【Matlab】简单的滑模控制程序及Simulink仿真
文章:
这篇文章仿真和输出U的推到有些问题,博主根据此篇文章进行修改进行对sin(t)曲线的追踪(使用滑模控制)
1.前言
最近开始了对滑模控制的学习,使用的书籍为刘金琨的《滑膜变结构控制MATLAB仿真》,今天是按照书上的例程做了一个简单的自适应控制系统。
2.程序解析
此程序中,电机控制系统的动态模型为:
 ,其中,θ为电机的角位置,J为转动惯量,d(t)为干扰且满足
,其中,θ为电机的角位置,J为转动惯量,d(t)为干扰且满足 ,η为干扰上界,
,η为干扰上界, 为角位置跟踪误差
为角位置跟踪误差
定义跟踪误差函数,也就是滑模面函数s为: ,当s=0时,有e和edot都为0,且是按照指数收敛:
,当s=0时,有e和edot都为0,且是按照指数收敛:
也就是说当时间趋于∞时,误差将指数收敛到0,收敛速度取决于c,所以误差函数s的收敛性意味着位置跟踪误差e和速度跟踪误差e'的收敛性,也就是说:s为滑膜函数。
2.1.控制器代码
首先是控制器的S函数。控制器就是系统的输入控制量u:
function [sys,x0,str,ts] = simple_adaptive_controller(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数 sizes = simsizes; sizes.NumContStates = 0; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 1; %输出变量个数
sizes.NumInputs = 3; %输入变量个数
sizes.DirFeedthrough = 1; %输入信号是否在输出端出现
sizes.NumSampleTimes = 0; % at least one sample time is needed sys = simsizes(sizes);
x0 = []; %初始值
str = [];
ts = []; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState'; function sys=mdlOutputs(t,x,u) %计算输出子函数 J = 2;
thd = u(1);
th = u(2);
dth = u(3); e = th - thd;
de = dth;
c = 10;
s = c*e + de;
xite = 1.1; k = 0;
ut = J*(-c*dth-1/J*(k*s+xite*sign(s)));
sys(1) = ut;
因为控制器不涉及到复杂的微分运算,故只用在mdlOutputs中写控制输入u的代码
2.2.受控对象代码
本例中,受控对象为电机控制系统,,需要对这个微分方程进行描述,因为要用到θ、θ',虽然方程中有θ'',但是可以通过除以J得到θ''的表达式,故代码如下:
function [sys,x0,str,ts] = plant(t, x, u, flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes; % 调用初始化子函数
case 1,
sys=mdlDerivatives(t,x,u); %调用计算微分子函数
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u); %计算输出子函数
case 4,
sys=[]; %计算下一仿真时刻子函数
case 9,
sys=[]; %终止仿真子函数
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag)); end function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes %初始化子函数 sizes = simsizes; sizes.NumContStates = 2; %连续状态变量个数
sizes.NumDiscStates = 0; %离散状态变量个数
sizes.NumOutputs = 2; %输出变量个数
sizes.NumInputs = 1; %输入变量个数
sizes.DirFeedthrough = 0; %输入信号是否在输出端出现
sizes.NumSampleTimes = 1; % at least one sample time is needed sys = simsizes(sizes);
x0 = [0, 0]; %初始值
str = [];
ts = [0 0]; %[0 0]用于连续系统,[-1 0]表示继承其前的采样时间设置
simStateCompliance = 'UnknownSimState'; function sys = mdlDerivatives(t, x, u) %计算微分子函数
J = 2;
dt = sin(t);
ut = u(1);
sys(1) = x(2);
sys(2) = 1/J*(ut+dt); function sys=mdlOutputs(t,x,u) %计算输出子函数
sys(1) = x(1);
sys(2) = x(2);
3.仿真结果和Simulink注意事项
Simulink建立如下模型:
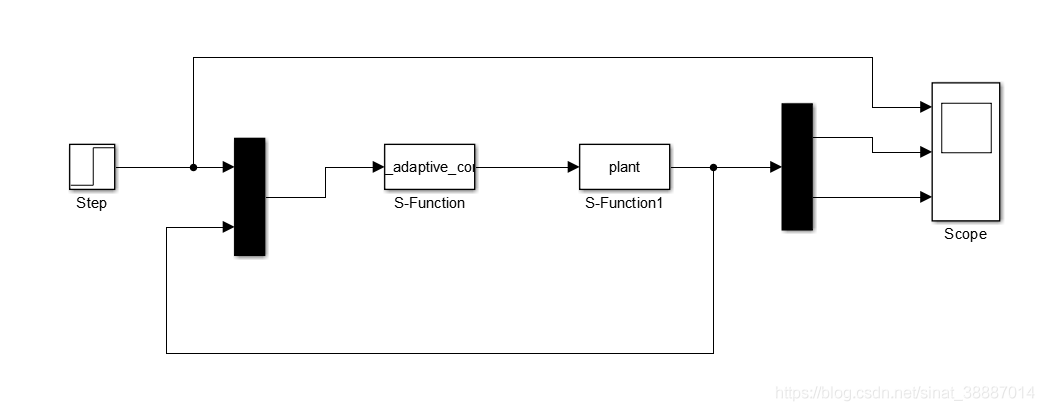
将微分方程算法换为定步长fixed step中的ode4!不然仿真超级慢!
