Python从0到1丨详解图像锐化的Sobel、Laplacian算子
本文分享自华为云社区《[Python从零到壹] 五十八.图像增强及运算篇之图像锐化Sobel、Laplacian算子实现边缘检测》,作者: eastmount 。
一.Sobel算子
Sobel算子是一种用于边缘检测的离散微分算子,它结合了高斯平滑和微分求导。该算子用于计算图像明暗程度近似值,根据图像边缘旁边明暗程度把该区域内超过某个数的特定点记为边缘。Sobel算子在Prewitt算子的基础上增加了权重的概念,认为相邻点的距离远近对当前像素点的影响是不同的,距离越近的像素点对应当前像素的影响越大,从而实现图像锐化并突出边缘轮廓[1-4]。
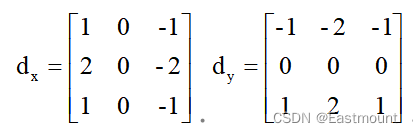
Sobel算子的边缘定位更准确,常用于噪声较多、灰度渐变的图像。其算法模板如公式(1)所示,其中dx表示水平方向,dy表示垂直方向[3]。
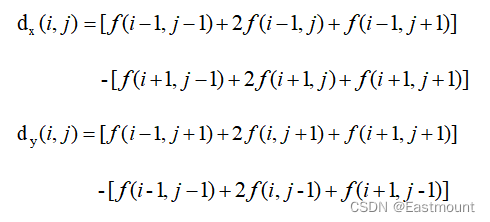
其像素计算公式如下:
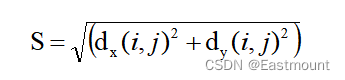
Sobel算子像素的最终计算公式如下:
Sobel算子根据像素点上下、左右邻点灰度加权差,在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息。因为Sobel算子结合了高斯平滑和微分求导(分化),因此结果会具有更多的抗噪性,当对精度要求不是很高时,Sobel算子是一种较为常用的边缘检测方法。
Python和OpenCV将Sobel算子封装在Sobel()函数中,其函数原型如下所示:
- dst = Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src表示输入图像
– dst表示输出的边缘图,其大小和通道数与输入图像相同
– ddepth表示目标图像所需的深度,针对不同的输入图像,输出目标图像有不同的深度
– dx表示x方向上的差分阶数,取值1或 0
– dy表示y方向上的差分阶数,取值1或0
– ksize表示Sobel算子的大小,其值必须是正数和奇数
– scale表示缩放导数的比例常数,默认情况下没有伸缩系数
– delta表示将结果存入目标图像之前,添加到结果中的可选增量值
– borderType表示边框模式,更多详细信息查阅BorderTypes
注意,在进行Sobel算子处理之后,还需要调用convertScaleAbs()函数计算绝对值,并将图像转换为8位图进行显示。其算法原型如下:
- dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src表示原数组
– dst表示输出数组,深度为8位
– alpha表示比例因子
– beta表示原数组元素按比例缩放后添加的值
Sobel算子的实现代码如下所示。
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('luo.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Sobel算子
x = cv2.Sobel(grayImage, cv2.CV_16S, 1, 0) #对x求一阶导
y = cv2.Sobel(grayImage, cv2.CV_16S, 0, 1) #对y求一阶导
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图形
titles = ['原始图像', 'Sobel算子']
images = [lenna_img, Sobel]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其运行结果如图1所示:

二.Laplacian算子
拉普拉斯(Laplacian)算子是n维欧几里德空间中的一个二阶微分算子,常用于图像增强领域和边缘提取。它通过灰度差分计算邻域内的像素,基本流程是:
- 判断图像中心像素灰度值与它周围其他像素的灰度值;
- 如果中心像素的灰度更高,则提升中心像素的灰度;
- 反之降低中心像素的灰度,从而实现图像锐化操作。
在算法实现过程中,Laplacian算子通过对邻域中心像素的四方向或八方向求梯度,再将梯度相加起来判断中心像素灰度与邻域内其他像素灰度的关系,最后通过梯度运算的结果对像素灰度进行调整[2]。
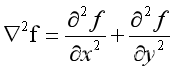
一个连续的二元函数f(x,y),其拉普拉斯运算定义为:
Laplacian算子分为四邻域和八邻域,四邻域是对邻域中心像素的四方向求梯度,八邻域是对八方向求梯度。其中,四邻域模板如公式(5)所示:
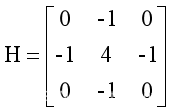
其像素的计算公式可以简化为:

通过模板可以发现,当邻域内像素灰度相同时,模板的卷积运算结果为0;当中心像素灰度高于邻域内其他像素的平均灰度时,模板的卷积运算结果为正数;当中心像素的灰度低于邻域内其他像素的平均灰度时,模板的卷积为负数。对卷积运算的结果用适当的衰弱因子处理并加在原中心像素上,就可以实现图像的锐化处理。
Laplacian算子的八邻域模板如下:
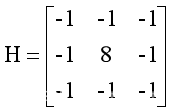
其像素的计算公式可以简化为:

