Ubuntu利用ROS搭建手机移动网络摄像头(Android)
| PC -> Ubuntu 16.04 - > ROS Kinetic |
| Android系统手机 |
1、Android移动端APP下载安装
配置手机端:(一般默认即可RTSP)
2、源码下载(rocon_devices_kinetic)
将文件解压在catkin_ws/src文件夹;
3、编译
catkin_make
4、配置
source xxx/devel/setup.bash (×××是路径)
5、查看手机端接口,并配置
export ROCON_RTSP_CAMERA_RELAY_URL=rtsp://×××:5540/ch0 (×××是IP)
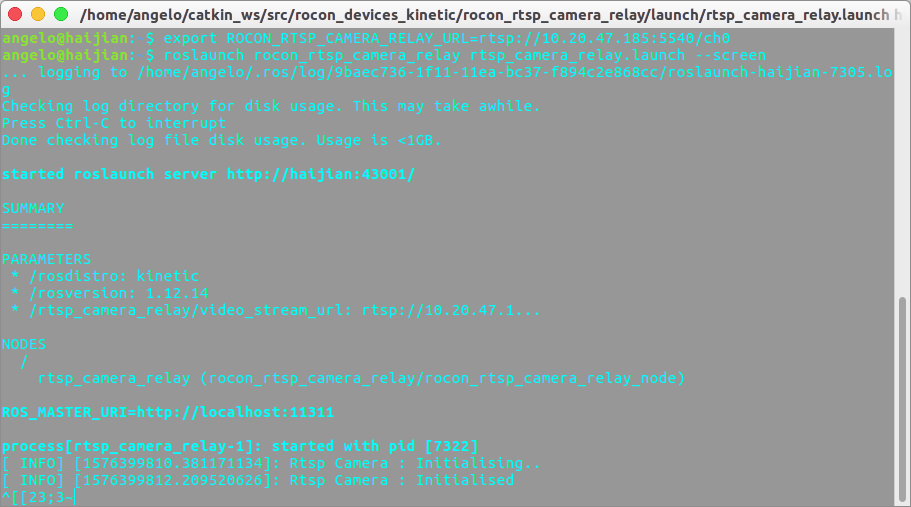
6、运行驱动
roslaunch rocon_rtsp_camera_relay rtsp_camera_relay.launch --screen
7、查看ros接口
rostopic list
/rosout
/rosout_agg
/rtsp_camera_relay/camera_info
/rtsp_camera_relay/image
/rtsp_camera_relay/image/compressed
/rtsp_camera_relay/image/compressed/parameter_descriptions
/rtsp_camera_relay/image/compressed/parameter_updates
/rtsp_camera_relay/image/compressedDepth
/rtsp_camera_relay/image/compressedDepth/parameter_descriptions
/rtsp_camera_relay/image/compressedDepth/parameter_updates
/rtsp_camera_relay/image/theora
/rtsp_camera_relay/image/theora/parameter_descriptions
/rtsp_camera_relay/image/theora/parameter_updates
/rtsp_camera_relay/status
8、数据可视化
rosrun image_view image_view image:=/rtsp_camera_relay/image

过程可能遇到错误:
error while loading shared libraries: libopencv_core3.so.3.3: cannot open shared object file: No such file or directory
解决方法:
①打开路径/etc/ld.so.conf.d
②创建文件OpenCV.conf
③在OpenCV.conf中写入:opencv文件夹lib的路径
④在终端执行命令:
sudo ldconfig
Ubuntu利用ROS搭建手机移动网络摄像头(Android)的更多相关文章
- 利用 Docker 搭建 IPFS 私有网络
利用 Docker 搭建 IPFS 私有网络 本文原始地址:https://sitoi.cn/posts/40630.html 下载项目 项目地址:https://github.com/Sitoi/p ...
- 利用 VMWare 搭建随机拓扑网络
这篇文章是计算机网络上机实验课的作业. 实验任务:利用 VMWare 搭建一个由 5 个主机组成的随机拓扑的网络.要求该网络中至少有 2 个子网,两个路由器 .实验的网络拓扑图如下: 网络中有两个路由 ...
- 利用CocoaHttpServer搭建手机本地服务器
原理 使用CocoaHTTPServer框架,在iOS端建立一个本地服务器,只要电脑和手机连入同一热点或者说网络,就可以实现通过电脑浏览器访问iOS服务器的页面,利用POST实现文件的上传. 实现 1 ...