具体分析可见:https://www.ilovematlab.cn/thread-260054-1-1.html
最后结果为:
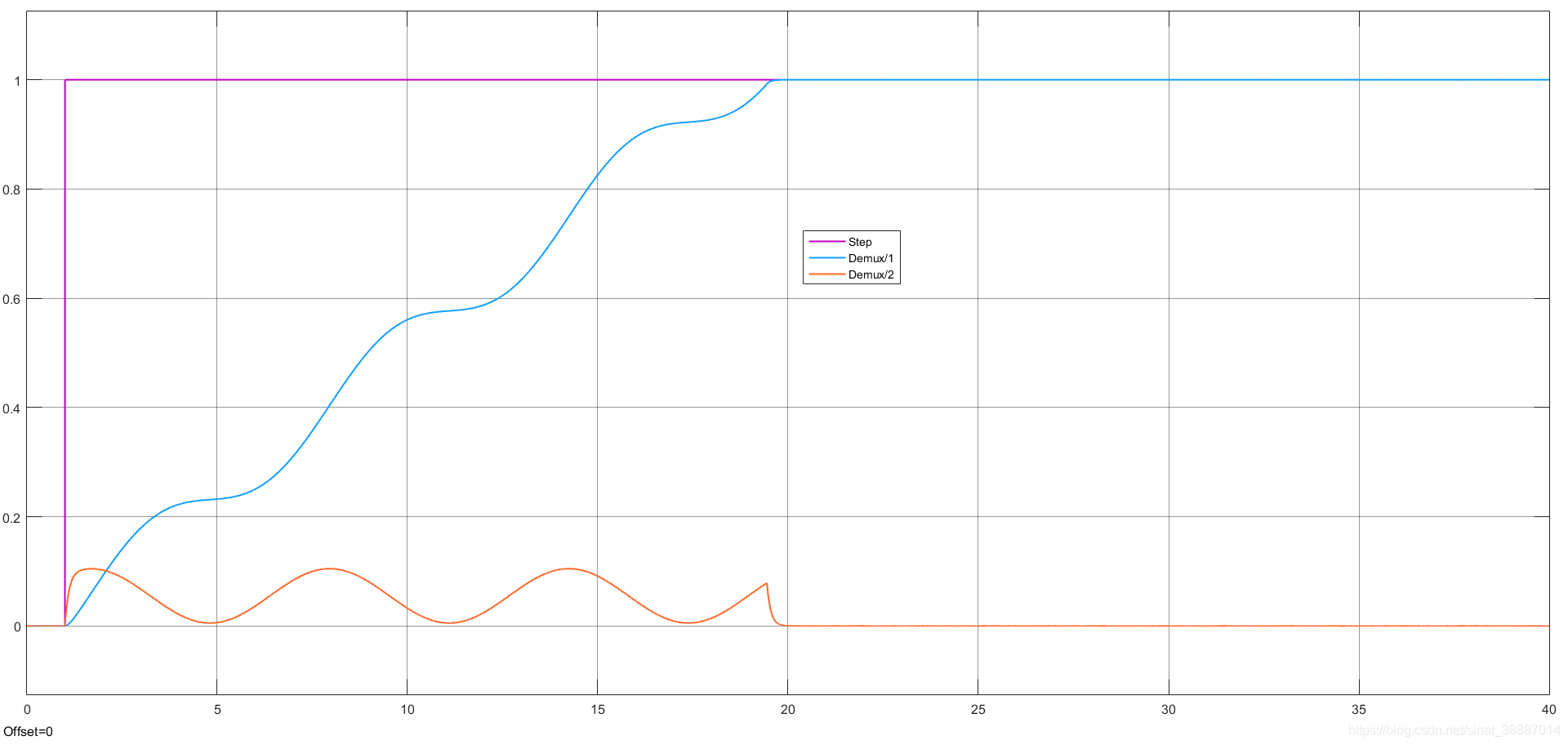
系统最终能够跟踪阶跃信号
————————————————
版权声明:本文为CSDN博主「PriscillaSCU」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/sinat_38887014/article/details/103115218
【Matlab】简单的滑模控制程序及Simulink仿真的更多相关文章
- 使用滑模控制对sin(t)曲线追踪
结合:[Matlab]简单的滑模控制程序及Simulink仿真本片文章观看,此篇文章是在这篇文章的基础上进行修改的 输出u的推导过程 如果不明白控制量输出u的推到过成请看:[控制理论]滑模控制最强解析 ...
