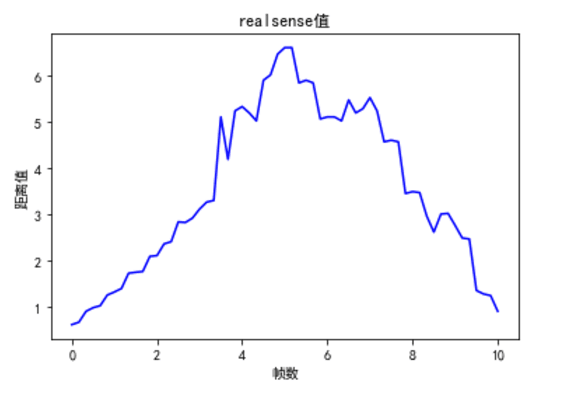
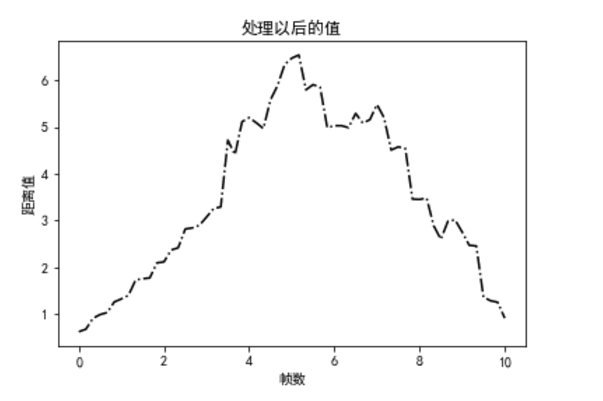
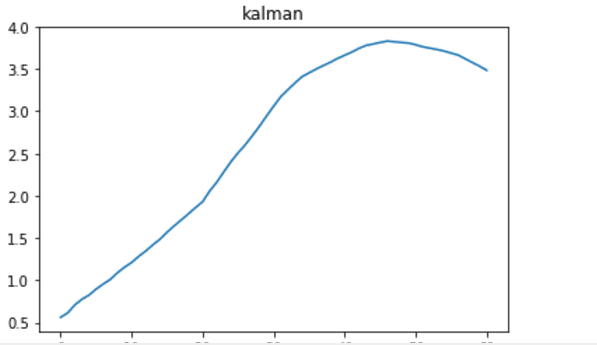
kalman处理realsense数据
代码来自:https://www.cnblogs.com/zjuhjm/archive/2012/12/29/2838472.html
import numpy as np
import matplotlib.pyplot as plt
Q = 0.00001
R = 0.1
P_k_k1 = 1
Kg = 0
P_k1_k1 = 1
x_k_k1 = 0
ADC_OLD_Value = 0
kalman_adc_old = 0
def kalman(ADC_Value):
global kalman_adc_old
global P_k1_k1
Z_k = ADC_Value
if (abs(kalman_adc_old-ADC_Value)>=30):
x_k1_k1= ADC_Value*0.382 + kalman_adc_old*0.618
else:
x_k1_k1 = kalman_adc_old;
x_k_k1 = x_k1_k1
P_k_k1 = P_k1_k1 + Q
Kg = P_k_k1/(P_k_k1 + R)
kalman_adc = x_k_k1 + Kg * (Z_k - kalman_adc_old)
P_k1_k1 = (1 - Kg)*P_k_k1
P_k_k1 = P_k1_k1
ADC_OLD_Value = ADC_Value
kalman_adc_old = kalman_adc
return kalman_adc
a= [100]*200
array = np.array(a)
s = np.random.normal(0, 25, 200)
#test_array = array + s
test_array = [0.618,0.672,0.905,0.985,1.028,1.255,1.320,1.396,1.724,1.753,1.769,2.091,2.113,2.367,2.414,2.817,2.840,2.897,3.073,3.254,3.289,4.717,4.407,5.113,5.200,5.091,4.967,5.580,5.888,6.338,6.473,6.542,5.795,5.907,5.850,4.987,5.028,5.028,4.987,5.291,5.084,5.156,5.481,5.200,4.507,4.575,4.541,3.457,3.450,3.477,2.884,2.596,2.983,3.012,2.753,2.468,2.453,1.358,1.281,1.249,0.908]
plt.plot(test_array)
adc=[]
for i in range(len(test_array)):
adc.append(kalman(test_array[i]))
plt.plot(adc)
plt.title('kalman')
#plt.plot(array)
kalman处理realsense数据的更多相关文章
- [stm32] MPU6050 HMC5883 Kalman 融合算法移植
一.卡尔曼滤波九轴融合算法stm32尝试 1.Kalman滤波文件[.h已经封装为结构体] /* Copyright (C) 2012 Kristian Lauszus, TKJ Electronic ...
