引擎设计跟踪(九.14.3.2) Deferred shading的后续实现和优化
最近完成了deferred shading和spot light的支持, 并作了一部分优化.
之前forward shading也只支持方向光, 现在也支持了点光源和探照光. 对于forward shading, 可以在渲染每个对象之前, 用对象的包围盒, 查询空间内的光源, 然后填入shader cosntant里. 因为空间一般是基于四叉树或者八叉树的划分, 所以查询不会慢.现在透明物体也能通过forward shading 正常光照了。
Deferred shading optimizations
1. Early Z & Early Stencil
上面的文章介绍了deferred shading的一些细节和优化方式, 其中提到了Early Z和early stencil.
对于early z来说, 只能裁掉一半的无效几何数据.如果是less/less qual, 那么光照范围后面的区域也会计算, 如果是greater/greater qual, 光照范围之前的区域也会参与lighting 计算(冗余计算,并没有效果).
early stencil的话需要把light volume加上stencil pass. 本来也打算使用stencil来优化, 过滤掉无效的区域.
后面看到这篇文章:
上面提到了几点, 其中提道stencil 写入的开销太大, 并不高效. 该文章的demo中使用的是early z.
2.Z culling in shader
由于上面使用了earlyz, 所以光照区域平均大概有一半无效的计算.
如果在shader里面根据深度,把另一半的无效区域做early out, 理论上效率会更好.
为了验证我的想法, 在上面intel的那个demo里面加上了几行简单的代码:
// One per quad - gets expanded in the geometry shader
struct GPUQuadVSOut
{
float4 coords : coords; // [min.xy, max.xy] in clip space
float quadZ : quadZ;
//Crazii
float quadMaxZ : quadMaxZ;
//-//Crazii
uint lightIndex : lightIndex;
}; GPUQuadVSOut GPUQuadVS(uint lightIndex : SV_VertexID)
{
GPUQuadVSOut output;
output.lightIndex = lightIndex; // Work out tight clip-space rectangle
PointLight light = gLight[lightIndex];
output.coords = ComputeClipRegion(light.positionView, light.attenuationEnd); // Work out nearest depth for quad Z
// Clamp to near plane in case this light intersects the near plane... don't want our quad to be clipped
float quadDepth = max(mCameraNearFar.x, light.positionView.z - light.attenuationEnd); // Project quad depth into clip space
float4 quadClip = mul(float4(0.0f, 0.0f, quadDepth, 1.0f), mCameraProj);
output.quadZ = quadClip.z / quadClip.w; //Crazii
//quadClip = mul(float4(0.0f, 0.0f, light.positionView.z + light.attenuationEnd, 1.0f), mCameraProj);
//output.quadMaxZ = quadClip.z / quadClip.w;
output.quadMaxZ = light.positionView.z + light.attenuationEnd;
//-Crazii return output;
} struct GPUQuadGSOut
{
float4 positionViewport : SV_Position;
// NOTE: Using a uint4 to work around a compiler bug. Otherwise the SV_SampleIndex input to the per-sample
// shader below gets put into a '.y' which doesn't appear to work on some implementations.
