ROS Navigation中的map_server地图包功能和使用
博客参考 http://wiki.ros.org/map_server 和 https://www.ncnynl.com/archives/201708/1897.html
1. 安装map_server
sudo apt-get install ros-kinetic-map-server
2. 具体使用说明
map_server使得地图的数据变成 ros 的service 可以被调用。其中以两种方式存储。一个是yaml文件,他存储了数据的元数据。一个是image file 他编码了地图的占据性情况。其中 image file 中白色像素是空的,黑色像素是被占据的。色彩或者灰色的是被接受的。
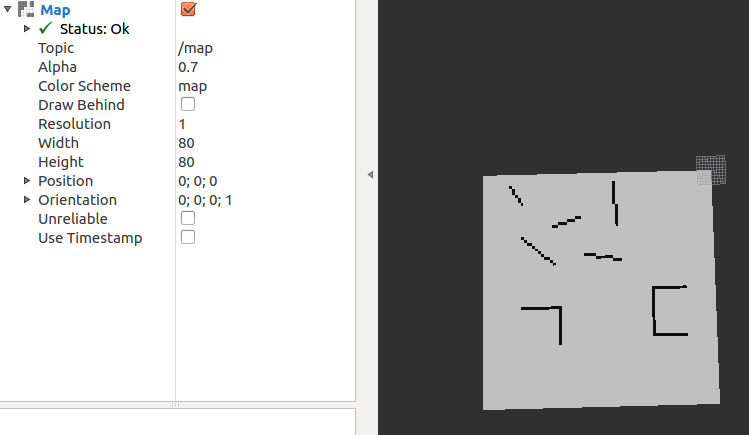
如上可以看到map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图,此图是rviz订阅/map服务可视化之后的结果
map_server概要
- map_server包提供了一个map_server ROS 节点, 该节点通过ROS 服务器方式提供地图数据。
- 该包还提供了map_saver命令行utility, 使用该工具可将动态创建的地图保存成文件。
地图格式
- 该包中的工具使用过的地图会被存储在两个文件中。
- 一个是YAML格式的文件描述地图meta-data并命名image文件。
- 另一个image文件用来编码occupancy data。
Image 格式
Image 指定包含occupancy data的image文件路径,可以是绝对路径,也可以是相对于YAML文件的对象路径
白色像素表示自由,黑色像素格表示占用,两种颜色之间的单元表示未知。
彩色和灰度图像都适合,但大多数地图是灰度图像(尽管它们存储的好像是以彩色的形式),YAML文件的阈值划分为3类;阈值是在map_server内部完成的。
比较阈值参数时,图像单元占用概率的计算如下:occ = (255 - color_avg) / 255.0 (color_avg是用8位数表示的来自于所有通道的平均值)。
如果图像是24位颜色,一个单元的颜色0x0a0a0a有一个0.96的概率,这是一个完全占用((255-(0*16+10))/255.0=0.96)。
如果像素颜色是0xeeeeee,则占用概率是0.07, 这意味着几乎没有被占用。
当ROS消息通信时,占用度被表示为范围为[0-100]的整数,0的意思完全是自由的,100的意思完全占用,特殊值-1完全未知。
Image data 通过 SDL_Image库读取,取决于sdl_image在特定平台上提供的内容,且支持多种格式。
一般来说,Image data 支持大多数流行的图像格式。
一个必须要注意的例外是PNG格式在OS X平台上不能被支持。
YAML格式
image: testmap.png
resolution: 0.1
origin: [0.0, 0.0, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
需要的字段:
image:指定包含occupancy data的image文件路径; 可以是绝对路径,也可以是相对于YAML文件的对象路径 。
resolution:地图分辨率,单位是meters/pixel 。
origin:图中左下角像素的二维位姿,如(x,y,yaw),yaw逆时针旋转(yaw=0表示没有旋转)。系统的很多部分现在忽略yaw值。
occupied_thresh:像素占用率大于这个阈值则认为完全占用。
free_thresh:像素占用率比该阈值小被则认为完全自由。
negate:无论白色或黑色,占用或自由,语义应该是颠倒的(阈值的解释不受影响)。
negate : Whether the white/black free/occupied semantics should be reversed (interpretation of thresholds is unaffected)
命令行工具
(1) Map_server
map_server是一个ROS 节点,可以从磁盘读取地图并使用ROS service提供地图。
目前实现的map_server可将地图中的颜色值转化成三种占用值: 自由 (0), 占用 (100), 和 未知 (-1).
这个工具的未来版本可能会使用0和100之间的值来表达更细致的占用度。
命令语法
rosrun map_server map_server mymap.yaml
可视化需要,roscore 和 rviz的配合
- 注意:map data可以通过指定topic或者 service来提取。service的方式最后可能要被废弃。
- 发布的主题
[map_metadata (nav_msgs/MapMetaData)][3]
- 通过指定话题获取地图的metadata
[map (nav_msgs/OccupancyGrid)][4]
通过指定话题获取地图
服务
static_map ([nav_msgs/GetMap][5])
通过该服务来获取地图
参数
~frame_id (string, default: "map")
- 设置已发布的地图的坐标系(The frame to set in the header of the published map. )
(2) map_saver
map_saver可以把地图保存到磁盘。 例如:从SLAM mapping 服务中保存.