Python和OpenCV将Laplacian算子封装在Laplacian()函数中,其函数原型如下所示:
- dst = Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src表示输入图像
– dst表示输出的边缘图,其大小和通道数与输入图像相同
– ddepth表示目标图像所需的深度
– ksize表示用于计算二阶导数的滤波器的孔径大小,其值必须是正数和奇数,且默认值为1,更多详细信息查阅getDerivKernels
– scale表示计算拉普拉斯算子值的可选比例因子。默认值为1,更多详细信息查阅getDerivKernels
– delta表示将结果存入目标图像之前,添加到结果中的可选增量值,默认值为0
– borderType表示边框模式,更多详细信息查阅BorderTypes
注意,Laplacian算子其实主要是利用Sobel算子的运算,通过加上Sobel算子运算出的图像x方向和y方向上的导数,得到输入图像的图像锐化结果。
同时,在进行Laplacian算子处理之后,还需要调用convertScaleAbs()函数计算绝对值,并将图像转换为8位图进行显示。其算法原型如下:
- dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src表示原数组
– dst表示输出数组,深度为8位
– alpha表示比例因子
– beta表示原数组元素按比例缩放后添加的值
当ksize=1时,Laplacian()函数采用3×3的孔径(四邻域模板)进行变换处理。下面的代码是采用ksize=3的Laplacian算子进行图像锐化处理,其代码如下:
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('luo.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#拉普拉斯算法
dst = cv2.Laplacian(grayImage, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
#用来正常显示中文标签
plt.rcParams['font.sans-serif']=['SimHei']
#显示图形
titles = ['原始图像', 'Laplacian算子']
images = [lenna_img, Laplacian]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其运行结果如图2所示:

边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此需要采用滤波器来过滤噪声,并调用图像增强或阈值化算法进行处理,最后再进行边缘检测。下面是采用高斯滤波去噪和阈值化处理之后,再进行边缘检测的过程,并对比了四种常见的边缘提取算法。
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#读取图像
img = cv2.imread('luo.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化处理图像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯滤波
gaussianBlur = cv2.GaussianBlur(grayImage, (3,3), 0)
#阈值处理
ret, binary = cv2.threshold(gaussianBlur, 127, 255, cv2.THRESH_BINARY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#拉普拉斯算法
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
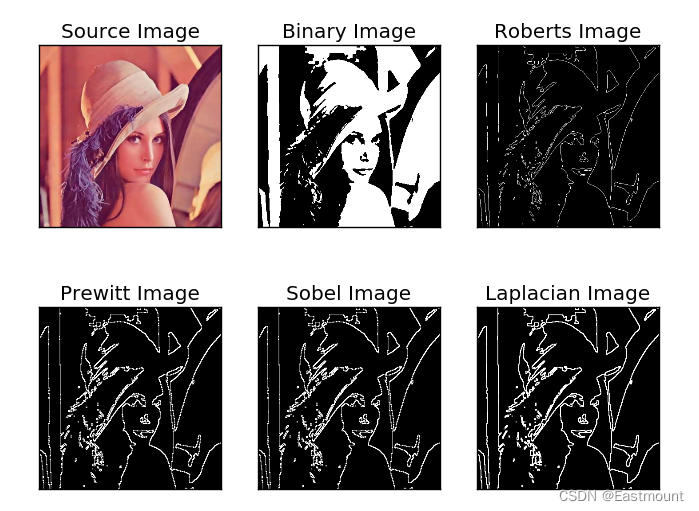
#效果图
titles = ['Source Image', 'Binary Image', 'Roberts Image',
'Prewitt Image','Sobel Image', 'Laplacian Image']
images = [lenna_img, binary, Roberts, Prewitt, Sobel, Laplacian]
for i in np.arange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
输出结果如图3所示。其中,Laplacian算子对噪声比较敏感,由于其算法可能会出现双像素边界,常用来判断边缘像素位于图像的明区或暗区,很少用于边缘检测;Robert算子对陡峭的低噪声图像效果较好,尤其是边缘正负45度较多的图像,但定位准确率较差;Prewitt算子对灰度渐变的图像边缘提取效果较好,而没有考虑相邻点的距离远近对当前像素点的影响;Sobel算子考虑了综合因素,对噪声较多的图像处理效果更好。
三.总结
本文主要介绍图像锐化和边缘检测知识,详细讲解了Sobel算子和Laplacian算子,并通过小珞珞图像进行边缘轮廓提取。图像锐化和边缘提取技术可以消除图像中的噪声,提取图像信息中用来表征图像的一些变量,为图像识别提供基础。
参考文献:
- [1] 冈萨雷斯著,阮秋琦译. 数字图像处理(第3版)[M]. 北京:电子工业出版社,2013.