nointerpolation uint4 lightIndex : lightIndex;
//Crazii
nointerpolation float maxDepth : maxDpeth;
//-Crazii
}; // Takes point output and converts into screen-space quads
[maxvertexcount()]
void GPUQuadGS(point GPUQuadVSOut input[], inout TriangleStream<GPUQuadGSOut> quadStream)
{
GPUQuadGSOut output;
output.lightIndex = input[].lightIndex;
//Crazii
output.maxDepth = input[].quadMaxZ;
//-Crazii
output.positionViewport.zw = float2(input[].quadZ, 1.0f); // Branch around empty regions (i.e. light entirely offscreen)
if (all(input[].coords.xy < input[].coords.zw)) {
output.positionViewport.xy = input[].coords.xw; // [-1, 1]
quadStream.Append(output);
output.positionViewport.xy = input[].coords.zw; // [ 1, 1]
quadStream.Append(output);
output.positionViewport.xy = input[].coords.xy; // [-1, -1]
quadStream.Append(output);
output.positionViewport.xy = input[].coords.zy; // [ 1, -1]
quadStream.Append(output);
quadStream.RestartStrip();
}
} float4 GPUQuad(GPUQuadGSOut input, uint sampleIndex)
{
float3 lit = float3(0.0f, 0.0f, 0.0f); [branch] if (mUI.visualizeLightCount) {
lit = rcp(255.0f).xxx;
} else {
//Crazii
float zBuffer = gGBufferTextures[].Load(input.positionViewport.xy, sampleIndex).x;
float viewSpaceZ = mCameraProj._43 / (zBuffer - mCameraProj._33);
if (viewSpaceZ - input.maxDepth > )
clip(-);
//-Crazii
SurfaceData surface = ComputeSurfaceDataFromGBufferSample(uint2(input.positionViewport.xy), sampleIndex); // Avoid shading skybox/background pixels
// NOTE: Compiler doesn't quite seem to move all the unrelated surface computations inside here
// We could force it to by restructuring the code a bit, but the "all skybox" case isn't useful for
// our benchmarking anyways.
if (surface.positionView.z < mCameraNearFar.y) {
PointLight light = gLight[input.lightIndex.x];
AccumulateBRDF(surface, light, lit /*Crazii*/, true /*-Crazii*/);
}
} return float4(lit, 1.0f);
}
代码修改并不多: vertex shader里面计算view space z, 因为demo 使用了less equal, 所以需要加上额外的max z, 相当于shader里面手动做greater过滤(类似Depth Bounds Test).
最后的结果, 在730M上测试, 使用这种方式效率提高50%-100%,当灯光个数比较多的时候,deferred shading的效率会翻倍!, 当然比起tiled方法毕竟还是too young, 因为多个光源光照范围重合的部分, 仍然需要sampling和blending多次.
| GT 730M, 1280x720, scene: power plant | 64 Lights | 128 Lights | 256 Lights | 512 Lights | 1024 Lights |
| Tile based deferred shading | 188.5 FPS | 180.9 FPS | 160.6 FPS | 136.2 FPS | 106.8 FPS |
| Deferred shading | 169.5 FPS | 117 FPS | 56.9 FPS | 31.8 FPS | 17.16 FPS |
| Deferred shading + shader depth clip | 209 FPS | 170 FPS | 107.5 FPS | 71.5 FPS | 44.5 FPS |
all shader compild with flag D3DCOMPILE_OPTIMIZATION_LEVEL3
从上面可以看出, shader里使用zculling以后, 128盏灯光以前, deferred shading和tiled方式的性能差别不大 (如果是更低端的GPU, 可能会有差别, 而且要注意tile based方式并没有做任何优化).
分析: 因为shader里面做深度比较时, 只需要采样depth buffer, 如果不在范围内, 直接clip & return, 所以后面的采样和计算以及混合都不需要了.
顺便记录一下clip, 默认shader不开优化的时候, clip只是取消的像素blend到back buffer, shader还是会继续执行的, 除非手动添加上return,或者开启优化(D3DCOMPILE_OPTIMIZATION_LEVEL3).
而动态分支和clip对于SM3.0+以上都是更好的方式, 至少现有文档里面DX10及以上的API都是鼓励使用clip和分支, 来减少shader计算量.
如果不使用clip, 而是返回float4(0,0,0,0)虽然显示结果一样,但是效率会降低,因为还是要blend到backbuffer.
而旧的GPU, clip和branch反而可能导致shader divergence, 所以clip有可能只通知discard掉当前fragment, shader还是会照样执行.
还需要注意的是, 如果开启了depth write, clip会导致early Z 失效(这算是常识,原因不用备忘). 而在deferred shading这里, shading pass不会写深度, 所以没有问题.