命令语法
rosrun map_server map_saver [-f mapname]
Map_saver获取地图数据,并把它写到map.pgm和map.yaml。
使用-f选项为指定地图的存放目录和名称。
- 命令示例
rosrun map_server map_saver -f /home/xxx/map/mm
/home/xxx/map/为地图目录路径,mm为地图名称,生成后得到mm.yaml和mm.pgm两个文件
订阅话题
map (nav_msgs/OccupancyGrid)
- 通过指定话题来获取地图
参考资料:
- http://wiki.ros.org/map_server
- http://blog.csdn.net/x_r_su/article/details/53392272
- http://blog.csdn.net/w383117613/article/details/46860075
ROS Navigation中的map_server地图包功能和使用的更多相关文章
- 利用HBuilder开发基于MUI的H5+ app中使用百度地图定位功能
定位功能有两种方法: 首先要初始化内置地图: var map = new plus.maps.Map("map"); 这里黄色的map是html里面的id: <div id= ...
- Android 百度地图开发(一)--- 申请API Key和在项目中显示百度地图
标签: Android百度地图API Key 分类: Android 百度地图开发(2) 最近自己想研究下地图,本来想研究google Map,但是申请API key比较坑爹,于是从百度地 ...
- 如何在BI中增加“路线地图”并进行数据分析?
随着客户的需求越来越"百变",最近在做大屏设计的葡萄陷入了困境. 近期客户提出的需求是想在BI工具中增加 "路线地图"展示功能并进行数据分析. 不仅如此,这个& ...
- ros navigation stack 各个包的作用
nav_core 该包定义了整个导航系统关键包的接口函数,包括base_global_planner, base_local_planner以及recovery_behavior的接口.里面的函数全是 ...
- (十八)WebGIS中清空功能和地图定位功能的设计以及实现
文章版权由作者李晓晖和博客园共有,若转载请于明显处标明出处:http://www.cnblogs.com/naaoveGIS/. 1.背景 当地图中增加了很多元素后,对不同的元素需要进行一定的控制,最 ...
- AngularJS进阶(十九)在AngularJS应用中集成百度地图实现定位功能
在AngularJS应用中集成百度地图实现定位功能 注:请点击此处进行充电! 前言 根据项目需求,需要实现手机定位功能,考虑到百度业务的强大能力,遂决定使用百度地图第三方服务. 添加第三方模块的步骤与 ...
- map_server地图服务器
http://wiki.ros.org/map_server 概述 map_server提供map_server ROS节点,它提供地图数据作为一个ROS服务器.也提供map_saver命令行功能,能 ...
- 在ionic/cordova中使用百度地图插件
在ionic项目中,如果想实现定位功能,可以使用ng-cordova提供的cordova-plugin-geolocation. 但由于高墙的缘故,国内andorid环境下,此插件不起作用(ios环境 ...
- 在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~
在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~ 不需要额外购买GPS设备. 将手机GPS数据通过蓝牙传输给计算机使用,当然通过类似方 ...
随机推荐
- Buildroot MariaDB替代MySQL
/********************************************************************************* * Buildroot Maria ...
- CF1082D:Maximum Diameter Graph (简单构造)
Graph constructive problems are back! This time the graph you are asked to build should match the fo ...
- Mac 终端下Homebrew的几个常用命令(新手笔记)
最近在研究用appium来做IOS的自动化,所以开始接触Mac系统.记录一下在Mac的终端下Homebrew的几个常用命令 安装(需要 Ruby,不过一般自带都有):ruby -e "$(c ...
- JavaBean和Map的相互转换
JavaBean和Map的相互转换 一.JavaBean 1.什么是JavaBean? JavaBean其实就是一种遵循特定写法的类,必须遵循一定的规范: 类必须由public修饰,并且保证有公共的无 ...
- oracle10g精简版安装步骤
Feng218 假设出现例如以下错误: 最好把360安全卫士全关了.再安装下.就没事了 然后安装完了进入时输入username:sys或者system password就是自己设好的passwo ...
- Log4j(1)--hellloworld
创建项目: 使用的是log4j-1.2.17.jar: log4j.properties: log4j.rootLogger=DEBUG, Console ,File #Console log4j.a ...
- Bootstrap-Plugin:提示工具(Tooltip)插件
ylbtech-Bootstrap-Plugin:提示工具(Tooltip)插件 1.返回顶部 1. Bootstrap 提示工具(Tooltip)插件 当您想要描述一个链接的时候,提示工具(Tool ...
- 学习笔记之Tips for Macbook
写给Mac新手的入门指南 - 威锋网 https://mp.weixin.qq.com/s/pqmqGZhNwevx57KeLnzZmg https://bbs.feng.com/read-htm-t ...
- mysql安装过程及注意事项
1.1. 下载: 我下载的是64位系统的zip包: 下载地址:https://dev.mysql.com/downloads/mysql/ 下载zip的包: 下载后解压:D:\软件安装包\mysql- ...
- 关于oracle数据库启动报ORA-01122,ORA-01110,ORA-01203错误的解决方法
ORACLE 数据库空间裸设备出问题了,启动oracle失败,解决方法问题现象: 启动ORACLE的时候报如下的错误: Database mounted. ORA-01 ...