- 【滤波】标量Kalman滤波的过程分析和证明及C实现
摘要: 标量Kalman滤波的过程分析和证明及C实现,希望能够帮助入门的小白,同时得到各位高手的指教.并不涉及其他Kalman滤波方法. 本文主要参考自<A Introduction to th ...
- 理解Kalman滤波的使用
Kalman滤波简介 Kalman滤波是一种线性滤波与预测方法,原文为:A New Approach to Linear Filtering and Prediction Problems.文章推导很 ...
- 卡尔曼滤波器 Kalman Filter (转载)
在学习卡尔曼滤波器之前,首先看看为什么叫“卡尔曼”.跟其他著名的理论(例如傅立叶变换,泰勒级数等等)一样,卡尔曼也是一个人的名字,而跟他们不同的是,他是个现代人! 卡 尔曼全名Rudolf Emil ...
- 【转】Intel RealSense(实感技术)概览
Intel RealSense(实感技术)概览 1 Reply 版权声明:本文系本站作者自己翻译整理,欢迎转载,但转载请以超链接形式注明文章来源(planckscale.info).作者信息和本声明, ...
- 学习OpenCV——Kalman滤波
背景: 卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器), 它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态.卡尔曼滤波的一个典型实例是从一组有限的,包含噪声的,对物体位置的观察序列(可 ...
- 卡尔曼滤波—Simple Kalman Filter for 2D tracking with OpenCV
之前有关卡尔曼滤波的例子都比较简单,只能用于简单的理解卡尔曼滤波的基本步骤.现在让我们来看看卡尔曼滤波在实际中到底能做些什么吧.这里有一个使用卡尔曼滤波在窗口内跟踪鼠标移动的例子,原作者主页:http ...
- Realsense 提取彩色和深度视频流
一.简要介绍 关于realsense的介绍,网上很多,这里不再赘述,sdk及相关文档可参考realsense SDK,也可参考开发人员专区. 运行代码之前,要确保你已经安装好了realsense的DC ...
- Realsense 人脸识别
一.代码声明 下面的代码是博主参考了Intel realsense官方SDK和官方例程后写的一段较为简单的代码,实现了简单的多人脸实时检测及跟踪功能.官方的人脸检测例程功能较多,但代码量很大,阅读起来 ...
随机推荐
- JavaFX 之窗口拖动(三)
一.问题场景 在上一篇中,我们将窗口的默认标题栏隐藏从而导致鼠标点击窗体无法进行拖动. 二.解决思路 给组件添加鼠标按下事件监听器和鼠标拖动事件监听器. 三.代码实现 /** * 程序入口 * @au ...
- JMeter代码小Demo(Java)
一.使用Eclipse进行项目编写 1.使用eclipse,新建项目名字为:TestNumber,包名为:test,类名为:TestNum 2.在JMeter的安装目下下lib/ext中copy2个j ...
- Error[Li006]: duplicate definitions for "******"
今天参考别人程序写程序时出现Error[Li006]: duplicate definitions for "******". 参考程序中将变量和数据定义在(.h)文件中,我也就直 ...
- CentOS 7安装chroot Named
一 安装相关软件 yum install bind-chroot bind -y 二 复制生成文件 cp -R /usr/share/doc/bind-*/sample/var/named/* /va ...
- Erlang generic standard behaviours -- gen_server hibernate
hibernate 主要用于在内存空闲时,通过整理进程的stack,回收进程的heap 来达到回收内存节省资源的效果. hibernate 可用于OTP 进程以及普通进程, hibernate 的官方 ...
- 初学FPGA一些建议
数字电路: 这是大学里的基本课程 ,涵盖了一般数字电路的组合电路.时序电路.寄存器传输.储存器以及可编程逻辑电路(FPGA 就是其中一种),还有比较好的添加了计算机的指令集结构.处理器设计等计算机方面 ...
- python(ValueError: invalid literal for int() with base 10: 'abc' ‘1.0‘’’)强制类型转换
int()函数只能转化数字组成的字符串,看例子: >>> a=' >>> int(a) 123 >>> b='abc' >>> ...
- Macbook Pro上C++编程
Xcode新建一个c/c++程序语言工程_百度经验 http://jingyan.baidu.com/article/e2284b2b63bdede2e6118d2a.html
- 1106 Lowest Price in Supply Chain
题意:略 思路:寻找树的叶结点中深度最低的,记录最低深度minDepth和具有相同最低深度的结点个数cnt. 代码: #include <cstdio> #include <cmat ...
- ROS的ovpn设置
转摘至www.80uncle.com 先下载Win下的openvpn客户端http://openvpn.se/download.html 我的证书是用这个客户端做的openvpn-2.0.9-gui- ...