对应blade的实现, 因为使用了INTZ, 而INTZ在某些A卡上, 如果同是作为纹理采样, 并用作depth stencil做深度测试时会有效率损失(http://aras-p.info/texts/D3D9GPUHacks.html),
需要blit出另外一个zbuffer分别使用, 反而更麻烦, 所以blade不使用early z(关闭深度测试), 直接在shader里面做两个depth clip并early out:
vertex shader:
#if !defined(DIRECTIONAL)
//use outer sphere to make sure rays covers entire volume
# if defined(POINT)
float4 posVS = float4(viewSpacePos.xyz, );
float3 halfSize = viewSpacePos.w;
# else
float4 posVS = viewSpaceBounding[];
float3 halfSize = viewSpaceBounding[].xyz;
# endif //view space depth range. note posVS.z < 0 in Right handed system
outDethRange = float2(-(posVS.z + halfSize.z), -(posVS.z - halfSize.z)); //min,max
...
#endif
pixel shader:
#if !defined(DIRECTIONAL)
//GBuffer depth
float2 depthUV = UV * depthUVSpace.zw + depthUVSpace.xy;
float depth = tex2D(depthBuffer, depthUV).r; //INTZ
depth = depth * depthFactor.z + depthFactor.w; //depth to NDC [0,1] or [-1,1]
float viewDepth = depthFactor.y / (depth + depthFactor.x); //right handed inverse calculation from NDC to viewZ (viewZ < 0, and make it > 0 )
if (viewDepth - depthRange.x < || viewDepth - depthRange.y > )
{
clip(-);
//return float4(0, 0, 0, 0); /optimized level 3(O3) will auto return on clip
}
...
#endif
代码跟上面的修改类似, 在vertex shader里面根据view space的bounding, 计算light volume 的zmin和zmax, 在pixel shader里面做剔除。
需要注意, 尽量使用view space的李linear depth来比较,因为直接比较zbuffer depth的话, 误差会比较大. 如果加上误差容许, 那么远处的depth因为精度低的原因, 会导致没有被clip掉, 也就是说因为zbuffer的深度是非线性的,所以误差根距离相关并不好控制.
做完基于depth的clip之后, 还可以基于光照属性,比如light 的范围, spot light的angle来clip, 这样只会有少量的计算(ray计算position,然后计算是否受光照), 如果不在范围内就clip掉,避免后面的color/normal采样和光照计算。 而比较时需要用的这些参数计算, 因为计算光照也需要, 所以并不浪费。
3. Quad vs volume
intel的pdf中也提到, 使用quad效率要比使用light volume效率高, light volume顶点多有点浪费. 所以blade也改成quad绘制, 用scrren space的full screen quad做vertex buffer, vertex shader里面做scale+offset. light helper依然使用volume来显示, 这样看起来比较直观方便。
这里记录一些小的细节:
不管是用light volume还是quad, 都可能会有极少部分没有计算光照:
/* using farther plane:
light volume: use farther/center plane causing volume not fully covered (filled in x)
+------------------+
|\ /|
|x\ /x|
|xx\ /xx|
|xxx\ /xxx|
+----\ /----+
minRay maxRay
*/
即便使用light volume(sphere), 两个view ray也不能完全覆盖前面部分的半球, 会有极少部分遗漏,偶尔会发现光照突然消失的竖块。如果使用back plane(further plane)问题更严重。
更新: light volume会覆盖切线, 切线内的范围是光照的最大范围, 所以范围够了. 唯一的两个问题是mesh精度导致没有到切线; 以及过了切线的部分有重复shading
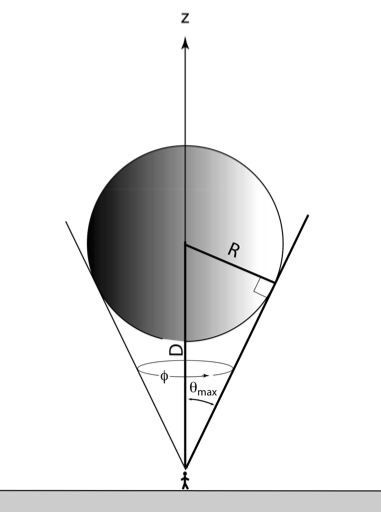
intel的那个实现使用的是front plane+depth less的深度测试。front plane投影的面积虽然大, 可以覆盖全部volume,但是在视锥外的时候,会被设备clip掉(1或者-1之外),导致计算光照错误:
/* using nearer(front) plane:
+--------------------------+
\ /
\ +--/--+ farther plane
\ | / |
\ |/ | Center
\ / |
\ /+-----+ nearer plane - clipped!