- [2] 阮秋琦. 数字图像处理学(第3版)[M]. 北京:电子工业出版社,2008.
- [3] 杨秀璋,于小民,范郁锋,李娜. 基于苗族服饰的图像锐化和边缘提取技术研究[J]. 现代计算机,2018-10.
- [4] Eastmount. [Python图像处理] 四.图像平滑之均值滤波、方框滤波、高斯滤波及中值滤波[EB/OL]. (2018-09-02). https://blog.csdn.net/Eastmount/article/details/82216380.
- [5] Eastmount. [数字图像处理] 七.MFC图像增强之图像普通平滑、高斯平滑、Laplacian、Sobel、Prewitt锐化详解[EB/OL]. (2015-06-08). https://blog.csdn.net/eastmount/article/ details/46378783.
- [6] DSQiu. 图像锐化(增强)和边缘检测[EB/OL]. (2012-08-20). https://dsqiu.iteye.com/blog/1638589.https://blog.csdn.net/poem_qianmo/article/details/23184547.
- [7] C. Tomasi, R Manduchi. Bilateral Filtering for Gray and Color images[C]. Proceedings of the IEEE International Conference on Computer Vision, Bombay, India. 1998:839-846.
Python从0到1丨详解图像锐化的Sobel、Laplacian算子的更多相关文章
- Python从0到1丨细说图像增强及运算
摘要:本文主要讲解常见的图像锐化和边缘检测方法,即Roberts算子和Prewitt算子. 本文分享自华为云社区<[Python从零到壹] 五十七.图像增强及运算篇之图像锐化Roberts.Pr ...
- Python图像处理丨详解图像去雾处理方法
摘要:本文主要讲解ACE去雾算法.暗通道先验去雾算法以及雾化生成算法. 本文分享自华为云社区<[Python图像处理] 三十.图像预处理之图像去雾详解(ACE算法和暗通道先验去雾算法)丨[拜托了 ...
- Python从零到壹丨详解图像平滑的两种非线性滤波方法
摘要:本文将详细讲解两种非线性滤波方法中值滤波和双边滤波. 本文分享自华为云社区<[Python从零到壹] 五十六.图像增强及运算篇之图像平滑(中值滤波.双边滤波)>,作者: eastmo ...
- 【Matplotlib】详解图像各个部分
首先一幅Matplotlib的图像组成部分介绍. 在matplotlib中,整个图像为一个Figure对象.在Figure对象中可以包含一个或者多个Axes对象.每个Axes(ax)对象都是一个拥有自 ...
- Python学习一:序列基础详解
作者:NiceCui 本文谢绝转载,如需转载需征得作者本人同意,谢谢. 本文链接:http://www.cnblogs.com/NiceCui/p/7858473.html 邮箱:moyi@moyib ...
- Python学习二:词典基础详解
作者:NiceCui 本文谢绝转载,如需转载需征得作者本人同意,谢谢. 本文链接:http://www.cnblogs.com/NiceCui/p/7862377.html 邮箱:moyi@moyib ...
