教程之前,首先感觉山东萝卜电子科技有限公司(turnip ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
- [TPYBoard-Micropython之会python就能做硬件 7] 学习使用蓝牙模块及舵机
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard-Micropython之会python就能做硬件 4] 学习使用电位器和1602显示屏
一.实验器材 1.TPYboard V102板 一块 2.电位器 一个 3.1602 屏 一块 4.杜邦线:若干 二.电位器的使用 电位器 (英文:Potentiometer)是可变电阻器的一种 ...
- [TPYBoard-Micropython之会python就能做硬件 5] 学习使用重力传感器及PWM
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.实验器材 1.TPYboard V102板 一块 2 ...
- [TPYBoard-Micropython之会python就能做硬件 2] 利用micropython控制NOKIA 5110屏
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.TPYboard V102板 一块 2.DS3231 ...
随机推荐
- 洛谷P1516 青蛙的约会
题目描述 两只青蛙在网上相识了,它们聊得很开心,于是觉得很有必要见一面.它们很高兴地发现它们住在同一条纬度线上,于是它们约定各自朝西跳,直到碰面为止.可是它们出发之前忘记了一件很重要的事情,既没有问清 ...
- css小知识
7. span { display:inline-block; width:70px; /* 超出长度以...显示 */ text-overflow: ellipsis; white-space: n ...
- XRecyclerView上拉刷新下拉加载
效果图: 首先要添加依赖: //xrecyclerviewimplementation 'com.jcodecraeer:xrecyclerview:1.3.2'//Gsonimplementatio ...
- (网页)websocket例子
转载自博客园张果package action; import javax.websocket.CloseReason; import javax.websocket.OnClose; import j ...
- 这几天上海移动网络可以直接打开 Google Play 了
这几天上海移动网络可以直接打开 Google Play (谷歌应用商店)了. 速度还不错.基本无延迟. 想当初,为了防止国内应用市场里的木马或恶意软件,想从 Google Play 应用市场下载,折腾 ...
- vi中的全局替换
一.基本语法 替换命令语法: :[addr]s/源字符串/目标字符串/[option] 全局替换: :%s/源字符串/目标字符串/g 参数说明: [addr]--表示检索范围,省略时表示当前行. &q ...
- spring4笔记----web.xml中2.4以上版本Listener的配置
基本上没用过Servlet2.4以下版本,所以2.4版本以下不必学了 <?xml version="1.0" encoding="UTF-8"?> ...
- 自动化测试基础篇--Selenium等待时间
摘自https://www.cnblogs.com/sanzangTst/p/8376221.html 当你觉得你的定位没有问题,但是却直接报了元素不可见,那你就可以考虑是不是因为程序运行太快或者页面 ...
- NUMA导致的Oracle性能问题
背景简介: Oracle版本:11.2.0.4 OS 版本:OEL5.8 在一次Oracle的Dataguard正常switchover过程中,遇到了一个极其诡异的问题,一条主业务的SQL语句在新主库 ...
- Echars鼠标点击事件多次触发
gChart.on('click', function (params) { if (params.componentSubType == "bar" && par ...