*/
仍然有部分光照没有计算。
blade的解决方法是: 使用back plane并放大,放大到和front plane投影面积一样大。scale可以根据深度参数计算,而深度在前面需要depth clip的时候后正好已经计算过了, 所以成本很低:
//screen pos:
posVS.z -= halfSize.z; //use farther plane, to avoid near clip (xy outrange[-1,1])
float4 projCenter = mul(posVS, projMatrix);
projCenter /= projCenter.w;
//farther plane is too small to cover the volume, scale it to the same projection size of nearer plane
float scale = outDethRange.y / outDethRange.x;
posVS.xy += halfSize.xy*scale;
float4 projMax = mul(posVS, projMatrix);
projMax /= projMax.w; pos.xy = pos.xy*(projMax.xy - projCenter.xy) + projCenter.xy;
这样就可以把(-1,-1),(-1,1),(1,1),(1,-1)的full screen quad计算到屏幕上覆盖light范围的quad。
还有需要注意的是vertex shader中计算出的ray不能normalize, 之前在方向光的时候normalize不影响,因为投影到全屏是等距离的,ray的长度必定相等,不影响GPU插值,没有出现问题;light volume因为顶点比较多所以插值误差比较小;现在quad只有四个顶点,非方向光的话,quad的位置在屏幕并不对称,两个ray的长度通常不相等, normalize之后插值的结果方向不对。
4. Light quad merging
如果使用了quad来lighting, 那么也很方便在screen space合并灯光的quad, 这样理论上可以分割,合并所有重合区域, 在合并的区域内迭代计算每个光源, 最终效果是, Gbuffer只采样一次, blending也没有重复, 这样的效率应该不比tile based 方法低,
不过这一点目前只是简单探讨和感想, 具体怎么分割和合并还没有具体去想。
5.Tile based deferred shading
这个是现在比较高效的方法, 还有一个cluster的方法,比这个方法更复杂,效率更高一点。原理都很类似, 划分区域并减少重复的sampling和blending,解决deferred方式的IO瓶颈。