- python 3.x 爬虫基础---Urllib详解
python 3.x 爬虫基础 python 3.x 爬虫基础---http headers详解 python 3.x 爬虫基础---Urllib详解 前言 爬虫也了解了一段时间了希望在半个月的时间内 ...
- python中argparse模块用法实例详解
python中argparse模块用法实例详解 这篇文章主要介绍了python中argparse模块用法,以实例形式较为详细的分析了argparse模块解析命令行参数的使用技巧,需要的朋友可以参考下 ...
- python selenium 三种等待方式详解[转]
python selenium 三种等待方式详解 引言: 当你觉得你的定位没有问题,但是却直接报了元素不可见,那你就可以考虑是不是因为程序运行太快或者页面加载太慢造成了元素不可见,那就必须要加等待 ...
- python设计模式之迭代器与生成器详解(五)
前言 迭代器是设计模式中的一种行为模式,它提供一种方法顺序访问一个聚合对象中各个元素, 而又不需暴露该对象的内部表示.python提倡使用生成器,生成器也是迭代器的一种. 系列文章 python设计模 ...
随机推荐
- 蜂窝移动通信(IOT)接入流程
蜂窝物联网 蜂窝物联网(Cellular IoT)就是使用现有的蜂窝网络连接物联网设备而形成的物联网,是一种将物理设备与互联网连接起来的方式.通过蜂窝物联网,人们将一些物理设备--如传感器-- ...
- 记一次BootCDN被黑产挂马导致站点跳转博彩网站的问题
近期发现公司某些站点出现偶尔跳转博彩网站的现象,经过排查发现该现象为供应链投毒攻击,BootCDN上的静态资源无一例外均被污染, 当外站引入BootCDN的静态资源时,如果请求携带的Referer头为 ...
- 【IntelliJ】添加javaweb、tomcat语法支持
默认情况下:idea不支持javaweb的语法 但,我们的期望是: 解决方法:配置tomcat如下: (假设你已经配置好了tomcat)接下来: 1.打开[项目结构(快捷键:Ctrl + Shift ...
- 曲线艺术编程 coding curves 第十章 螺旋曲线(SPIRALS)
原作:Keith Peters https://www.bit-101.com/blog/2022/11/coding-curves/ 译者:池中物王二狗(sheldon) 源码:github: ht ...
- Dash应用页面整体布局技巧
本文示例代码已上传至我的Github仓库:https://github.com/CNFeffery/dash-master 大家好我是费老师,对于刚上手dash应用开发的新手朋友来说,如何进行合理且美 ...
- 脱发秘籍:前端Chrome调试技巧汇总
Chrome浏览器调试工具的核心功能: 注:本文测试.截图均为Edge浏览器(内核是Chromium),浏览器内核可了解<有哪些浏览器/内核?> 00.基础操作汇总 操作类型 快捷键/说明 ...
- 瞬间抠图!揭秘 ZEGO 绿幕抠图算法背后的技术
抠图是图像处理中最常见的操作之一,指的是将图像中需要的部分从画面中精确的提取出来. 抠图的主要功能是为了后期的合成做准备.在 Photoshop 中,抠图的方法有很多种,最常见的有通道抠图.蒙版抠图. ...
- 即构微信小程序直播组件是什么?有哪些功能?哪些小程序类目可以使用?
即构直播助手是微信官方认证的微信小程序插件,为开发者提供便捷.强大的微信小程序音视频直播服务. 即构直播助手除了包含微信小程序下的音视频推拉流能力,还支持iOS.Android.Windows.Web ...
- 2023-07-20:假设一共有M个车库,编号1~M,时间点从早到晚是从1~T, 一共有N个记录,每一条记录如下{a, b, c}, 表示一辆车在b时间点进入a车库,在c时间点从a车库出去, 一共有K
2023-07-20:假设一共有M个车库,编号1 ~ M,时间点从早到晚是从1 ~ T, 一共有N个记录,每一条记录如下{a, b, c}, 表示一辆车在b时间点进入a车库,在c时间点从a车库出去, ...
- 学习 HBase
1 由来 HBase 应大数据而生,是Apache Hadoop项目孵化而来的一种NoSQL数据库,HBase 是 Hadoop Database 的简称. 它的出现有以下几个原因: 大数据时代的到来 ...