- 非刚性图像配准 matlab简单示例 demons算法
2011-05-25 17:21 非刚性图像配准 matlab简单示例 demons算法, % Clean clc; clear all; close all; % Compile the mex f ...
- matlab 调用C程序进行simulink仿真
文章目录 simulink仿真 创建C程序 编译C程序 运行结果 simulink仿真 simulink仿真中需要使用S-Function模块,可以实现调用C程序进行仿真,下面先建立一个简单的仿真: ...
- MATLAB 右键该文件不存在或者SIMULINK打开后仿真器件报错
错误示例: 提示是否创建文件 并且会提示某某模块或者某某文件未找到not found 原因: .m文件不存在,是因为所打开的文件还并没有添加进matlab的搜索目录,或者是需要.m文件运行后生成的 某 ...
- MATLAB设计模糊控制器并用simulink仿真
一.设计模糊控制器1.1 创建项目文件夹在此路径如图 1.2 打开MATLAB打开MATLAB R2012a切换当前目录为上一步路径,如图 1.3 设计模糊控制器打开模糊控制器设计对话框 根据模糊控制 ...
- 车辆跟随滑模控制的python实现
上一篇文章一个汽车跟踪问题的滑模控制实例,已经从理论上证明了可以使用滑模变结构控制策略来解决汽车跟踪问题. 下面分别采用指数趋近律.等速趋近律.准滑模控制的方法完成车辆跟随问题的仿真 import m ...
- Simulink仿真入门到精通(二) Simulink模块
2.1 Simulink模块的组成要素 用户构建系统模型时无需直接面对成千上万行的代码,而是通过模块化图形界面以模块化的方式构建,能够使理解变得容易,让大脑减负.通过层次化模块分布将系统功能模块化,而 ...
- Simulink仿真入门到精通(十九) 总结回顾&自我练习
从2019年12月27到2020年2月12日,学习了Simulink仿真及代码生成技术入门到精通,历时17天. 学习的比较粗糙,有一些地方还没理解透彻,全书梳理总结: Simulink的基础模块已基本 ...
- 震荡信号Simulink仿真
1. simulink仿真设计 震荡信号本质是调制信号,可以表示为: u(t)=A*(1+m*cos(Ωt+θ))*cos(ωt+φ)=A*cos (ωt+φ)+ A*m*cos(Ωt+θ)*cos( ...
随机推荐
- LINUX服务器常用命令
转至:https://my.oschina.net/7shell/blog/70508 常用命令 查看所有80端口的连接数 1. netstat -nat|grep -i "80" ...
- VSCode 安装Vue 插件 - vetur
想要编辑器识别vue文件需要安装vue插件,在VSCode上好用的是vetur 如下图:(如果没有安装就会出现安装按钮,点击进行安装) 安装完成之后,重启VSCode,就能识别vue文件了,方便我们编 ...
- python面试_总结01_概念和内置高阶函数
- 简答题 1.请谈谈Python中is 和 == 的区别(代码演示) is用于比较两个变量是否引用了同一个内存地址,is表示的是对象标识符(object identity),作用是用来检查对象的标识 ...
- 2022最新IntellJ IDEA诺依开发部署文档
前景提示 若伊是国内一款很好的开源项目,非常的便于学习,而且它是开源免费的,但是,它的开发部署文档实在是没法按照那个文档,快速高效的在本地搭建一套可以运行的项目,对于学习开发和使用实在是一大难题,为此 ...
- Pytorch中pad函数toch.nn.functional.pad()的用法
padding操作是给图像外围加像素点. 为了实际说明操作过程,这里我们使用一张实际的图片来做一下处理. 这张图片是大小是(256,256),使用pad来给它加上一个黑色的边框.具体代码如下: 1 2 ...
- 服务器安装centos8提示显示器不支持输出的分辨率
今天机房老服务器安装CENTOS8时启到到引导界面,显示器就提输出分辩率为1920*1080 60MHZ ,这怎么能支持.本想装了显卡来装,拆机一看我去不支持. 后来在网上一查才知道有解决方案. 可以 ...
- LGP5363题解
感觉博弈题都是高大上神秘结论... 感谢@KaiSuoShuTong 开锁疏通愿意教我这题的博弈部分/qq 考虑每次移动棋子,实际上是有一车 \(a_i\),每次操作相当于令 \(a_i-c,a_{i ...
- LGP5795题解
首先 \(k\) 大容易让我们想到 主席树&树套树&整体二分,而异或又让我们想到 01-Trie. 所以就有一个很明显的二分,二分一个 mid 看有多少个数不大于 mid. 然后发现 ...
- 一比一还原axios源码(八)—— 其他功能
到此,我们完成了axios的绝大部分的功能,接下来我们来补全一下其他的小功能. 一.withCredentials 这个参数可以可以表明是否是一个跨域的请求.那这个的使用场景是啥呢?就是我们在同域的 ...
- python 程序小练习
print("Type integers,each followed by Enter; or just Enter to finish") total = 0 count = 0 ...