目前正在考虑是否要在SM3.0上实现tiled方法, 这里有个龚大大的文章, 值得参考:
根据tile based原理,可以做出很多具体实现和变种,龚敏敏大大的实现就是一种,我也想了一种实现,效率不一定比他的高,但是记下来以便以后尝试:
在CPU端计算screen space下每个光源对每个tile的影响, (忽略tiled方法中每个tile的深度), 生成一张每个tile的光源索引的texture, 然后再pixel shader里面索引光照并计算.
这种方式可以支持任意多的光源, 并不需要多个批次, 但是culling变成per pixel的, 所以比常规tile based方式效率要低, 但是仍在tile里迭代计算, 因为没有多次sampling和blending, 效率应该比deferred shading高, 后面有时间的话会尝试一下, 待议。因为128盏灯光一般来说游戏已经够用了,这个时候deffered shading效率可以接受。如果硬件配置比较低,或者灯光数量太多时用再考虑。
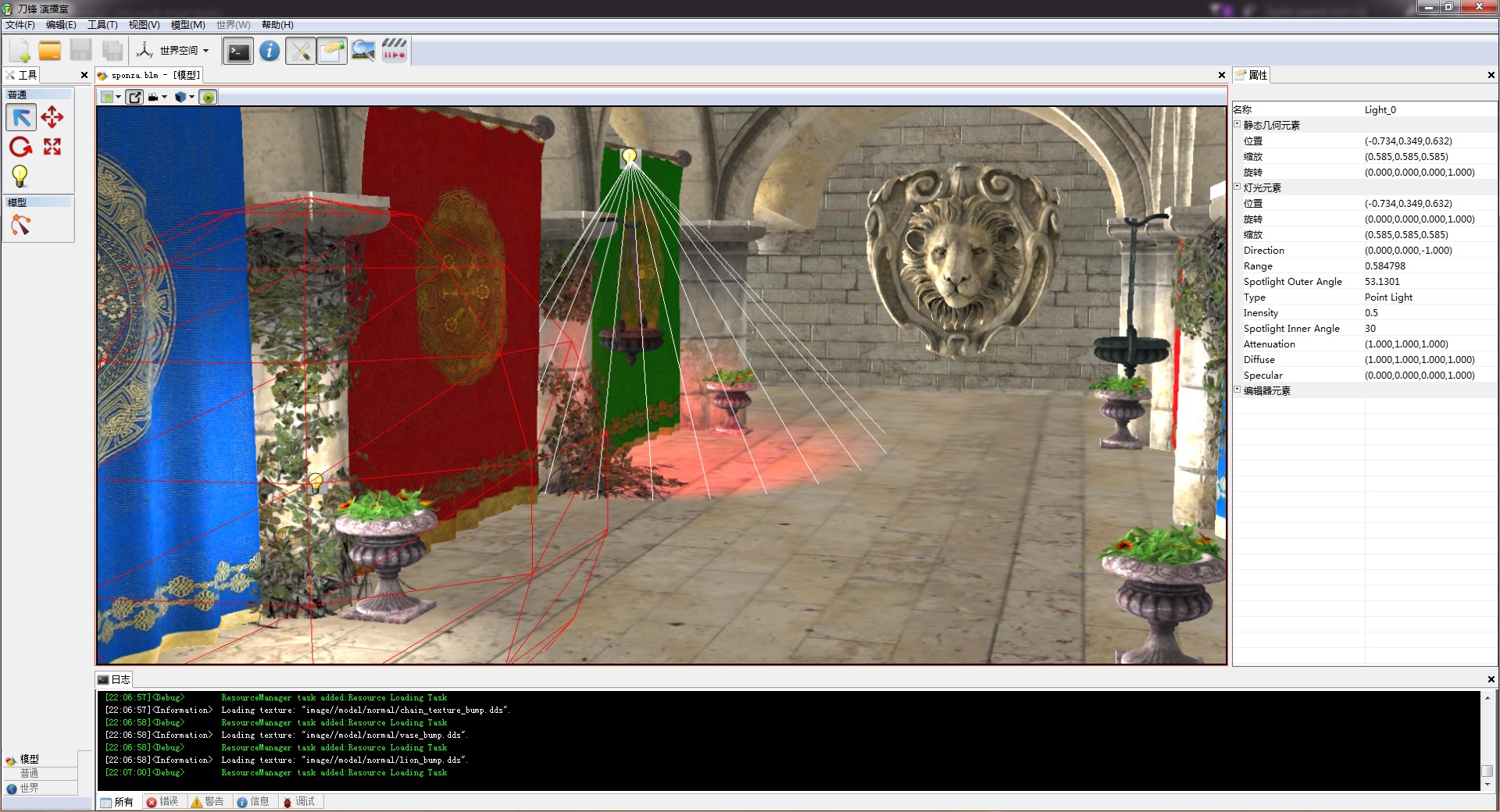
最后还是传统,发截图留念
引擎设计跟踪(九.14.3.2) Deferred shading的后续实现和优化的更多相关文章
- 引擎设计跟踪(九.14.3.1) deferred shading: Depthstencil as GBuffer depth
问题汇总 1.Light support for Editor编辑器加入了灯光工具, 可以添加和修改灯光. 问题1. light object的用户互交.point light可以把对应的volume ...
- 引擎设计跟踪(九.14.3.3) Deferred shading的一些小细节
1.ambient light 之前的shader里面, 方向光会加上ambient 的计算. 但是如果没有方向光, 就没有ambient. 这是把全局方向光改为点光源之后发现的, 因为透明物体的fo ...
- 引擎设计跟踪(九.14.2a) 导出插件问题修复和 Tangent Space 裂缝修复
由于工作很忙, 近半年的业余时间没空搞了, 不过工作马上忙完了, 趁十一有时间修了一些小问题. 这次更新跟骨骼动画无关, 修复了一个之前的, 关于tangent space裂缝的问题: 引擎设计跟踪( ...
- 引擎设计跟踪(九.14.3) deferred shading 准备
目前做的一些准备工作 1.depth prepass for forward shading. 做depth prepass的原因是为了完善渲染流程, 虽然架构上支持多个pass, 但实际上从来没有测 ...