- 基于opencv网络摄像头在ubuntu下的视频获取
基于opencv网络摄像头在ubuntu下的视频获取 1 工具 原料 平台 :UBUNTU12.04 安装库 Opencv-2.3 2 安装编译运行步骤 安装编译opencv-2.3 参 ...
- Ubuntu安装DroidCamX网络摄像头
1.安装依赖项 sudo apt-get install gcc make linux-headers-`uname -r` 2.安装 cd /tmp/ bits=`getconf LONG_BIT` ...
- Ubuntu虚拟机+ROS+Android开发环境配置笔记
Ubuntu虚拟机+ROS+Android开发环境配置笔记 虚拟机设置: 1.本地环境:Windows 7:VMWare:联网 2.虚拟环境 :Ubuntu 14.04. 比較稳定,且支持非常多ROS ...
- 安天透过北美DDoS事件解读IoT设备安全——Mirai的主要感染对象是linux物联网设备,包括:路由器、网络摄像头、DVR设备,入侵主要通过telnet端口进行流行密码档暴力破解,或默认密码登陆,下载DDoS功能的bot,运行控制物联网设备
安天透过北美DDoS事件解读IoT设备安全 安天安全研究与应急处理中心(安天CERT)在北京时间10月22日下午启动高等级分析流程,针对美国东海岸DNS服务商Dyn遭遇DDoS攻击事件进行了跟进分析. ...
- 如何在一个ubuntu系统上搭建SVN版本控制工具
有话说,由于公司项目部署需要,将Windows工程迁移到Linux,通过调查确定使用Ubuntu的Linux操作系统.那么如何快速搭建和Windows一样快捷方便的开发环境就很重要了.本文讲述如何在一 ...
- [原] 利用 OVS 建立 VxLAN 虚拟网络实验
OVS 配置 VxLAN HOST A ------------------------------------------ | zh-veth0(10.1.1.1) VM A | | ---|--- ...
随机推荐
- Kettle使用教程之安装与资源库的创建
1.安装JDK 本人使用的JDK版本是1.8,且必须要在系统的环境变量添加路径. 2.下载Kettle 目前稳定的版本是8.2,但是本人使用的是7.1版本,其下载的URL为:https://sourc ...
- hash模块MD5加密
MD5加密:获取32位加密字符串: 示例(MD5加密'123456')import hashlibhashObject=hashlib.md5(b'123456') #实例化,加密字符串不能直接加密, ...
- 【GNN】图神经网络小结
图神经网络小结 图神经网络小结 图神经网络分类 GCN: 由谱方法到空域方法 GCN概述 GCN的输出机制 GCN的不同方法 基于谱方法的GCN 初始 切比雪夫K阶截断: ChebNet 一阶Cheb ...
- 2019JAVA第九次实验报告
Java实验报告 班级 计科二班 学号 20188442 姓名 吴怡君 完成时间 2019.11.8 评分等级 课程总结 1.实验代码 package Domon8; import java.awt. ...
- nodejs版本控制:nvm use命令失效
Downloading npm version ... Download failed. Rolling Back. Rollback failed. remove C:\Users\Administ ...
- PTA(Basic Level)1010.一元多项式求导
设计函数求一元多项式的导数.(注:\(x^n\)(\(n\)为整数)的一阶导数为\(nx^{n−1}\).) 输入格式: 以指数递降方式输入多项式非零项系数和指数(绝对值均为不超过 1000 的整数) ...
- [转帖]linux学习问题总结
linux学习问题总结 https://www.cnblogs.com/chenfangzhi/p/10661946.html 学习作者的思路 目录 一.环境变量和普通变量的区别 二.rsyslog和 ...
- Vue 进阶系列(一)之响应式原理及实现
Vue 进阶系列(一)之响应式原理及实现:https://juejin.im/post/5bce6a26e51d4579e9711f1d Vue 进阶系列(二)之插件原理及实现:https://jue ...
- [gym101981D][2018ICPC南京D题]Country Meow
题目链接 题目大意是求三维空间可以包含$n$个点的最小圆半径. 如果有做过洛谷P1337就会发现这到题很模拟退火,所以就瞎搞一发. $PS:$注意本题时限$3$秒. #include<bits/ ...
- 洛谷 P3834 卢卡斯定理 题解
题面 首先你需要知道这条定理: C(n,m)=C(n%p,m%p)*C(n/p,m/p); 这样可以递归实现: 注意坑点:是C(n+m,m),并不是C(n,m); #include <bits/ ...