- 引擎设计跟踪(九.14.2 final) Inverse Kinematics: CCD 在Blade中的实现
因为工作忙, 好久没有记笔记了, 但是有时候发现还得翻以前的笔记去看, 所以还是尽量记下来备忘. 关于IK, 读了一些paper, 觉得之前翻译的那篇, welman的paper (http://gr ...
- 引擎设计跟踪(九.14.2i) Android GLES 3.0 完善
最近把渲染设备对应的GLES的API填上了. 主要有IRenderDevice/IShader/ITexture/IGraphicsResourceManager/IIndexBuffer/IVert ...
- 引擎设计跟踪(九.14.2g) 将GNUMake集成到Visual Studio
最近在做纹理压缩工具, 以及数据包的生成. shader编译已经在vs工程里面了, 使用custom build tool, build命令是调用BladeShaderComplier, 并且每个文件 ...
- 引擎设计跟踪(九.14.2f) 最近更新: OpenGL ES & tools
之前骨骼动画的IK暂时放一放, 最近在搞GLES的实现. 之前除了GLES没有实现, Android的代码移植已经完毕: [原]跨平台编程注意事项(三): window 到 android 的 移植 ...
- 引擎设计跟踪(九.14.2d) [翻译] shader的跨平台方案之2014
Origin: http://aras-p.info/blog/2014/03/28/cross-platform-shaders-in-2014/ 简译 translation: 作者在2012年写 ...
随机推荐
- C++11 相关教程
C++11 中文wiki: https://zh.wikipedia.org/zh-cn/C%2B%2B11 C++11 新特性介绍: https://www.kancloud.cn/wangshub ...
- springboot+mybatis+thymeleaf项目搭建及前后端交互
前言 spring boot简化了spring的开发, 开发人员在开发过程中省去了大量的配置, 方便开发人员后期维护. 使用spring boot可以快速的开发出restful风格微服务架构. 本文将 ...
- CSS3动画与JS动画的优缺点?
JS动画: 缺点:1.JS在浏览器的主线程中运行,而主线程还有其他的js脚本,样式布局,绘制任务等,对其干扰可能导致线程出现阻塞,从而造成丢帧的情况. 2.JS动画代码复杂度高于CSS3动画. 优点: ...
- ShellExecute, WinExec与CreateProcess
0x01 ShellExecute ShellExecute的功能是运行一个外部程序(或者是打开一个已注册的文件.打开一个目录.打印一个文件等等),并对外部程序有一定的控制. 函数原型: Shel ...
- JS---作用域和作用域链
JS---作用域和作用域链 作用域就是变量与函数的可访问范围,即作用域控制着变量与函数的可见性和生命周期.在JavaScript中,变量的作用域有全局作用域和局部作用域两种. //常犯的一个错误 &l ...
- java跟oracle如何计算时间差
java计算时间差: //计算入职时间 SimpleDateFormat sf = new SimpleDateFormat("yyyy-MM-dd");String date = ...
- Web应用增加struts2支持
编辑Web应用的web.xml配置文件,配置Struts2的核心Filter.下面是增加了Struts2的核心 Filter配置的web.xml配置文件的代码片段. <!-- 定义struts2 ...
- 原型设计软件介绍——Axure RPx
我个人使用的是Axure RP8版本 进去后的主页面(汉化版),可以看到上方功能栏,缩放大小功能,左下角则是软件内置的一些元件 我在左边的元件库中拖入了一个矩形框,定义为640*960个像素,并把矩形 ...
- SharePoint Framework 基于团队的开发(三)
博客地址:http://blog.csdn.net/FoxDave 用内部包进行开发 由于你的团队在开发客户端解决方案,你很可能构建通用代码库来在项目中重用.在很多情况下这种库包含的代码是内部所有的不 ...
- Oracle学习DayFour(高级子查询)
一.高级子查询 1.多列子查询 定义:主查询与子查询返回的多个列进行比较 多列子查询中的比较分为两种:成对比较:不成对比较 实例:查询与141号或174号员工的manager_id和departmen ...